伺服系統(tǒng)是控制系統(tǒng)中不可或缺的組成部分,。電機(jī)作為伺服系統(tǒng)中關(guān)鍵部件,,對電機(jī)的控制精度和準(zhǔn)確度要求越來越高。無刷電機(jī)因其壽命長,、可靠性好,、運行效率高、無勵磁損耗以及調(diào)速性能好等諸多優(yōu)點,,在伺服系統(tǒng)中應(yīng)用越來越廣泛,。使用數(shù)字信號處理器(DSP)實現(xiàn)無刷直流電機(jī)的伺服系統(tǒng)可以只用一片DSP實現(xiàn)比較復(fù)雜的算法,控制精度高,,可對伺服系統(tǒng)進(jìn)行更有效的控制,。文中以TMS320F2812為控制核心實現(xiàn)對直流無刷電機(jī)伺服系統(tǒng)的控制,并給出了試驗結(jié)果,。
1 控制器原理及設(shè)計方案
1.1 控制器原理及硬件設(shè)計
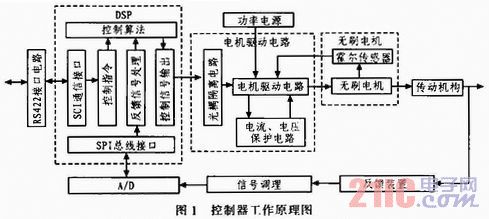
控制器分為3個單元:中央處理單元即DSP用于接受控制指令,,計算并校正控制信號;電機(jī)驅(qū)動單元驅(qū)動電機(jī)工作,;執(zhí)行機(jī)構(gòu)執(zhí)行主控指令并反饋伺服機(jī)構(gòu)狀態(tài)給中央處理單元以校正伺服機(jī)構(gòu)狀態(tài),。工作原理如圖1所示。
1.2 電源電路
由于DSP和外圍芯片工作電壓為5 V和3.3 V,。電位器輸入電壓為+12 V和-12 V,。因此使用DC/DC電壓轉(zhuǎn)換器將+27 V輸入電壓轉(zhuǎn)換成+12 V和-12 V 工作電壓,,用CW78L05將+12 V電壓轉(zhuǎn)換成5 V工作電壓。同理用FW431將5 V電壓轉(zhuǎn)換成4 V的基準(zhǔn)電壓和3.3 V芯片工作電壓,。
1.3 中央處理單元
由TMS320F2812作為中央處理芯片由RS422接口和SCI通信接口接收主控指令信號并轉(zhuǎn)換成控制指令信號,。由SPI總線接口接收執(zhí)行機(jī)構(gòu)反饋回來的執(zhí)行機(jī)構(gòu)的位置信號與控制信號一起通過控制算法轉(zhuǎn)換成PWM輸出。
DSP的外圍電路通常由時鐘電路,、JTAG接口電路組成,。時鐘電路使用20 MHz晶振,5倍頻后DSP工作在100 MHz的頻率,。每個電源入口用0.1μF的電容濾波及隔離,。
伺服控制電路與主控之間的通信采用RS422異步全雙工傳輸方式,采用MAX3160通信芯片實現(xiàn),。
1.4 反饋電路
反饋部分采用在執(zhí)行機(jī)構(gòu)安裝同步電位計,,通過電位計反饋電壓信號,經(jīng)過信號調(diào)理后,,經(jīng)由A/D轉(zhuǎn)換器將數(shù)字信號反饋給DSP,。
反饋信號信號淵理電路選用LM148,并存輸入信號端加入由10 kΩ電阻和0.1μF電容組成的RC低通濾波電路,。由于DSP中A/D轉(zhuǎn)換的位數(shù)不足,,因此選用TLC2574將放大后的反饋模擬信號轉(zhuǎn)換成數(shù)字信號,并通過SDI和SDO端口與DSP傳遞數(shù)字信號,。
1.5 驅(qū)動電路
DSP輸出的PNM和DIR信號為3.3 V,,為避免驅(qū)動能力不足,DSP的輸出信號經(jīng)SN74ALVC164245由3.3 V上拉至5 V,,輸山電流為24 mA,。
光耦隔離電路用于將功率驅(qū)動電路的信號與DSP控制信號進(jìn)行隔離,避免功率電源對數(shù)字控制電路造成干擾,。光耦選用HCPL2231,,該芯片由兩路獨立光耦組成,當(dāng)輸入為低時,,二極管導(dǎo)通,,輸出為高。輸出信號+15 V上拉,。
由于驅(qū)動板中運放LM193和FN3140,,以及邏輯門電路4069、4070,、4073,、4081的工作電壓為+15 V,因此需要將系統(tǒng)工作電壓+27 V經(jīng)由電源模塊轉(zhuǎn)換成驅(qū)動板中芯片工作電壓+15 V,。邏輯門電路根據(jù)電機(jī)霍爾位置信號HA,、HB,、HC和電機(jī)方向信號DIR產(chǎn)生控制6個MOS管開關(guān)的控制信號。并且將PWM信號合成到功率開關(guān)管的導(dǎo)通相序中,。
驅(qū)動部分前級驅(qū)動電路采用IR2103,,以提高邏輯電路輸出信號的驅(qū)動能力,用來開啟和關(guān)閉后級的大功率晶體管,。芯片輸出采用自舉方式,。功率電路采用6個IRFP250功率管組成全橋式電路。最大供電電壓90 V,,最大持續(xù)工作電流33A,。
當(dāng)伺服系統(tǒng)中出現(xiàn)持續(xù)過載情況或者逆變電路出現(xiàn)直通時,電路輸出電流過大,,會燒壞電機(jī)或損壞功率器件,,因此需加入過流保護(hù)電路。將采樣電阻采集的信號進(jìn)行濾波處理后與設(shè)定值比較,,以限定電機(jī)的最大工作電流,。
2 軟件系統(tǒng)
控制軟件采用模塊化設(shè)計,針對各個功能設(shè)計相應(yīng)的程序模塊,。主程序通過對各個子函數(shù)的合理調(diào)用和控制最終實現(xiàn)整個伺服系統(tǒng)的合理工作,。
當(dāng)系統(tǒng)開始工作時,首先完成對各個程序模塊的初始化,,包括CPU時鐘、看門狗,、中斷,、SCI口、定時器,、控制參數(shù),、PWM等。完成各個模塊的初始化后,,在最后的死循環(huán)中,,執(zhí)行伺服機(jī)構(gòu)控制算法等待串口中斷:首先啟動AD采集,采樣結(jié)束后,,讀取AD的采樣結(jié)果,。利用采樣結(jié)果和通過中斷接收的伺服控制指令控制電機(jī)工作。如果判斷通信出現(xiàn),,則執(zhí)行SCI口初始化,,重新復(fù)位串口??刂栖浖捎肅語言編寫,,各個模塊可以相互調(diào)用,,工作效率高,可以實現(xiàn)實時控制,。
3 測試系統(tǒng)及試驗結(jié)果
測試系統(tǒng)采用直流穩(wěn)壓電源提供+27 V控制電,,兩個直流電源提供電機(jī)工作電壓,其中-45 V為工作電壓,,+45 V為補(bǔ)償電壓,。測試平臺采用研華的數(shù)據(jù)采集和控制平臺,由LabCVI實現(xiàn)對控制電路的仿真測試控制和數(shù)據(jù)采集,。試驗結(jié)果如下圖所示,。

4 結(jié)論
與傳統(tǒng)的伺服控制系統(tǒng)相比,基于DSP的數(shù)字伺服機(jī)構(gòu)控制系統(tǒng)既有數(shù)字系統(tǒng)精度高,、靈活性強(qiáng)的優(yōu)點,,又充分發(fā)揮了無刷直流電機(jī)可靠性高、快速性好的優(yōu)點,,大幅提升了伺服系統(tǒng)的整體性能,。同時該系統(tǒng)的建模、仿真,、測試,、維修等與傳統(tǒng)伺服控制系統(tǒng)相比更加快捷、有效,,具有較高的工程應(yīng)用價值,。該伺服控制系統(tǒng)可以同時控制多個直流無刷電機(jī)同時工作,已在某型伺服機(jī)構(gòu)中驗證并應(yīng)用,。
