
步進電機(Step motor)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰芿(或線位移S)的開環(huán)控制元件,是數(shù)字控制系統(tǒng)的一種執(zhí)行元件。工作原理是建立在被勵磁的定子電磁鐵吸引可選轉(zhuǎn)的銜鐵產(chǎn)生轉(zhuǎn)矩而旋轉(zhuǎn),即靠磁鐵引力作用把電磁能轉(zhuǎn)換成機械角位移。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率
和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個步距角。脈沖的個數(shù)決定了轉(zhuǎn)角的大小,而脈沖的頻率決定了電機的轉(zhuǎn)速。這一線性關(guān)系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領(lǐng)域用步進電機來控制變的非常的簡單。一般步進電機可分為二相、三相、四相和六相。
本系統(tǒng)步進電機選用深圳偉力驅(qū)動有限公司的VID29系列二相汽車儀表步進電機。 vID29-XX/VID29~xXp儀表步進電機是一種精密的步進電機,內(nèi)置減速比180/1的齒輪系,主要應(yīng)用于車輛的儀表指示盤,也可以用于其他儀器儀表裝置中,將數(shù)字信號直接準確地轉(zhuǎn)為模擬的顯示輸出。VID29步進電機需要兩路邏輯脈沖信號驅(qū)動,其特點如下:
可以工作于3.5V一10V的脈沖下;
輸出軸的步距角最小可以達到1/120,最大角速度6000/s,輸出轉(zhuǎn)角轉(zhuǎn)動范圍為3150。可用分步模式或微步模式驅(qū)動。
選用進口優(yōu)質(zhì)特種材料和汽車級特殊工程塑料,同時兼顧防火等安全性能;
采用具有最低噪聲和超低摩擦效果的特殊齒形,保證了馬達的長期運轉(zhuǎn)壽命和性能。
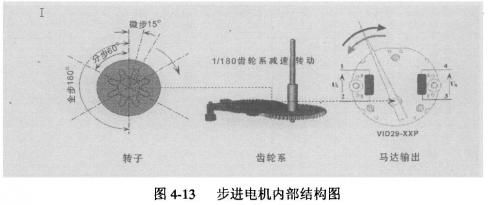
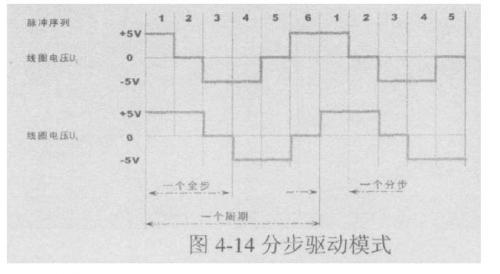
步進電機的分步驅(qū)動控制模式:VID29步進電機是經(jīng)三級齒輪減速轉(zhuǎn)動輸出的,驅(qū)動要求是用標(biāo)準的SV邏輯電路電壓,可以以分步驅(qū)動模式直接驅(qū)動馬達,電流需求為20mA。在分步模式下,每個脈沖可以驅(qū)動馬達轉(zhuǎn)子轉(zhuǎn)動600(即輸出軸轉(zhuǎn)動1/3度)。電機轉(zhuǎn)動的方向取決于施加在電機左右線圈上的周期性脈沖序列的相位差。如下圖所示,左線圈電壓UL相位超前于右線圈電壓UR時(相位差為/3),VID29一XX系列的電機輸出軸將順時針旋轉(zhuǎn),VID29一XXP系列的電機輸出軸將逆時針旋轉(zhuǎn)。
分步驅(qū)動模式脈沖序列如圖4一14所示:
微步驅(qū)動模式(細分驅(qū)動)脈沖序列如圖4-15所示:

它的轉(zhuǎn)速n(或線速度v)與脈沖頻率f成正比。步距角越小,指針轉(zhuǎn)動角度越小,儀表顯示的精度越高。步距角與脈沖頻率的關(guān)系可用以下關(guān)系式來計算:
φ=180*f/(I*S)
式中φ:步進電機的步距角
f:脈沖頻率
I:電機齒輪減速比
S:驅(qū)動模式分布數(shù)(分步/微步)
步進電機的位置和速度由導(dǎo)電次數(shù)(脈沖數(shù))和頻率成一一對應(yīng)關(guān)系,而方向由導(dǎo)電順序決定。
由于H128內(nèi)部集成了6個步進電機驅(qū)動模塊,所以無需擴展電路即可實現(xiàn)步進電機與H128硬件接口電路的連接。通過分布驅(qū)動模式,每個脈沖可驅(qū)動步進電機轉(zhuǎn)動1/3度,滿足汽車儀表的精度要求(如需更高精度,可通過擴展微步驅(qū)動芯片,使步進電機每個步為1八2度)。步進電機與H128的硬件連接如圖4一16:

圖中PUO一PU7,PVO一PV7,PWO一PW7直接與H128的輸出引腳連接。由于各步進電機直接由H128驅(qū)動,所以可以通過修改程序數(shù)據(jù)輸出接口辦法改變步進電機布置。
4.8 復(fù)位電路及E2PROM設(shè)計
單片機系統(tǒng)通常是在一個特定的客觀環(huán)境下為完成或?qū)崿F(xiàn)某種功能而設(shè)計的,因此系統(tǒng)處于工作狀態(tài)時,勢必會受到各種外界干擾因素的影響。這種外界干擾因素會導(dǎo)致系統(tǒng)內(nèi)部數(shù)據(jù)出錯,甚至?xí)乐赜绊懗绦虻倪\行,使單片機受到干擾失控導(dǎo)致導(dǎo)致程序跑飛或陷入死循環(huán),通過采取一定的軟硬件措施使程序脫離死循環(huán)或重新運行。
本系統(tǒng)采取了外擴芯片實現(xiàn)的硬件方式,選取xlc0R公司的x5045[sll。集成了看門狗定時器、EZPROM數(shù)據(jù)存儲器、和電源監(jiān)測為一體,采用SPI的方式與MCU相連,用于低電壓復(fù)位信號的單片機(H128為低電壓復(fù)位)。因其體積小、占用UO口少等優(yōu)點已被廣泛應(yīng)用于工業(yè)控制、儀器儀表等領(lǐng)域 。
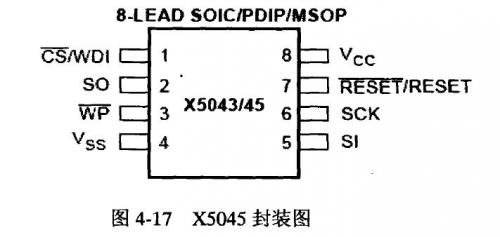
CS:芯片選擇輸入端,當(dāng)CS為低電平時芯片處于工作狀態(tài)
50:串行數(shù)據(jù)輸出端,在串行時鐘的下降沿,數(shù)據(jù)通過50端移位輸出
Sl:串行數(shù)據(jù)輸入端,數(shù)據(jù)在串行時鐘的上升沿鎖存
SCK:串行時鐘,,為數(shù)據(jù)讀/寫提供串行總線定時
WP:寫保護輸入端,當(dāng)WP為低電平時,向X5045的寫操作被禁止,但器件的其他功能正常。
RESET:復(fù)位信號輸出端。
x5045除了wTD(看門狗)功能外,另一個重要的基本功能就是作為EZPROM數(shù)據(jù)存儲器使用,內(nèi)部包含 512xs的串行EZPROM,以保證系統(tǒng)在掉電后仍可維持重要數(shù)據(jù)不變。x5045與H128采用SPI總線接口連接方式,程序,獲得準確的脈沖累計計數(shù),并將此值傳送給X5045存儲。X5045是理想的自動貯存非易失性SRAM,內(nèi)部含有EEPROM,存儲容量256bit,能夠在失去vCc的時候自動執(zhí)行存儲操作 (SRAM—EEPRoM),非常適合對里程的累計記錄。芯片內(nèi)部包含一個指令移位寄存器,該寄存器可以通過SPI來訪問。X5045與H128連接的電路如圖4一18所示:

其中PKO一PK3、RESET分別與H128上相應(yīng)的管腳相連。
4.9 其他外圍器件電路設(shè)計
4.9.1 晶振電路
本系統(tǒng)所用的晶振為SMHZ,分別對應(yīng)接到H128單片機的引腳XTAL和EXTAL上,然后利用其內(nèi)部壓控振蕩器和鎖相環(huán)(PLL)把這個頻率提高到25MHZ,作為單片機工作的內(nèi)部總線時鐘。
4.9.2 儀表背光調(diào)節(jié)電路
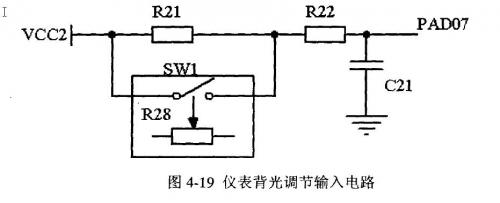
儀表背光在汽車啟動后常亮,駕駛員可根據(jù)各環(huán)境下外部光線的明暗度對汽車儀表的背光進行調(diào)節(jié),以達到最合適的感官效果。儀表背光電路通過調(diào)節(jié)電位器改變電阻值,從而改變電流的大小,MCU根據(jù)接受到的信號的值來改變PWM脈寬占空比的輸出,從而改變背光的明暗度1401.調(diào)節(jié)電路圖如圖4一19:
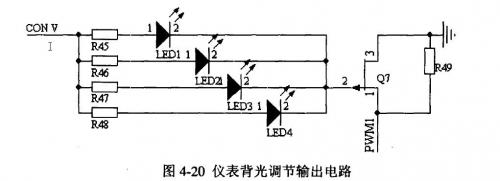
其中開關(guān)SWI為一可調(diào)電阻,通過改變電阻的大小控制電流,輸出到H128的A/D轉(zhuǎn)換接口RAD07,MCU根據(jù)周D轉(zhuǎn)換后的數(shù)據(jù)調(diào)整PWMI的輸出占空比,輸出接口CONV得到的模擬量和占空比有關(guān),如占空比為1:1,則得到的電壓值就為Vmax的1/2,即2.5v.占空比的改變使得輸出電壓變化,從而使儀表背光顯示的亮度改變131].輸出背光調(diào)節(jié)電路如圖4一20:
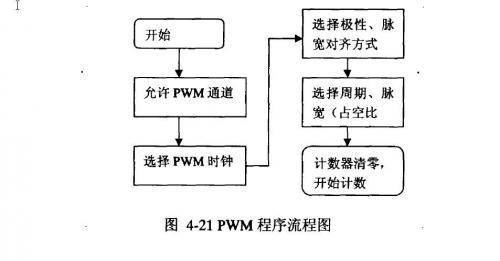
其程序流程圖比較簡單,直接在此進行了分析,如圖4一21所示:
4.9.3 狀態(tài)指示燈電路在汽車儀表的電路
設(shè)計中,一般根據(jù)外圍電子元件的布置采用正控(開關(guān)控制正極電路)和負控(開關(guān)控制負極電路)相結(jié)合的方式來控制各種狀態(tài)指示燈,同樣在本儀表也采用了這種設(shè)計方法。功能指示燈都采普亮的發(fā)光二極管,而儀表照明則采用的高亮度發(fā)光二極管,分有紅、黃、綠三種顏色,對應(yīng)不同的顯示和警告信息。發(fā)光二極管及其對應(yīng)的限流電阻,我們都采用了貼片封裝的元件。
同時,發(fā)動機出現(xiàn)故障后,如發(fā)動機水溫過高,由MCU控制對應(yīng)的故障燈會閃爍。發(fā)動機出現(xiàn)故障,其指示一般顯示為紅色,并伴隨有蜂鳴器報警。
4.9.4 語音報警電路
設(shè)計本儀表系統(tǒng)有蜂鳴器報警模塊,主要是為了提醒駕駛員注意相關(guān)的危險信息,如:水溫過高,水位過低,機油壓力過低、變速箱故障等等。MCU將采樣得到的數(shù)據(jù)與存儲在EZPRoM單元中的允許數(shù)值變化范圍比較,如果超過額定范圍,則發(fā)出信息到輸出端口,蜂鳴器報警,同時對應(yīng)的報警指示燈閃爍。在下次的采樣過程中,如果采集的數(shù)據(jù)在額定范圍之間,則蜂鳴器解除報警,狀態(tài)指示燈熄滅。
本系統(tǒng)選用的蜂鳴器為頻繁短促鳴叫,頻率為2.6KHz,音量大小為75db.由于系統(tǒng)UO端口資源非常豐富,可以共用一個端口,也可以單獨占用一個端口,單獨占用端口,有利于故障維修檢查,本系統(tǒng)在H128上預(yù)留BPO一BP3為報警電路輸出端口。
4.9.5 時鐘發(fā)生器
電路RTC模塊(實時時鐘電路)有巧個內(nèi)存映射寄存器,通過秒、分鐘、小時計數(shù)器提供的時間;通過星期、日、月份、年提供日歷功能。以上計數(shù)器每次加1時都可以產(chǎn)生中斷,并分別對相應(yīng)的中斷標(biāo)志置位,如果相應(yīng)的中斷被允許則可以產(chǎn)生CPU中斷請求。
用于驅(qū)動時間和日歷的IHZ時鐘使內(nèi)嵌的補償單元能夠補償晶振的誤差,這樣通過頻率補償機制能夠使IHZ時鐘獲得用于驅(qū)動整個模塊的晶振更高的精度。
補償值可以在模塊的校準操作時通過應(yīng)用軟件設(shè)置或自動獲取澎].計時功能是通過一個時鐘頻率為128Hz(CGMXCLK/256)的計數(shù)器來實現(xiàn)的。
這個計數(shù)器可以在任何時候開始、。停止和清除。這個計數(shù)器的值被換算到looHZ對應(yīng)的值,并存儲到計時數(shù)據(jù)寄存器中(chronographdatarcgister)。因此,數(shù)據(jù)寄存器中的值為O一99,每增加1代表1/1005(loms)。數(shù)據(jù)寄存器的值滿足以下關(guān)系式:S=「(128HzeountervalueX25)+16]/32計時計數(shù)器的精度是士sms.
4.10 PCB板的設(shè)計
在以往儀表電路設(shè)計過程中,儀表的電路通常是在儀表背后附上一層軟性塑料(撓性塑料),在塑料上覆銅進行電路連接,這種接法通常適用于比較簡單的電路。由于電子技術(shù)的發(fā)展,軟性塑料已不能滿足儀表功能繁多的要求,并逐漸為
硬質(zhì)板取代。也就是印制板,通常所說的PcB板 。
電路板設(shè)計與電路圖設(shè)計不同之處在于,電路板屬于比較實體化的東西,而電路圖屬于比較抽象的東西。所以,在設(shè)計電路圖時,比較著重于電路的電氣性質(zhì)。而在設(shè)計電路板時,比較著重于電路的實際尺寸與空間配置(立體)。下面就電路板的設(shè)計分為以下幾步;
第一步,先設(shè)計電路圖,確定元件的排序和元件的封裝(Footprint),然后通過程序所提供的ERC檢查。
第二步,電路圖設(shè)計完成后,利用CreateNetlist功能產(chǎn)生網(wǎng)絡(luò)表。
第三步,進入PCB編輯器,首先定義板框,即板子的大小、板層數(shù)與形狀。
第四步,加載網(wǎng)絡(luò)表,如果網(wǎng)絡(luò)表(或電路圖)有錯誤,或接口上的問題,將會在此階段中出現(xiàn)。可以根據(jù)產(chǎn)生的錯誤,重新會到電路圖進行修改。
第五步,布置元件,這項工作是電路板設(shè)計中最基礎(chǔ)、最麻煩也是影響最大的工作。
第六步,定義設(shè)計規(guī)則,進行手工布線或自動布線。
第七步,完成布線后,進行設(shè)計驗證檢查。如果沒有發(fā)現(xiàn)錯誤,即可存盤輸出。
印制板通常有紙質(zhì)覆銅板、環(huán)氧樹脂板、玻纖板等,在這里考慮到價格的因素以及性能的要求,我們選取環(huán)氧樹脂板,其價格適中,也能滿足汽車運行的工作環(huán)境,PCB采用雙面布線,并在部分信號電路增加焊盤測點,以利于儀表電路功能的檢測,減少故障返修率。