樓宇監(jiān)測(cè)是樓宇智能化的重要組成部分,主要是針對(duì)樓宇出入口、內(nèi)部過道以及一些重要場(chǎng)所進(jìn)行監(jiān)測(cè),特別是在無人值守的情況下。能夠自動(dòng)監(jiān)測(cè)人員進(jìn)入樓宇和重要場(chǎng)所情況。在必要情況下,能夠采集進(jìn)入這些場(chǎng)所人員的圖像、聲音等信息,自動(dòng)報(bào)警。樓宇監(jiān)測(cè)系統(tǒng)要求無人值守、網(wǎng)絡(luò)化、便于操作和管理、系統(tǒng)成本低廉、能夠自動(dòng)報(bào)警并且自動(dòng)收集到相關(guān)的信息。現(xiàn)有的監(jiān)測(cè)系統(tǒng)多數(shù)通過有線方式進(jìn)行數(shù)據(jù)傳輸,成本普遍比較高,通常高達(dá)幾萬元甚至幾十萬元,且維護(hù)困難,擴(kuò)展性差。
ZigBee 技術(shù)(也稱之為802.15.4 標(biāo)準(zhǔn))是一種近距離、低復(fù)雜度、低功耗、低數(shù)據(jù)速率、低成本、高容量的無線傳感網(wǎng)絡(luò)技術(shù),主要適合于承載數(shù)據(jù)流量較小的業(yè)務(wù)。相對(duì)于現(xiàn)有的各種無線通信技術(shù),ZigBee技術(shù)是最低功耗和成本的技術(shù)。而與ZigBee 技術(shù)相反,WiFi(Wireless Fidelity, 也稱之為802.11 標(biāo)準(zhǔn))是一種遠(yuǎn)距離、復(fù)雜度較高、高功耗、高數(shù)據(jù)速率(達(dá)54Mbps)、高成本的無線網(wǎng)絡(luò)技術(shù)。目前在無線局域網(wǎng)中得到了較為廣泛的應(yīng)用,十分便于接入Internet.
可見基于ZigBee 技術(shù)的無線傳感器網(wǎng)絡(luò)具有可快速部署、隱蔽性強(qiáng)、成本低、無人值守等優(yōu)點(diǎn),十分適合于樓宇監(jiān)測(cè)的應(yīng)用。但是,由于Zig-Bee 技術(shù)是一種低數(shù)據(jù)速率的無線傳輸技術(shù),它一般傳輸?shù)臄?shù)據(jù)量較小,而在樓宇監(jiān)測(cè)系統(tǒng)中,除了監(jiān)測(cè)是否有人員進(jìn)入樓宇和重要場(chǎng)所之外,還需要采集和傳輸數(shù)據(jù)量較大的圖像、聲音等信息。這對(duì)于ZigBee 技術(shù)是個(gè)難點(diǎn),很難完成,但是對(duì)于WiFi 則易如反掌。因此,為了滿足樓宇監(jiān)測(cè)系統(tǒng)的具體需要,我們可以將ZigBee 技術(shù)和WiFi 技術(shù)相結(jié)合,構(gòu)建一個(gè)技術(shù)ZigBee 和WiFi 相結(jié)合的樓宇監(jiān)測(cè)系統(tǒng)。利用ZigBee 技術(shù)組建無線傳感器監(jiān)測(cè)網(wǎng)絡(luò),監(jiān)測(cè)和報(bào)警人員進(jìn)入情況,傳輸小數(shù)據(jù)量的監(jiān)測(cè)活動(dòng)信息; 利用WiFi 技術(shù)組建無線監(jiān)測(cè)局域網(wǎng)絡(luò),根據(jù)無線傳感器監(jiān)測(cè)網(wǎng)絡(luò)監(jiān)測(cè)的情況采集相關(guān)的圖像或聲音信息,傳輸大數(shù)據(jù)量的監(jiān)測(cè)活動(dòng)信息。
1 監(jiān)測(cè)系統(tǒng)體系結(jié)構(gòu)
根據(jù)上述對(duì)樓宇監(jiān)測(cè)系統(tǒng)的要求以及ZigBee技術(shù)和WiFi 技術(shù)的特點(diǎn)分析,提出了一種基于ZigBee 技術(shù)和WiFi 技術(shù)相結(jié)合的樓宇監(jiān)測(cè)系統(tǒng),其體系結(jié)構(gòu)如圖1 所示。樓宇某層的網(wǎng)絡(luò)布局如圖2 所示,其中O(0, 0)表示坐標(biāo)原點(diǎn)。
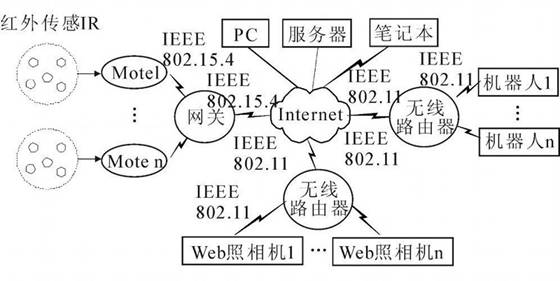
圖1 樓宇監(jiān)測(cè)體系結(jié)構(gòu)

圖2 樓宇某層網(wǎng)絡(luò)布局圖
本系統(tǒng)由4個(gè)部分組成:①基于ZigBee 技術(shù)的無線傳感器網(wǎng)絡(luò)子系統(tǒng);②基于WiFi 技術(shù)的機(jī)器人子系統(tǒng);③基于WiFi 技術(shù)的攝像監(jiān)視子系統(tǒng); ④監(jiān)控中心子系統(tǒng)。
其中,基于ZigBee 技術(shù)的無線傳感器網(wǎng)絡(luò)子系統(tǒng)由若干個(gè)紅外傳感檢測(cè)器(IR)、音頻傳感檢測(cè)器、匯集節(jié)點(diǎn)Mo te 和網(wǎng)關(guān)T mo te 組成。IR 被安裝到樓宇進(jìn)出口和重要場(chǎng)所,每臨近的5 個(gè)檢測(cè)器匯集到一個(gè)匯集節(jié)點(diǎn)Mote.匯集節(jié)點(diǎn)采用由美國克爾斯博科技(CrossBow )公司開發(fā)和生產(chǎn)的無線傳感設(shè)備Mote, 該節(jié)點(diǎn)由處理器和RF 芯片構(gòu)成。
該子系統(tǒng)主要負(fù)責(zé)監(jiān)視人員進(jìn)入樓宇和重要場(chǎng)所的活動(dòng)情況,當(dāng)有人員進(jìn)入IR 的監(jiān)測(cè)范圍時(shí),IR便將監(jiān)測(cè)數(shù)據(jù)發(fā)送給與它相連接的Mo te, 然后通過網(wǎng)關(guān)T mote 上報(bào)給監(jiān)控子系統(tǒng)。在監(jiān)控子系統(tǒng)中可以將這些監(jiān)測(cè)數(shù)據(jù)存入數(shù)據(jù)庫,同時(shí)對(duì)一些重要場(chǎng)所設(shè)置告警規(guī)則,當(dāng)規(guī)測(cè)滿足時(shí),觸發(fā)告警。
圖2 樓宇某層網(wǎng)絡(luò)布局圖基于WiFi 技術(shù)的機(jī)器人子系統(tǒng)由若干個(gè)機(jī)器人和無線網(wǎng)絡(luò)接入節(jié)點(diǎn)(無線路由器)組成。該子系統(tǒng)主要負(fù)責(zé)對(duì)重要場(chǎng)所的侵入活動(dòng)進(jìn)行跟蹤。當(dāng)監(jiān)控中心子系統(tǒng)觸發(fā)告警后,通過WiFi 通信技術(shù)給機(jī)器人發(fā)送命令,指揮機(jī)器人到指定的位置進(jìn)行跟蹤,采集相關(guān)的圖像和音頻信息,并將這些信息反饋到監(jiān)控中心顯示/ 播放和存檔。本系統(tǒng)中的機(jī)器人采用加拿大Dr. Ro bo t 公司設(shè)計(jì)和開發(fā)的智能無線機(jī)器人X80 系列WiRobot (該機(jī)器人配備有超聲波傳感器3 個(gè)、紅外距離傳感器7 個(gè)、人體傳感監(jiān)測(cè)器2 個(gè)、攝像頭1 個(gè)、音頻播放器1 個(gè))。
無線網(wǎng)絡(luò)接入節(jié)點(diǎn)采用D- Link 公司生產(chǎn)的無線路由器。
基于WiFi 技術(shù)的攝像監(jiān)視子系統(tǒng)由若干個(gè)Web 照相機(jī)和無線網(wǎng)絡(luò)接入節(jié)點(diǎn)(無線路由器)組成。Web 照相機(jī)被安裝到樓宇進(jìn)出口和重要場(chǎng)所,能夠?qū)ΡO(jiān)視范圍內(nèi)的活動(dòng)情況進(jìn)行拍照,并將照片通過無線網(wǎng)絡(luò)接入節(jié)點(diǎn)發(fā)送到監(jiān)控中心進(jìn)行顯示和存檔。本系統(tǒng)中的Web 照相機(jī)采用D-Link 公司生產(chǎn)的DCS-G900 照相機(jī)。
監(jiān)控中心子系統(tǒng)由服務(wù)器、PC、筆記本電腦等組成。該子系統(tǒng)主要負(fù)責(zé)對(duì)整個(gè)監(jiān)測(cè)系統(tǒng)進(jìn)行調(diào)度、控制、數(shù)據(jù)處理和存儲(chǔ)。監(jiān)控中心子系統(tǒng)中的設(shè)備可以通過有線,也可以通過WiFi 無線接入網(wǎng)絡(luò)。
2 關(guān)鍵技術(shù)
基于ZigBee和WiFi相結(jié)合的樓宇監(jiān)測(cè)系統(tǒng)中涉及到的關(guān)鍵技術(shù)主要有傳感數(shù)據(jù)的采集、傳感器節(jié)點(diǎn)能量的節(jié)省、坐標(biāo)系統(tǒng)的建立以及機(jī)器人的控制。
2. 1 傳感數(shù)據(jù)的采集
傳感數(shù)據(jù)采集是本系統(tǒng)中最為基礎(chǔ)的功能,是系統(tǒng)處理的數(shù)據(jù)來源和控制基礎(chǔ)。本系統(tǒng)中采用的匯集傳感器節(jié)點(diǎn)是由克爾斯博科技(CrossBow )公司開發(fā)和生產(chǎn)的無線傳感設(shè)備Mo te, 該節(jié)點(diǎn)是在TinyOS 支持之下進(jìn)行數(shù)據(jù)采集和通信工作。TinyOS是美國加州大學(xué)伯克利分校專門針對(duì)傳感器網(wǎng)絡(luò)特點(diǎn)而設(shè)計(jì)的操作系統(tǒng)。TinyOS 使用高效的基于事件的執(zhí)行方式,包含經(jīng)過特殊設(shè)計(jì)的組建模型,成為高效率的模塊化和易于構(gòu)造的組件型應(yīng)用軟件。在TinyOS 中,通過nesC 語言表達(dá)組件以及組件之間的事件/ 命令接口。
本系統(tǒng)中的傳感數(shù)據(jù)的采集和傳輸也是在TinyOS 基礎(chǔ)之上進(jìn)行設(shè)計(jì)和開發(fā)的。利用nesC應(yīng)用程序框架和各種組件開發(fā)了數(shù)據(jù)采集和數(shù)據(jù)傳輸功能模塊,并將采集的數(shù)據(jù)在監(jiān)控中心實(shí)時(shí)顯示和入庫存儲(chǔ)。為了便于數(shù)據(jù)的采集和識(shí)別,在監(jiān)控中心的服務(wù)器中預(yù)先給每個(gè)傳感器IR 分配一個(gè)惟一的標(biāo)識(shí)(ID), 通過該ID 指示傳感器的位置。如圖2 所示的傳感器布局中,共布局了45 個(gè)IR 傳感器,根據(jù)每臨近的5 個(gè)IR 匯集為的原則,分別分配ID 號(hào)為11, 12, 13, 14, 15, 21, 22, ,,,91, 92, 93, 94, 95. 為了盡量節(jié)省傳感器的能量,傳感器IR 采用休眠工作機(jī)制,即當(dāng)沒有數(shù)據(jù)需要發(fā)送時(shí),傳感器IR 處于休眠狀態(tài),當(dāng)需要發(fā)送數(shù)據(jù)時(shí),IR 被喚醒并傳送數(shù)據(jù)。IR 檢測(cè)和傳送數(shù)據(jù)采用基于事件驅(qū)動(dòng)方式,傳感器IR 檢測(cè)到人員活動(dòng)時(shí),將它的ID 通過匯集節(jié)點(diǎn)Mote 和網(wǎng)關(guān)T mo te傳送到監(jiān)控中心的數(shù)據(jù)采集模塊。數(shù)據(jù)采集模塊接收到該ID 后,提取當(dāng)前的系統(tǒng)時(shí)間,然后將ID 和當(dāng)前的系統(tǒng)時(shí)間實(shí)時(shí)顯示并存入數(shù)據(jù)庫。
在一個(gè)樓宇中可能有一些重要區(qū)域(或稱之為禁區(qū)), 當(dāng)檢測(cè)到某個(gè)禁區(qū)出現(xiàn)人員活動(dòng)時(shí),檢測(cè)中心應(yīng)當(dāng)自動(dòng)發(fā)出告警信息。為此,首先需要在該禁區(qū)安裝若干個(gè)傳感器IR, 如圖2 所示禁區(qū)316 中的5 個(gè)IR. 然后在監(jiān)控中心的服務(wù)器中預(yù)先將該禁區(qū)與該禁區(qū)中安裝的所有傳感器IR 的ID 進(jìn)行關(guān)聯(lián),并設(shè)置告警條件。當(dāng)處于該禁區(qū)所有IR 中的任何一個(gè)檢測(cè)到人員活動(dòng)時(shí),立即將該ID 以及當(dāng)前的系統(tǒng)時(shí)間實(shí)時(shí)顯示并存入數(shù)據(jù)庫,同時(shí)通過聲音、顏色發(fā)布告警。
2. 2 基于能量均衡的分簇多跳路由
當(dāng)樓宇中多層樓道的傳感器節(jié)點(diǎn)組成一個(gè)規(guī)模較大的傳感器網(wǎng)絡(luò)時(shí),傳感數(shù)據(jù)往往需要經(jīng)過多個(gè)中間節(jié)點(diǎn)(簇頭)的轉(zhuǎn)發(fā)才能到達(dá)網(wǎng)關(guān),再通過網(wǎng)關(guān)發(fā)送到監(jiān)控中心。由于傳感器中間節(jié)點(diǎn)的能量有限, 盡量降低傳感器中間節(jié)點(diǎn)的能量消耗。提高網(wǎng)絡(luò)的生存周期是無線傳感器網(wǎng)絡(luò)必須重點(diǎn)考慮和解決的問題。 將傳感器網(wǎng)絡(luò)的能量消耗分為有用能耗和無用能耗。有用能耗包括傳數(shù)據(jù)輸/ 接收、數(shù)據(jù)處理、數(shù)據(jù)查詢等; 無用能耗主要有空閑偵聽、數(shù)據(jù)重傳、額外開銷以及產(chǎn)生和處理控制包。高效的路由算法能夠較好的降低數(shù)據(jù)傳輸/接收能量消耗。
系統(tǒng)一個(gè)方面通過休眠機(jī)制, 使傳感器節(jié)點(diǎn)在無數(shù)據(jù)傳輸時(shí)處于休眠來降低節(jié)點(diǎn)的能量消耗。
同時(shí)由于充當(dāng)簇頭節(jié)點(diǎn)的能量消耗遠(yuǎn)遠(yuǎn)高于其他的節(jié)點(diǎn),為了提高整個(gè)網(wǎng)絡(luò)的整體生存期,提出了一種基于能量均衡的分簇多跳路由算法。算法的基本思想是將若干個(gè)節(jié)點(diǎn)劃分為一個(gè)簇,定時(shí)評(píng)估簇內(nèi)各個(gè)節(jié)點(diǎn)的剩余能量。根據(jù)能量評(píng)估結(jié)果,使剩余能量最多的節(jié)點(diǎn)充當(dāng)簇頭,即定時(shí)動(dòng)態(tài)產(chǎn)生簇頭,使簇內(nèi)各個(gè)節(jié)點(diǎn)輪值充當(dāng)簇頭,從而避免長(zhǎng)期讓某個(gè)節(jié)點(diǎn)充當(dāng)簇頭將能量耗盡后無法工作的現(xiàn)象發(fā)生。該算法相對(duì)于其他的相關(guān)算法具有簡(jiǎn)單、易于實(shí)現(xiàn)、高效的特點(diǎn)。
2. 3 坐標(biāo)系統(tǒng)構(gòu)建
本系統(tǒng)需要建立兩個(gè)坐標(biāo)系統(tǒng),一個(gè)是傳感器布局實(shí)際空間坐標(biāo)系統(tǒng),該坐標(biāo)系統(tǒng)主要用于控制機(jī)器人的移動(dòng)以及指示告警位置。另一個(gè)坐標(biāo)系統(tǒng)是屏幕圖形顯示坐標(biāo)系統(tǒng),主要用于屏幕以圖形方式顯示傳感器布局和告警點(diǎn)。
在傳感器布局實(shí)際空間坐標(biāo)系統(tǒng)中需要標(biāo)識(shí)的對(duì)象主要包括三個(gè)方面: 傳感器的位置、重要場(chǎng)所的位置以及特殊標(biāo)識(shí)物的位置。
如前所述,由于預(yù)先將每個(gè)傳感器編制了惟一的ID, 于是可以根據(jù)坐標(biāo)原點(diǎn)O(0, 0)預(yù)先測(cè)量確定傳感器IR 的坐標(biāo)位置,然后建立傳感器ID 與傳感器位置信息的配置表。因此,當(dāng)某個(gè)傳感器報(bào)警時(shí),利用該傳感器的ID 通過查表可以確定報(bào)警點(diǎn)的位置。
重要場(chǎng)所(禁區(qū))的位置信息原則上可以通過安裝在該場(chǎng)所中傳感器的ID 來指示,但是由于需要控制機(jī)器人對(duì)該場(chǎng)所進(jìn)行跟蹤監(jiān)視,實(shí)際上是對(duì)某區(qū)域范圍中的可疑人員進(jìn)行跟蹤監(jiān)視。因此嚴(yán)格的說需要的是該場(chǎng)所的位置信息(確切的說是進(jìn)入該場(chǎng)所入口的位置信息), 而不是場(chǎng)所中傳感器的位置信息。所以,可以將一些重要場(chǎng)所的位置信息預(yù)先在坐標(biāo)系統(tǒng)中標(biāo)出,并且建立場(chǎng)所中所有傳感器與該場(chǎng)所入口的位置信息對(duì)應(yīng)表。當(dāng)該場(chǎng)所中任何一個(gè)傳感器報(bào)警時(shí),通過查找對(duì)應(yīng)表,給出該場(chǎng)所入口的位置信息。如圖2 所示,當(dāng)確定坐標(biāo)原點(diǎn)O(0, 0)的位置后,通過測(cè)量,可以預(yù)先獲得一些重要場(chǎng)所的坐標(biāo)信息。如: 302A 的坐標(biāo)信息是(-182, 697); 302 的是(- 939, 1302); 329 的是(2393,1606); 330 的是(2121, 1303 ); 316 的是(1545,1698). 坐標(biāo)信息的單位是厘米,因此根據(jù)該坐標(biāo)系統(tǒng)控制機(jī)器人的移動(dòng),精確度可以達(dá)到1 厘米。
特殊標(biāo)識(shí)物是用于控制機(jī)器人的一些輔助性標(biāo)識(shí)。由于WiRobot X80 自身沒有位置定位裝置,但是在控制機(jī)器人移動(dòng)的過程中,需要及時(shí)掌握機(jī)器人的當(dāng)前位置,因此通過坐標(biāo)系統(tǒng)和特殊標(biāo)識(shí)物來解決這個(gè)問題。如圖2 所示墻壁1 和墻壁2 可用作特殊標(biāo)識(shí)物,當(dāng)控制機(jī)器人進(jìn)入320, 330, 316 等房間時(shí),需要利用墻壁1 作為標(biāo)識(shí),指示控制機(jī)器人轉(zhuǎn)向。當(dāng)控制機(jī)器人進(jìn)入329 房間時(shí),需要利用墻壁1 和墻壁2 作為標(biāo)識(shí)。根據(jù)圖2 中的位置,墻壁1 和墻壁2 的位置信息是: 墻壁1 (* * * ,1667). 由于利用墻壁1 控制機(jī)器人的轉(zhuǎn)動(dòng),只是關(guān)心它與原點(diǎn)的Y 值,而不關(guān)心它的X 值。墻壁2(2363, * * * ), 同理,只是關(guān)心它與原點(diǎn)的X 值,而不關(guān)心它的Y 值。
例如,當(dāng)需要控制機(jī)器人進(jìn)入316 房間,程序的控制規(guī)程是根據(jù)316 的坐標(biāo)信息(1545, 1698)驅(qū)動(dòng)機(jī)器人從原點(diǎn)O(0, 0)出發(fā),一直前行,直至到達(dá)墻壁1(通過機(jī)器人的紅外傳感可以檢測(cè)到), 然后控制機(jī)器人90b右轉(zhuǎn),當(dāng)X 值達(dá)到1545 時(shí),控制機(jī)器人90b左轉(zhuǎn)進(jìn)入316 房間。
系統(tǒng)以圖形界面方式顯示傳感器布局、機(jī)器人的實(shí)時(shí)移動(dòng)路線以及顯示告警點(diǎn),因此還需要建立一個(gè)圖形界面坐標(biāo)系統(tǒng)。為了保持顯示圖形能夠與實(shí)際傳感器布局以及告警點(diǎn)一致,與機(jī)器人的移動(dòng)同步,需要將傳感器布局實(shí)際空間坐標(biāo)系統(tǒng)與圖形界面坐標(biāo)系統(tǒng)映射。具體方法是當(dāng)進(jìn)行圖形顯示時(shí),將實(shí)際空間坐標(biāo)系統(tǒng)中的坐標(biāo)值映射為圖形界面中的坐標(biāo)值,按照?qǐng)D形界面中的坐標(biāo)值進(jìn)行畫圖顯示。當(dāng)圖形被放大/ 縮小時(shí),按照?qǐng)D形放大/ 縮小的比例因子重新計(jì)算被映射的坐標(biāo)值。為了保證系統(tǒng)的靈活性,我們開發(fā)了坐標(biāo)系統(tǒng)映射配置功能,用戶可以預(yù)先輸入實(shí)際空間坐標(biāo)系統(tǒng)中的傳感器、重要場(chǎng)所、特殊標(biāo)識(shí)物以及原點(diǎn)等的坐標(biāo)信息。系統(tǒng)能夠?qū)⑦@些坐標(biāo)信息直接映射為圖形界面中的坐標(biāo)值。當(dāng)需要新增加禁區(qū)、特殊標(biāo)識(shí)物、新增或移動(dòng)傳感器節(jié)點(diǎn)時(shí),只需要重新配置這些點(diǎn)的坐標(biāo)信息即可,而不需要修改系統(tǒng)軟件部分。
2. 4 機(jī)器人的控制
基于WiFi 技術(shù)的機(jī)器人子系統(tǒng)主要負(fù)責(zé)對(duì)重要場(chǎng)所的侵入活動(dòng)進(jìn)行跟蹤。當(dāng)監(jiān)控中心子系統(tǒng)觸發(fā)告警后,通過WiFi 通信技術(shù)給機(jī)器人發(fā)送命令,指揮機(jī)器人到指定的位置進(jìn)行跟蹤,采集相關(guān)的圖像和音頻信息,并將這些信息反饋到監(jiān)控中心顯示/ 播放和存檔。
1)機(jī)器人的驅(qū)動(dòng)。
機(jī)器人按照給定的速度前進(jìn)(假定速度為Vcm/ s), 前進(jìn)時(shí)間t 秒,可以計(jì)算出它移動(dòng)的距離d= v* t . 這樣在實(shí)際空間坐標(biāo)系統(tǒng)中我們可以確定機(jī)器人的當(dāng)前位置,從而可以控制機(jī)器人順利到達(dá)目的地。但是實(shí)際情況較為復(fù)雜,在機(jī)器人前進(jìn)的過程中,機(jī)器人可能不是完全走直線,也可能走成斜線,如圖3 所示。這樣根據(jù)速度和時(shí)間計(jì)算出來的d 值與坐標(biāo)系統(tǒng)中的實(shí)際Y 值之間存在偏差,而且偏差值可能較大。為了解決該問題,我們可以根據(jù)d 和Y 計(jì)算得到偏移的x 值,然后對(duì)坐標(biāo)X 值進(jìn)行矯正。實(shí)際上,通過反復(fù)試驗(yàn)發(fā)現(xiàn),如果當(dāng)機(jī)器人在原點(diǎn)時(shí)的前進(jìn)方向剛好垂直于特殊標(biāo)識(shí)物墻壁1, 偏移值x 很小(偏移量< 3% ), 可以忽略。當(dāng)然,在原點(diǎn)時(shí)的讓機(jī)器人的前進(jìn)方向剛好垂直于特殊標(biāo)識(shí)物墻壁1 是很困難的。
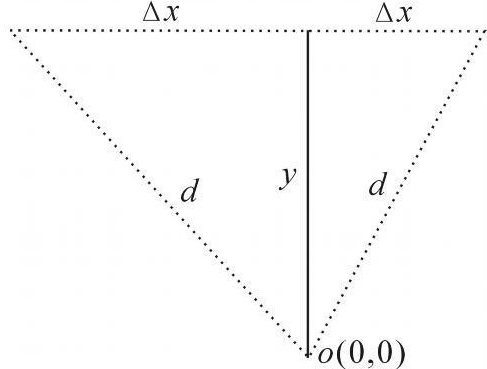
圖3 機(jī)器人可能行進(jìn)的實(shí)際路線
如上述控制機(jī)器人進(jìn)入316 房間的例子中,假定當(dāng)機(jī)器人在原點(diǎn)時(shí)的前進(jìn)方向剛好垂直于特殊標(biāo)識(shí)物墻壁1. 如果考慮到實(shí)際可能存在的偏差,則程序的控制規(guī)程是,根據(jù)316 的坐標(biāo)信息(1545, 1698)驅(qū)動(dòng)機(jī)器人從原點(diǎn)O(0, 0)出發(fā),同時(shí)開始計(jì)時(shí),一直前行,直至到達(dá)墻壁1(通過機(jī)器人的紅外傳感可以檢測(cè)到). 此時(shí)根據(jù)機(jī)器人實(shí)際行進(jìn)的距離d 和已知的墻壁1 距離原點(diǎn)的垂直距離Y 值(1667), 計(jì)算出偏移值x . 同時(shí)比較機(jī)器人前方左右端兩個(gè)紅外傳感檢測(cè)值,可以判斷出是偏移正向的x , 還是偏移負(fù)向的x . 將機(jī)器人當(dāng)前的位置設(shè)定為(x , 1667), 然后控制機(jī)器人90b右轉(zhuǎn),當(dāng)X 值達(dá)到1545 時(shí),控制機(jī)器人90b左轉(zhuǎn),繼續(xù)前行31 cm(1698~ 1667)進(jìn)入316 房間。
2)障礙物的避讓。
控制機(jī)器人前行的過程中可能遇到障礙物。因此,需要控制機(jī)器人自動(dòng)檢測(cè)和自動(dòng)避讓障礙物。
障礙物的自動(dòng)檢測(cè)比較簡(jiǎn)單,利用機(jī)器人上配置的超聲波傳感器或紅外傳感器以及WiRobotSDK 提供的API 可以實(shí)現(xiàn)。本軟件系統(tǒng)采用紅外傳感器以及WiRobo tSDK 提供的API 來實(shí)現(xiàn),通過獲取機(jī)器人前端、左、右各個(gè)紅外傳感器的檢測(cè)值,可以分別判斷出在前方、左、右是否存在障礙物。
控制機(jī)器人避讓障礙物則較為復(fù)雜,主要是需要重新計(jì)算坐標(biāo)值。設(shè)計(jì)和實(shí)現(xiàn)的機(jī)器人躲避障礙物控制流程如圖4 所示。
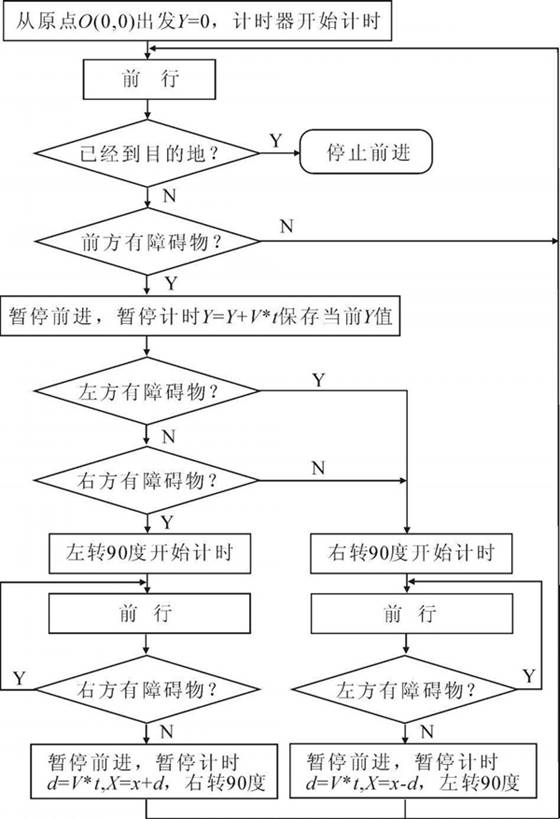
圖4 機(jī)器人躲避障礙物流程圖
當(dāng)機(jī)器人在前行的過程中檢測(cè)到前方出現(xiàn)障礙物時(shí),停止機(jī)器人的前進(jìn),繼續(xù)檢測(cè)左、右方是否也存在障礙物。①如果左方存在有障礙物(說明只能向右方躲避),則暫存當(dāng)前的行進(jìn)距離值y , 并且控制機(jī)器人向右轉(zhuǎn)動(dòng)90b繼續(xù)前進(jìn),直到機(jī)器人的左方紅外傳感器檢測(cè)不存在障礙物為止(表明已經(jīng)繞過障礙物),假定向右行進(jìn)了d 厘米,則將原來的目標(biāo)點(diǎn)的坐標(biāo)值X 修正為X - d, 然后控制機(jī)器人向左轉(zhuǎn)動(dòng)90b繼續(xù)前進(jìn),同時(shí)在原來的y 值基礎(chǔ)上繼續(xù)記錄行進(jìn)距離值。②如果右方存在有障礙物(說明只能向左方躲避),則暫存當(dāng)前的行進(jìn)距離值y , 并且控制機(jī)器人向左轉(zhuǎn)動(dòng)90b繼續(xù)前進(jìn),直到機(jī)器人的右方紅外傳感器檢測(cè)不存在障礙物為止(表明已經(jīng)繞過障礙物),假定向左行進(jìn)了d 厘米,則將原來的目標(biāo)點(diǎn)的坐標(biāo)值X 修正為X + d, 然后控制機(jī)器人向右轉(zhuǎn)動(dòng)90b繼續(xù)前進(jìn),同時(shí)在原來的y值基礎(chǔ)上繼續(xù)記錄行進(jìn)距離值。③如果左、右方均不存在障礙物(說明向左、右方均能躲避), 系統(tǒng)默認(rèn)控制向右方躲避,其控制方法與①相同。
3 結(jié)論
由于ZigBee 和WiFi 各自存在較為明顯的特點(diǎn),許多特性是相互補(bǔ)充的,因此將二者相結(jié)合具有很好的應(yīng)用前景。本系統(tǒng)結(jié)合ZigBee 和WiFi 各自的優(yōu)點(diǎn),建立了一種樓宇監(jiān)測(cè)無線網(wǎng)絡(luò)系統(tǒng)。它能夠自動(dòng)監(jiān)測(cè)樓宇中人員的活動(dòng)情況,并根據(jù)基于ZigBee 無線傳感器網(wǎng)絡(luò)發(fā)出的告警指令,自動(dòng)控制機(jī)器人到達(dá)告警位置進(jìn)行跟蹤。與傳統(tǒng)的監(jiān)測(cè)系統(tǒng)相比較,該系統(tǒng)具有低成本、無人值守的特點(diǎn)。該系統(tǒng)已經(jīng)在科羅拉多礦業(yè)學(xué)院工程系主樓上得到實(shí)際應(yīng)用。該系統(tǒng)還可以應(yīng)用于礦山、小區(qū)等地方,同時(shí),也適用于環(huán)境監(jiān)測(cè)(需要將紅外距離傳感檢測(cè)器換成溫度、濕度等傳感檢測(cè)器). 但是,該機(jī)器人目前只能每次從固定的地點(diǎn)(坐標(biāo)原點(diǎn))出發(fā),經(jīng)過預(yù)定的路線到達(dá)目標(biāo)點(diǎn),當(dāng)然,如果配備GPS 模塊,就很容易解決該問題。
