
摘要:關(guān)鍵詞:類別:射頻微波測試頭條
超聲波由于其指向性強(qiáng),、能量消耗緩慢,、傳播距離較遠(yuǎn)等優(yōu)點(diǎn),,而經(jīng)常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實(shí)現(xiàn),。超聲波測距主要應(yīng)用于倒車?yán)走_(dá),、建筑施工工地以及一些工業(yè)現(xiàn)場。例如:液位,、井深,、管道長度等場合。利用超聲波檢測往往比較迅速,、方便,、計(jì)算簡單、易于做到實(shí)時(shí)控制,,并且在測量精度方面能達(dá)到工業(yè)實(shí)用的要求,,因此在測控系統(tǒng)的研制上也得到了廣泛的應(yīng)用。本文介紹一種以AT89C51單片機(jī)為核心的低成本,、高精度,、微型化數(shù)字顯示超聲波測距儀的硬件電路和軟件設(shè)計(jì)方法。
1 超聲波測距原理
1.1 超聲波發(fā)生器
超聲波是一種頻率超過20kHz的機(jī)械波,。為了研究和利用超聲波,,人們已經(jīng)設(shè)計(jì)和制成了許多超聲波發(fā)生器??傮w上講,,超聲波發(fā)生器可以分為兩大類:一類是用電氣方式產(chǎn)生超聲波。一類是用機(jī)械方式產(chǎn)生超聲波,。電氣方式包括壓電型,、磁致伸縮型和電動(dòng)型等;機(jī)械方式有加爾統(tǒng)笛,、液哨和氣流旋笛等,。
它們所產(chǎn)生的超聲波的頻率、功率和聲波特性各不相同,。
因而用途也各不相同,。目前較為常用的是壓電式超聲波發(fā)生器。
1.2 壓電式超聲波發(fā)生器原理
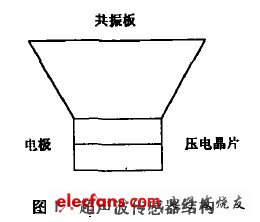
壓電式超聲波發(fā)生器實(shí)際上是利用壓電晶體的諧振來工作的,。超聲波發(fā)生器內(nèi)部結(jié)構(gòu)如圖1所示,。它有兩個(gè)壓電晶片和一個(gè)共振板,。發(fā)射超聲波時(shí),壓電傳感器中的壓電晶片受發(fā)射電脈沖激勵(lì)后產(chǎn)生共振,,并帶動(dòng)共振板振動(dòng),,便產(chǎn)生超聲波。接收超聲波時(shí),,兩電極間未外加電,,共振波接收到超聲波,將壓迫壓電晶片作振動(dòng)將機(jī)械能轉(zhuǎn)換為電信號(hào),。
1.3 超聲波測距原理
超聲測距從原理上可分為共振式,、脈沖反射式兩種。由于共振法的應(yīng)用要求復(fù)雜,。在這里使用脈沖反射式,。
超聲波測距原理是通過超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射時(shí)刻的同時(shí)開始計(jì)時(shí),。超聲波在空氣中傳播,。途中碰到障礙物就立即返回來。超聲波接收器收到反射波就立即停止計(jì)時(shí),。超聲波在空氣中的傳播速度為C,,而根據(jù)計(jì)時(shí)器記錄的測出發(fā)射和接收回波的時(shí)間差t。就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離s.即:S:Ct/2,。這就是所謂的時(shí)間差測距法,。由于超聲波也是一種聲波。其聲速c與溫度有關(guān),。表1列出了幾種不同溫度下的聲速,。在使用時(shí),如果溫度變化不大,。則可認(rèn)為聲速是基本不變的,。如果測距精度要求很高,則應(yīng)通過溫度補(bǔ)償?shù)姆椒右孕U?/p>
聲速確定后,,只要測得超聲波往返的時(shí)間,,即可求得距離。這就是超聲波測距系統(tǒng)的機(jī)理,。
2 系統(tǒng)硬件電路設(shè)計(jì)
ATMEL公司的AT89C51單片機(jī),,是一種低功耗,、高性能的,、片內(nèi)含有4KB Flash ROM 的8位CMOS單片機(jī),工作電壓范圍為2.7~6V(實(shí)際使用十5V供電),。
位數(shù)據(jù)總線,。它有一個(gè)可編程的全雙工串行通信接El,,能同時(shí)進(jìn)行串行發(fā)送和接收0通過RXD引腳(串行數(shù)據(jù)接收端)和TXD引腳(串行數(shù)據(jù)發(fā)送端)與外界進(jìn)行通信。本超聲波測距系統(tǒng)以的AT89C51為中央處理器,,其系統(tǒng)原理框圖如圖2所示,。
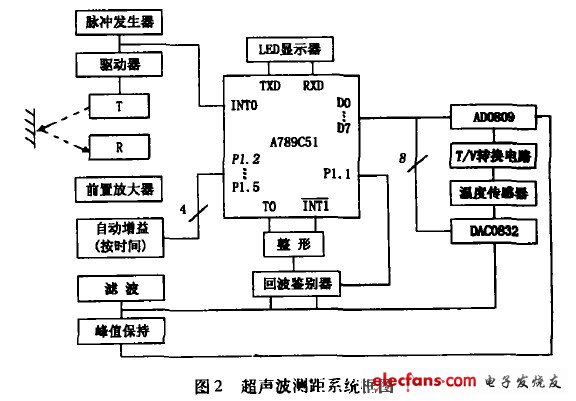
系統(tǒng)上電工作后,由脈沖發(fā)生器發(fā)出以脈沖信號(hào),,該脈沖信號(hào)一方面通過驅(qū)動(dòng)的電路推動(dòng)脈沖發(fā)生器發(fā)出超聲波脈沖,,另一方面,觸發(fā)AT89C51內(nèi)部定時(shí)器T1(由外部中斷INT0實(shí)現(xiàn))開始定時(shí),;同時(shí)由AT89C51控制按時(shí)間自動(dòng)改變放大其增益,,即按發(fā)射波未到達(dá)接收器的傳播時(shí)問逐漸增大放大器增益。接收到的超身回波經(jīng)過發(fā)大,、濾波后,,一是直接送給鑒幅器,二是經(jīng)峰值保持電路提取回波峰值作為閾值的基準(zhǔn)信息,。AT89C51通過ADC0809采樣回波峰值,,經(jīng)過軟件加權(quán)處理后作為鑒別閾值,再經(jīng)過DAC0832送給鑒幅器,。當(dāng)回波包絡(luò)中某個(gè)波被鑒別出來時(shí),,則立即觸發(fā)外部中斷INT1關(guān)閉定時(shí)器T1,同時(shí),,P1.1設(shè)置檢測窗口,;由TO計(jì)數(shù)器窗口內(nèi)鑒別回波個(gè)數(shù)12,根據(jù)n確定下次鑒別給定值的大小,,閉環(huán)控制至n≤5為止,。然后從補(bǔ)償值表中取出與rl對(duì)應(yīng)的補(bǔ)償值,對(duì)T1的計(jì)時(shí)時(shí)問(實(shí)際上這是從發(fā)射超身波到接收到第一個(gè)鑒別回波之問的計(jì)數(shù)值,,計(jì)數(shù)周期為lUS,,12M品振)進(jìn)行修正,獲得超聲波實(shí)際的往復(fù)傳播時(shí)問,,再通過3字節(jié)浮點(diǎn)運(yùn)算求出距離,,由AT89C51串行通信口送LED顯示。本系統(tǒng)每隔5s采樣一次環(huán)境溫度,,以修正聲速,,所以在系統(tǒng)還可以加入溫度傳感器來監(jiān)測環(huán)境溫度,把表l所列的數(shù)據(jù)做到程序中可進(jìn)行溫度補(bǔ)償,。
3 補(bǔ)償及測距原理
不同形狀和位置的對(duì)象物,,其回波波形大致,只是波幅不通,。于是,,該系統(tǒng)采用了變閾值鑒幅固定補(bǔ)償法:
(1)采用微處理器閉環(huán)控制自動(dòng)改變閾值,;
(2)在超聲回波中鑒別其包絡(luò)峰附近少于6個(gè)波的第一個(gè)波,形成關(guān)閉定時(shí)器的觸發(fā)信號(hào),,并同時(shí)設(shè)置檢測窗口,;
(3)計(jì)數(shù)檢測窗口內(nèi)的鑒別回波格式n(鑒別回波=窗口內(nèi)鑒別回波數(shù)+1)個(gè);
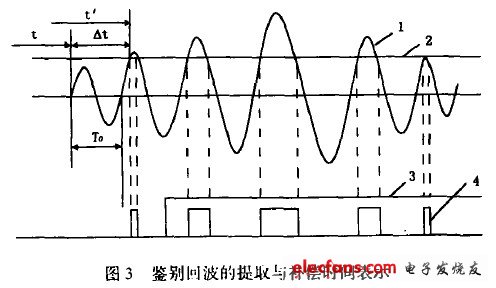
(4)判斷n的大小,,若n>5,,則減小鑒別規(guī)定閾值,轉(zhuǎn)到(2)重新檢測,。 若≤5,,則從先驗(yàn)的固定補(bǔ)償值表中取出與n相對(duì)應(yīng)的補(bǔ)償值進(jìn)行修正一其鑒別回波提取及補(bǔ)償時(shí)間表示如圖3所示。
補(bǔ)償修正公式:

可見,,不同的At對(duì)應(yīng)不同,,作為先驗(yàn)數(shù)據(jù)先通過實(shí)際測試、觀察得到,,建立補(bǔ)償值表存在存儲(chǔ)器中,。
本超聲波測距系統(tǒng)的誤差主要由系統(tǒng)誤差、環(huán)境誤差,、檢測誤差,、定時(shí)時(shí)間誤差,、補(bǔ)償時(shí)間誤差等組成,。該系統(tǒng)采用變閉值固定補(bǔ)償法后,,可以補(bǔ)償時(shí)間誤差較小,。
提高了檢測信號(hào)的S/N比,從而提高了超身波測距的精度和范圍,。
4 超聲波測距系統(tǒng)的軟件設(shè)計(jì)
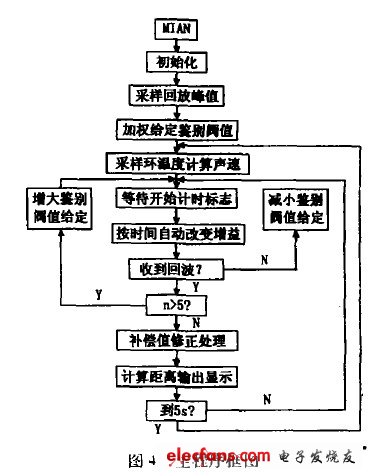
AT89C51單片機(jī)和其開發(fā)應(yīng)用系統(tǒng)具有語言簡潔,、可移植性好,、表達(dá)能力強(qiáng),、表達(dá)方式靈活,、可進(jìn)行結(jié)構(gòu)化設(shè)計(jì)、可以直接控制計(jì)算機(jī)硬件,、生成代碼質(zhì)量高,、使用方便等諸多優(yōu)點(diǎn)。超聲波測距儀就是用A F89C51單片機(jī)開發(fā)設(shè)計(jì)的,。它采用模塊化設(shè)計(jì),,由主程序、定時(shí)干程序,、顯示子程序等模塊組成,。在此給出主程序框框圖。如圖4所示。
5 結(jié)論
對(duì)固定材料,、結(jié)構(gòu)的超聲波傳感器,,其檢測波特性不變,,即再發(fā)射傳感在同一激勵(lì)電壓源作用下發(fā)射超身波,,其反射波的波形變化規(guī)律,不會(huì)因?yàn)閷?duì)象物類型,,距離的改變而變化,,只是波幅不同而已。故該系統(tǒng)采用了變閾值鑒幅固定補(bǔ)償法,,減小了誤差,,從而提高了測距精度。該系統(tǒng)發(fā)射脈沖電壓為20V,,對(duì)平面物體做了多次測量發(fā)現(xiàn),,測距范圍為10m,測距精度為0.2%,??梢娀趩纹瑱C(jī)設(shè)計(jì)的超聲波測距系統(tǒng)具有硬件結(jié)構(gòu)簡單、工作可靠,、測量誤差小等特點(diǎn),。
因此,它不僅可用于移動(dòng)機(jī)器人,,還可用在其它檢測系統(tǒng)中,。