隨著城市化進(jìn)程的加速發(fā)展,大型醫(yī)院病人的日益增多,,現(xiàn)有的病人病情監(jiān)護(hù)機(jī)制已經(jīng)不能滿足需要,,因其不能實(shí)時(shí)對(duì)病人的狀況進(jìn)行監(jiān)護(hù),造成耽誤救治,、誤診時(shí)有發(fā)生,。人們對(duì)醫(yī)療健康的關(guān)注和高質(zhì)量醫(yī)療服務(wù)的需求,使得基于WSN 技術(shù)的無線醫(yī)療監(jiān)護(hù)也越來越受到人們重視。ZigBee 技術(shù)在構(gòu)建智慧醫(yī)療無線傳感網(wǎng)絡(luò)時(shí),,具有獨(dú)特的優(yōu)勢(shì),。能實(shí)時(shí)的獲取病人的生命特征數(shù)據(jù),并通過智能終端設(shè)備,,無線網(wǎng)絡(luò)向護(hù)士,、醫(yī)生、控制中心實(shí)時(shí)傳輸,。
1 Zigbee技術(shù)
Zigbee 技術(shù)近年來在無線傳感領(lǐng)域應(yīng)用非常廣泛,。IEEE802.15.4 協(xié)議標(biāo)準(zhǔn)定義了它的PHY 層和MAC層,ZigBee 聯(lián)盟制定了網(wǎng)絡(luò)層,、安全和應(yīng)用層標(biāo)準(zhǔn),,用戶可根據(jù)自己的應(yīng)用需求進(jìn)行應(yīng)用層開發(fā)。網(wǎng)絡(luò)的工作頻段分為868MHz,915MHz 和2.4GHz 共3 個(gè)頻段,。在通信上,,采用CAMA/CA(免沖突多載波信道)接入方式,有效避免了無線電載波間的沖突,;能實(shí)現(xiàn)密鑰長度為128 位的加密算法對(duì)數(shù)據(jù)進(jìn)行加密,,確保了通信數(shù)據(jù)的安全保密性。網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)有星形,、樹形和網(wǎng)絡(luò)形,,能實(shí)現(xiàn)自動(dòng)組網(wǎng)、多跳路由,。滿足了醫(yī)院病人實(shí)時(shí)監(jiān)護(hù)的組網(wǎng)需求,。
Zigbee 技術(shù)在組網(wǎng)時(shí)的特點(diǎn):
① 低功耗:在低耗電待機(jī)模式下,2 節(jié)5 號(hào)干電池可支持1 個(gè)節(jié)點(diǎn)工作6~24 個(gè)月,,甚至更長,。
低成本:通過大幅簡(jiǎn)化協(xié)議,降低了對(duì)通信控制器的要求,,ZigBee 免協(xié)議專利費(fèi),,每塊芯片的價(jià)格大約為2 美元。
② 低速率:ZigBee 工作在20~250 kbps 的較低速率,,分別提供250 kbps(2.4GHz),、40kbps (915 MHz)和20kbps(868 MHz) 的原始數(shù)據(jù)吞吐率,滿足低速率傳輸數(shù)據(jù)的應(yīng)用需求,。
③ 近距離:相鄰節(jié)點(diǎn)間的傳輸范圍一般介于10~100 m 之間,,在增加RF 發(fā)射功率后,亦可增加到1~3 km.如果通過路由和節(jié)點(diǎn)間通信的接力,,傳輸距離將可以更遠(yuǎn),。
④ 短時(shí)延:ZigBee 的響應(yīng)速度較快,,一般從睡眠轉(zhuǎn)入工作狀態(tài)只需15 ms,節(jié)點(diǎn)連接進(jìn)入網(wǎng)絡(luò)只需30 ms .
⑤ 高容量:ZigBee 可采用星狀、片狀和網(wǎng)狀網(wǎng)絡(luò)結(jié)構(gòu),,由一個(gè)主節(jié)點(diǎn)管理若干子節(jié)點(diǎn),,最多一個(gè)主節(jié)點(diǎn)可管理254 個(gè)子節(jié)點(diǎn);同時(shí)主節(jié)點(diǎn)還可由上一層網(wǎng)絡(luò)節(jié)點(diǎn)管理,,最多可組成65000 個(gè)節(jié)點(diǎn)的大網(wǎng),。
⑥ 高安全:提供了三級(jí)安全模式,包括無安全設(shè)定,、使用接入控制清單(ACL) 防止非法獲取數(shù)據(jù)以及采用高級(jí)加密標(biāo)準(zhǔn)(AES 128)的對(duì)稱密碼,。
⑦ 免執(zhí)照頻段:采用直接序列擴(kuò)頻在工業(yè)科學(xué)醫(yī)療(ISM) 頻段,2.4 GHz(全球) ,、915 MHz(美國) 和868 MHz(歐洲),。
2 系統(tǒng)及網(wǎng)絡(luò)結(jié)構(gòu)
本文設(shè)計(jì)的醫(yī)院病人實(shí)時(shí)監(jiān)護(hù)系統(tǒng)分為三層:病人所攜帶的各種傳感器構(gòu)成的感知層、Zigbee 技術(shù)構(gòu)建的無線網(wǎng)絡(luò)層,、控制中心的應(yīng)用層(如圖1 所示)。
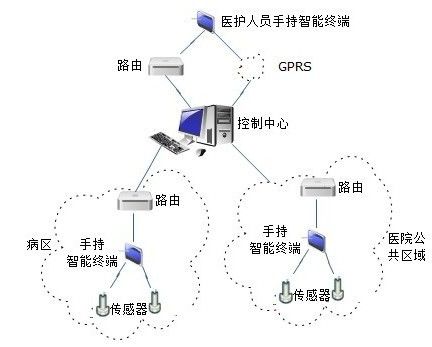
圖1 系統(tǒng)及網(wǎng)絡(luò)結(jié)構(gòu)圖
當(dāng)病人攜帶無線監(jiān)護(hù)器(傳感器)和智能終端設(shè)備在醫(yī)院的病區(qū)和公共區(qū)域活動(dòng)時(shí),,各種傳感器能實(shí)時(shí)記錄穩(wěn)定狀態(tài),、空間位置(定位)、心率,、體溫,、呼吸等人體生命特征數(shù)據(jù),通過Zigbee 網(wǎng)絡(luò)上傳到控制中心,,得到醫(yī)護(hù)人員的實(shí)時(shí)監(jiān)護(hù),。
無線網(wǎng)絡(luò)由協(xié)調(diào)器節(jié)點(diǎn)(控制中心),適當(dāng)數(shù)目的路由器節(jié)點(diǎn)(路由)和大量的終端節(jié)點(diǎn)(手持智能終端)組成,,如果地理空間較大的話,,也可以多協(xié)調(diào)器組網(wǎng)。這種組網(wǎng)方式具有極好的靈活性,,病人持有的終端節(jié)點(diǎn)進(jìn)入相應(yīng)的路由區(qū)域都能自動(dòng)組網(wǎng),。GPRS模塊給遠(yuǎn)離醫(yī)院的醫(yī)護(hù)人員能不間斷的監(jiān)護(hù)提供了可能。
若綜合考慮經(jīng)濟(jì)等方面因素,,各種傳感器(數(shù)字脈搏傳感器,、數(shù)字體溫傳感器、血壓傳感器,、呼吸傳感器,、數(shù)字三軸加速度傳感器、RSSI 定位傳感器)可部分設(shè)計(jì)在病人手持智能終端上,,也可單獨(dú)設(shè)計(jì)成產(chǎn)品,。手持智能終端預(yù)留接口,,靈活選配使用。
3 系統(tǒng)設(shè)計(jì)
3.1 硬件設(shè)計(jì)
3.1.1 病人手持智能終端
病人手持智能終端基于TI 公司的CC2530芯片開發(fā),,CC2530 芯片廣泛應(yīng)用在2.4-GHz IEEE 802.15.4系統(tǒng),、RF4CE 遙控制系統(tǒng)、ZigBee 系統(tǒng),、低功耗無線傳感器網(wǎng)絡(luò),、消費(fèi)類電子和衛(wèi)生保健。CC2530 需要實(shí)現(xiàn)的功能以及外圍模塊主要有3 個(gè)部分:通過A/D 口控制傳感器模塊進(jìn)行數(shù)據(jù)采集,;控制無線RF 模塊完成數(shù)據(jù)收發(fā),;通過I/O 口相應(yīng)主機(jī)控制。傳感器采集的數(shù)據(jù)也可通過I/O 口與微處理器相連,,通過RS232接口可實(shí)現(xiàn)網(wǎng)絡(luò)節(jié)點(diǎn)與PC 機(jī)的通信,。
由于CC2530 芯片內(nèi)集成了許多特色功能模塊,因此,,其典型的外圍電路也就非常簡(jiǎn)潔(如圖2),。其中,主時(shí)鐘晶振采用32mhz 無源晶振以及32.768khz時(shí)鐘晶振,;無線RF 模塊外圍電路采用無巴倫的阻抗匹配網(wǎng)絡(luò),,天線使用50 歐鞭狀負(fù)極性天線。且將數(shù)字三軸加速度傳感器和RSSI 定位傳感器集成在智能終端上,。
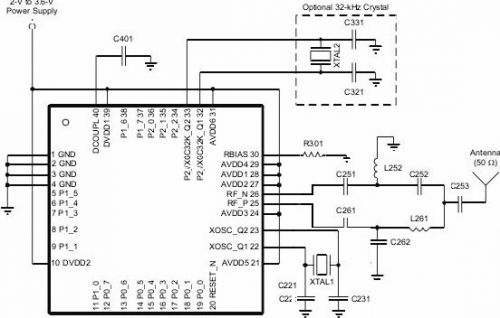
圖2 CC2530 外圍電路圖
3.1.2 路由
基于TI 公司的CC2530 芯片開發(fā),,采用高性能的工業(yè)級(jí)32 位通信處理器、工業(yè)級(jí)蜂窩無線模塊和ZigBee 模塊,,以嵌入式實(shí)時(shí)操作系統(tǒng)為軟件支撐平臺(tái),,同時(shí)提供RS232(或RS485/RS422)、以太網(wǎng)和ZigBee接口,,可同時(shí)連接串口設(shè)備,、以太網(wǎng)設(shè)備和ZigBee 設(shè)備,實(shí)現(xiàn)數(shù)據(jù)透明傳輸功能和路由功能,。
3.1.3 醫(yī)護(hù)人員手持智能終端
可采用ARM+WinCE 架構(gòu),,提供Zigbee、GPRS,、藍(lán)牙,、串口、USB 等多方式的網(wǎng)絡(luò)接口,,集成化軟件服務(wù)平臺(tái),,方便醫(yī)護(hù)人員透明化的應(yīng)用。
3.1.4 控制中心
控制中心由CC2530 和PC 機(jī)構(gòu)成,,CC2530 作為ZigBee 網(wǎng)絡(luò)的協(xié)調(diào)器,,負(fù)責(zé)整個(gè)網(wǎng)絡(luò)的建立和管理,。
病人的生命參數(shù)指標(biāo)和呼叫信息,通過網(wǎng)絡(luò)轉(zhuǎn)發(fā)到控制中心進(jìn)行集中顯示,,并通過串口傳至PC 機(jī)進(jìn)行存儲(chǔ)以便進(jìn)行查詢,。生命特征數(shù)據(jù)偏離了正常值而自動(dòng)產(chǎn)生的報(bào)警信息會(huì)發(fā)至對(duì)應(yīng)醫(yī)護(hù)人員的手持設(shè)備上。
3.2 軟件設(shè)計(jì)
3.2.1 系統(tǒng)網(wǎng)絡(luò)啟動(dòng)流程圖
基于Zigbeer 技術(shù)能實(shí)現(xiàn)自組網(wǎng)功能,,網(wǎng)絡(luò)協(xié)調(diào)器(控制中心),、路由節(jié)點(diǎn)和終端節(jié)點(diǎn)在啟動(dòng)時(shí),能根據(jù)自身狀態(tài)自動(dòng)組網(wǎng)或加入網(wǎng)絡(luò)(圖3),。

圖3 系統(tǒng)網(wǎng)絡(luò)啟動(dòng)流程圖
3.2.2 傳輸生命特征數(shù)據(jù)原理
只要病人身上攜帶有無線監(jiān)護(hù)器,,相應(yīng)傳感設(shè)備就能自動(dòng)發(fā)出代表病人身份的信號(hào)和生命特征數(shù)據(jù)。
手持智能終端就將病人的身份信息發(fā)送到最近的路由節(jié)點(diǎn),,通過網(wǎng)絡(luò)發(fā)送到數(shù)據(jù)中心站,,確認(rèn)身份后,病人當(dāng)前的生命特征數(shù)據(jù)(如體溫,、心跳,、血壓、呼吸狀態(tài)等)就會(huì)發(fā)送給控制中心,。
3.2.3 數(shù)字三軸加速度平衡檢測(cè)算法
三軸加速度傳感器工作時(shí),,敏感元件將被測(cè)點(diǎn)的加速度信號(hào)轉(zhuǎn)換為成比例的電信號(hào),進(jìn)入信號(hào)調(diào)整電路進(jìn)行放大調(diào)整,、改善信號(hào)的信噪比,再進(jìn)入單片機(jī),,由軟件控制單片機(jī)內(nèi)的多路選擇器將3 個(gè)軸的信號(hào)分時(shí)輸入A/D 轉(zhuǎn)換器,,進(jìn)行模數(shù)轉(zhuǎn)換得到數(shù)字信號(hào),然后,,RS422 接口串行輸出到上位機(jī),。
以Z 軸對(duì)應(yīng)人體直立時(shí)的垂直軸,X 軸對(duì)應(yīng)人體的前后向水平軸,,Y 軸對(duì)應(yīng)人體左右側(cè)向水平軸,, X、Y,、Z 軸相互正交,,任意空間方向上的矢量變化均可以分解成X、Y,、Z 三個(gè)方向上的分量變化,,在直角坐標(biāo)系下從人體由直立狀態(tài)變?yōu)榻舆M(jìn)水平狀態(tài)、人體較長時(shí)間處于接近水平狀態(tài),、加速度的變化速度較快三個(gè)方面,,通過閾值來判斷是否發(fā)生跌倒,。
3.2.4 RSSI 定位算法
根據(jù)定位機(jī)制不同,定位算法總體上可分為2 類:
① 基于測(cè)量距離(range-based)的定位算法,,通過測(cè)量節(jié)點(diǎn)間的距離或角度信息使用三邊測(cè)量,、三角測(cè)量或最大似然估計(jì)定位法計(jì)算節(jié)點(diǎn)位置,其定位精度較高,,比較常用的測(cè)距技術(shù)有RSSI,、TOA、TDOA 和AOA.
② 不需要測(cè)距算法(range-free),,利用節(jié)點(diǎn)間的鄰近關(guān)系和連通性實(shí)現(xiàn)定位的算法,,定位精度較低,如DV-hop 算法,、GPS-less LCO 算法等,。
3.2.5 醫(yī)護(hù)人員手持智能終端系統(tǒng)設(shè)計(jì)
醫(yī)護(hù)人員智能終端系統(tǒng)選用帶有觸屏的ARM9 開發(fā)板,內(nèi)置Windows CE 6.0 操作系統(tǒng),,用,。NET 編寫的用戶界面程序。主要實(shí)現(xiàn)如下功能:
病人信息查詢:通過觸摸屏進(jìn)行瀏覽,,可查詢出病人的名稱,、入院時(shí)間、病情,、診斷信息等,。
用藥提醒:提醒病人按時(shí)服藥。
服務(wù)呼叫:對(duì)突發(fā)的情況,,提供呼叫服務(wù)功能,。
治療記錄:病人治療過程在線記錄。
4 實(shí)驗(yàn)與數(shù)據(jù)分析
4.1 Zigbee 網(wǎng)絡(luò)(模塊)組網(wǎng)測(cè)試
本實(shí)驗(yàn)基于文中(圖1)構(gòu)建的網(wǎng)絡(luò)結(jié)構(gòu),,利用病人手持智能終端外接溫度傳感器進(jìn)行數(shù)據(jù)采樣,、發(fā)送,輔助器材(如電吹風(fēng))產(chǎn)生不同的溫度值,,控制中心進(jìn)行數(shù)據(jù)接收,,實(shí)驗(yàn)數(shù)據(jù)如下:(×表數(shù)據(jù)丟失)。
表1 網(wǎng)絡(luò)測(cè)試數(shù)據(jù)表
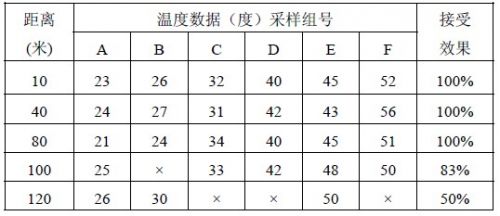
從實(shí)驗(yàn)數(shù)據(jù)分析可知,,在80 米范圍內(nèi),,本網(wǎng)絡(luò)能正確的進(jìn)行數(shù)據(jù)傳輸,當(dāng)通信距離接近100 米時(shí),,會(huì)產(chǎn)生數(shù)據(jù)丟失,。因此,在構(gòu)建WSN 時(shí),,應(yīng)保證相鄰路由節(jié)點(diǎn)間的距離不應(yīng)大于160 米,。在Zigbee 模塊沒有增加RF 發(fā)射功能時(shí),,節(jié)點(diǎn)間距離在100 米以內(nèi)最穩(wěn)定。
表2 智能終端傳感測(cè)試數(shù)據(jù)表

4.2 病人手持智能終端性能測(cè)試
由于病人手持智能終端可外接的傳感器較多,,本實(shí)驗(yàn)只選取手持智能終端上集成的數(shù)字三軸加速度傳感器進(jìn)行性能測(cè)試,。
測(cè)試過程由6 個(gè)志愿者協(xié)助,攜帶樣機(jī)就向前跌倒,、向后跌倒,、向左跌倒、向右跌倒四個(gè)姿勢(shì)進(jìn)行,,控制中心進(jìn)行相關(guān)信息的獲取,。
從這個(gè)實(shí)驗(yàn)中可以看出基于CC2530+數(shù)字三軸加速度傳感器的解決方案能夠有效地對(duì)跌倒?fàn)顟B(tài)進(jìn)行檢測(cè)。當(dāng)然,,這里只是一個(gè)簡(jiǎn)單的實(shí)驗(yàn)方案,,對(duì)于其它的傳感器同樣需要進(jìn)行更加全面、有效和長期的實(shí)驗(yàn)來驗(yàn)證該解決方案的可靠性,。
5 總結(jié)
無線醫(yī)療監(jiān)護(hù)系統(tǒng)能使醫(yī)院和醫(yī)護(hù)人員實(shí)時(shí)的掌握病人信息,、生命特征數(shù)據(jù),及時(shí)響應(yīng)實(shí)發(fā)事件(如跌倒,、走失,、呼救等)、人性化的管理病人,。同時(shí),,病人能自由組合的使用各種傳感監(jiān)護(hù)器監(jiān)護(hù)自身的各種生命參數(shù)指標(biāo),對(duì)治療的效果和進(jìn)程明晰,,能緩解治療情緒,,有利于治療,該系統(tǒng)有著廣泛的實(shí)用性和社會(huì)需求,。
