
本文分別介紹國內(nèi)部分具有代表性的電動自行車控制器整機(jī)電路,并指出與其他產(chǎn)品的不同之處及其特點(diǎn)。所列電路均是根據(jù)實(shí)物進(jìn)行測繪所得,圖中元件號為筆者所標(biāo)。通過介紹具體實(shí)例,達(dá)到舉一反三的目的。
電動自行車控制器
目前流行的電動自行車、電動摩托車大都使用直流電機(jī),對直流電機(jī)調(diào)速的控制器有很多種類。電動車控制器核心是脈寬調(diào)制(PWM)器,而一款完善的控制器,還應(yīng)具有電瓶欠壓保護(hù)、電機(jī)過流保護(hù)、剎車斷電、電量顯示等功能。
電動車控制器以功率大小可分為大功率、中功率、小功率三類。電動自行車使用小功率的,貨運(yùn)三輪車和電摩托要使用中功率和大功率的。從配合電機(jī)分,可分為有刷、無刷兩大類。關(guān)于無刷控制器,受目前的技術(shù)和成本制約,損壞率較高。筆者認(rèn)為,無刷控制器維修應(yīng)以生產(chǎn)廠商為主。而應(yīng)用較多的有刷控制器,是完全可以用同類控制器進(jìn)行直接代換或維修的。
1.有刷控制器實(shí)例
(1)山東某牌帶電量顯示有刷控制器
電路方框圖見圖1。
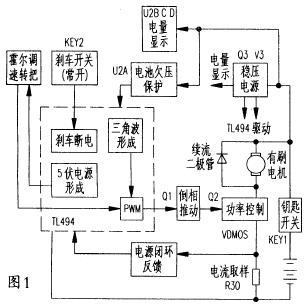
1)電路原理
電路原理圖見圖2所示,該控制器由穩(wěn)壓電源電路、PWM產(chǎn)生電路、電機(jī)驅(qū)動電路、蓄電池放電指示電路、電機(jī)過流及蓄電池過放電保護(hù)電路等組成。
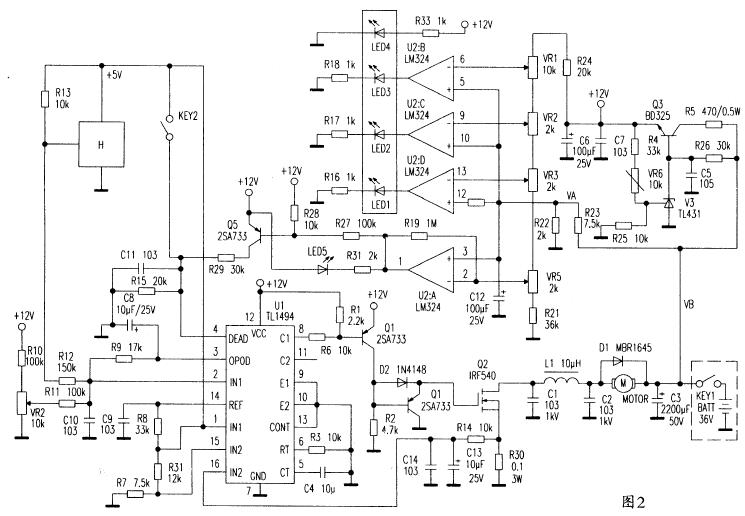
穩(wěn)壓電源 由V3(TL431),Q3等元件組成,從36V蓄電池經(jīng)過串聯(lián)穩(wěn)壓后得到+12V電壓,給控制電路供電,調(diào)節(jié)VR6可校準(zhǔn)+12V電源。
PWM電路 以脈寬調(diào)制 器TL494為核心組成。R3、C4與內(nèi)部電路產(chǎn)生振蕩,頻率大約為12kHz。
H是高變低型霍爾速度控制轉(zhuǎn)把,由松開到旋緊時,其輸出端可得到4V—1V的電壓。該電壓加到TL494的②腳,與①腳電壓進(jìn)行比較,在⑧腳得到調(diào)寬脈沖。②腳電壓越低,⑧腳輸出的調(diào)寬脈沖的低電平部分越寬,電機(jī)轉(zhuǎn)速越高,電位器VR2用于零速調(diào)節(jié),調(diào)節(jié)VR2使轉(zhuǎn)把松開時電機(jī)停轉(zhuǎn)再過一點(diǎn)。
電機(jī)驅(qū)動電路 由Q1、Q2、Q4等元件組成。電機(jī)MOTOR為永磁直流有刷電機(jī)。TL494的⑧腳輸出的調(diào)寬脈沖,經(jīng)Q1反相放大驅(qū)動VDMOS管Q2。TL494的⑧腳輸出的調(diào)寬脈沖低電平部分越寬,則Q2導(dǎo)通時間越長,電機(jī)轉(zhuǎn)速越高。D1是電機(jī)續(xù)流二極管,防止Q2擊穿。TL494的⑧腳輸出低電平時,Q1、D2導(dǎo)通,Q4截止,Q2導(dǎo)通;TL494的⑧腳輸出高電平時,Q1、D2截止,Q4導(dǎo)通,迅速將Q2柵極電荷泄放,加速Q(mào)2的截止過程,對降低Q2溫度有十分重要的作用。
蓄電池放電指示電路 由LM324組成四個比較器,12V由R24、VR1、VR4、VR3、VR5、R21分壓形成四個不同基準(zhǔn)電壓分別加到四個比較器的反相端。蓄電池電壓經(jīng)R23和R22分壓加到每個比較器的同相端,該電壓和蓄電池電壓成比例。VA=VB*R22/(R22+R23)。當(dāng)蓄電池電壓不低于38V時,LED1、LED2、LED3均點(diǎn)亮;當(dāng)電池電壓低于38V時,LED3熄滅;當(dāng)電池電壓低于35V時,LED2熄滅;當(dāng)電池電壓低于33V時,LED1熄滅,此時應(yīng)給電池充電。調(diào)節(jié)VR1、VR4、VR3可分別設(shè)定LED3、LED2、LED1熄滅時的電壓。LED4用作電源指示,LED5用作欠壓切斷控制器輸出指示。
蓄電池過放電保護(hù) 當(dāng)蓄電池放電到31.5V時.LM324的①腳輸出低電平,三極管Q5導(dǎo)通,約5V電壓加到TL494的死區(qū)控制端④腳。該腳電位≥3.5V,就會迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使三極管Q1、Q2截止,電機(jī)停止運(yùn)轉(zhuǎn),蓄電池放電停止,進(jìn)入電池保護(hù)狀態(tài)。此時LED5點(diǎn)亮,指示出該狀態(tài)。VR5用于設(shè)定電池保護(hù)點(diǎn)電壓。
電機(jī)過流保護(hù) R30為電機(jī)電流取樣電阻,當(dāng)過流時,取樣電壓經(jīng)R14加到TL494的⑩腳。當(dāng)⑩腳電位高于⑩腳電位時,TL494內(nèi)部運(yùn)放2輸出高電平,迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使Q1、Q2截止,電機(jī)停止運(yùn)轉(zhuǎn),從而保護(hù)了電機(jī)。
制動保護(hù) 當(dāng)剎車制動時,KEY2接通.5V電壓加到TL494的死區(qū)控制端④腳,迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使Q1、Q2截止,電機(jī)停止運(yùn)轉(zhuǎn),實(shí)施制動保護(hù)。
2)調(diào)試
調(diào)速電路零速調(diào)試:速度轉(zhuǎn)把完全松開。調(diào)節(jié)VR2使電機(jī)停轉(zhuǎn)并再調(diào)過一點(diǎn)以保證可靠置零速。制動調(diào)試:轉(zhuǎn)動速度轉(zhuǎn)把,電機(jī)旋轉(zhuǎn)。此時閉合制動開關(guān)KEY2,Q2柵極應(yīng)立即變?yōu)榈碗娖?V。過流保護(hù)調(diào)試:轉(zhuǎn)動速度轉(zhuǎn)把,Q2柵極為高電平12V。此時在源極對地之間加上0.8V左右的電壓,柵極應(yīng)很快變?yōu)榈碗娖健?/p>
蓄電池放電指示電路用可調(diào)電源代替蓄電池。電壓為38V時,調(diào)節(jié)VR1,使LED3剛好熄滅;電壓為35V時,調(diào)節(jié)VR2,使LED2剛好熄滅;電壓為33V時,調(diào)節(jié)VR3,使LED1剛好熄滅;電壓為31V時,調(diào)節(jié)VR5,使LED5剛好點(diǎn)亮,此時TL494的④腳應(yīng)為高電平5V左右,進(jìn)入電池欠壓保護(hù)狀態(tài)。通過上述設(shè)置,僅LED1點(diǎn)亮?xí)r,電壓為33V-34V,應(yīng)及時給蓄電池充電,不過LED1熄滅至LED5點(diǎn)亮這段時間,蓄電池還可維持運(yùn)行,但LED5點(diǎn)亮?xí)r,進(jìn)入欠壓保護(hù)狀態(tài)。此時應(yīng)注意,過一會兒電池電壓因電機(jī)停轉(zhuǎn)而回升,保護(hù)解除,又恢復(fù)工作。如此反復(fù)保護(hù)-工作-保護(hù)的結(jié)果會損壞電池和控制器,故應(yīng)避免出現(xiàn)這種狀況。
(2)上海偉顯牌控制器
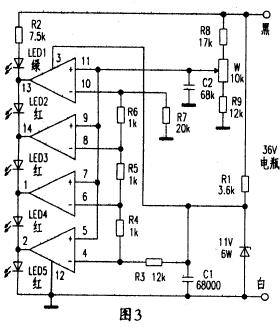
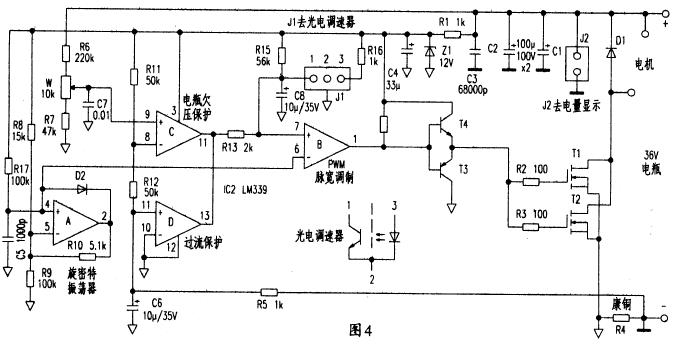
使用LM324、LM393和LM339制作的有刷控制器可靠性是很高的,就是器件數(shù)量多些。該控制器僅用一片LM339制作有刷控制器部分。用另一塊LM339制成電量顯示部分。顯示部分見圖3,電路原理見圖4所示。
上海偉星對該控制器的調(diào)速采用了光電速度轉(zhuǎn)把。由于北方干燥,沙土灰塵大,影響了光電速度轉(zhuǎn)把的使用。實(shí)踐證明,完全可以用霍爾速度轉(zhuǎn)把替代它。具體方法見圖5。
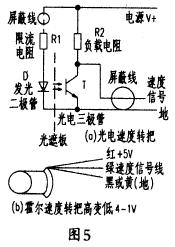
光電速度轉(zhuǎn)把改為霍爾速度轉(zhuǎn)把關(guān)鍵有兩點(diǎn):一是加裝+5V穩(wěn)壓電源;二是根據(jù)原速度信號輸出點(diǎn)信號變化規(guī)律,選用相應(yīng)信號變化的霍爾調(diào)速轉(zhuǎn)把。
該有刷控制器以PWM電路為核心,前面有三角波發(fā)生器、電瓶欠壓檢測、電機(jī)過電流檢測;后面有驅(qū)動、功率開關(guān)等。每部分都是獨(dú)立的。檢查調(diào)試都比較方便。三角波發(fā)生器由IC2A、R17、C5、D2、R9、R10等組成施密特振蕩器,在C5上產(chǎn)生三角波。脈寬調(diào)制器是IC2B,它的輸入之一⑥腳,為來自C5上的三角波,輸入之二⑦腳,是來自速度轉(zhuǎn)把(J1)①腳的速度信號。從IC2B①腳輸出調(diào)寬脈沖,送互補(bǔ)推挽放大器。互補(bǔ)推挽驅(qū)動由T3、T4組成,脈沖高電平到來,上管NPN管T4導(dǎo)通,12V加到功率管T1、T2的柵極,T1、T2導(dǎo)通;脈沖低電平到來,上管NPN管T4截止。下管PNP管T2導(dǎo)通,將T1、T2柵極的電荷迅速放掉,T1、T2截止。電池欠壓保護(hù)由IC2C組成電壓比較器,當(dāng)電瓶電壓低于31.5V時,它的⒁腳變?yōu)榈碗娢唬喈?dāng)于R13輸入一端接地,將轉(zhuǎn)把速度信號降到接近零伏。使IC2B①腳呈低電平,T4截止、T3導(dǎo)通;T1、T2截止。過電流保護(hù)由IC2D組成電壓比較器,當(dāng)過電流時。R4右端電位變低。通過R5加到IC2D⑾腳,比較器翻轉(zhuǎn)⒀腳變?yōu)榈碗娢唬瑯酉喈?dāng)于R13輸入一端接地。將轉(zhuǎn)把速度信號降到接近零伏,使T1、T2截止。
(3)四川綿陽產(chǎn)某牌中功率有刷控制器
該控制器采用無刷專用芯片,MC33035為核心制作的有刷控制器。
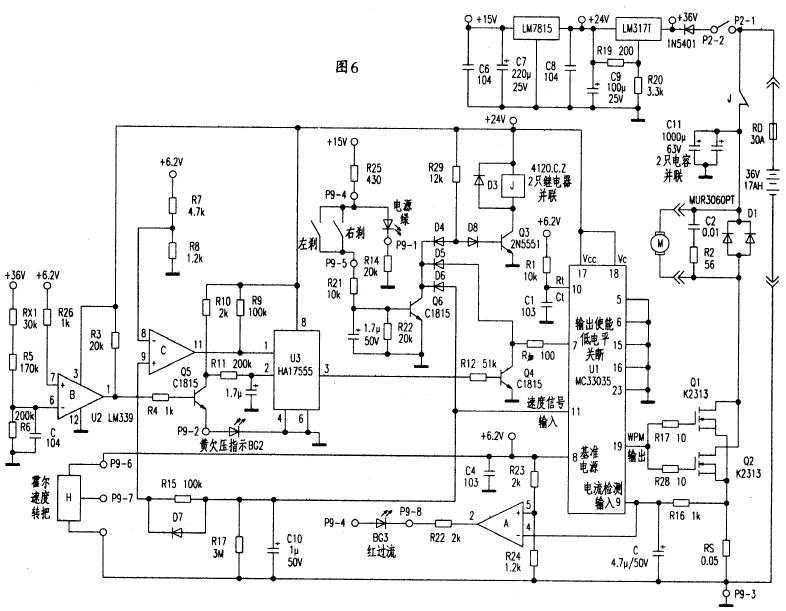
控制器電路原理圖見圖6所示,該控制器的特點(diǎn)是剎車時三管齊下,具體工作原理如下:
剎車電路主要由J、Q3、Q6等組成。繼電器常開觸點(diǎn)串聯(lián)在電機(jī)的供電電路中,+24V通過R29、D8為Q3提供基極電流,Q3導(dǎo)通,J得電吸合,常開觸點(diǎn)閉合,電機(jī)得電。
1)當(dāng)剎車時,左、右剎車開關(guān)閉合,+15V通過R25、R21為Q6提供基極電流,Q6導(dǎo)通,集電極電位降低,D4導(dǎo)通,使D8截止,Q3失去基極電流而截止,J失電,常開觸點(diǎn)斷開,電機(jī)失電停止轉(zhuǎn)動。
2)在Q6導(dǎo)通,集電極電位降低時,D5也導(dǎo)通,降低了U1的⑦腳電位。該腳低電平關(guān)斷PWM輸出。
3)在Q6導(dǎo)通,集電極電位降低時,D6也導(dǎo)通,無論調(diào)速轉(zhuǎn)把在低速或高速位置,均將霍爾調(diào)速轉(zhuǎn)把轉(zhuǎn)速信號對地短路而降低送往U1⑾腳的信號電壓。
欠壓保護(hù)電路由欠壓檢測U2B和單端觸發(fā)器U3組成。其輸出經(jīng)Q4倒相送U1的⑦腳,關(guān)斷U1的輸出。轉(zhuǎn)把電壓檢測U2C的輸出送單端觸發(fā)器U3強(qiáng)制復(fù)位端④腳進(jìn)行調(diào)速工作。
(4)北京某牌帶防飛車功能有刷控制器
電路原理圖見圖7。
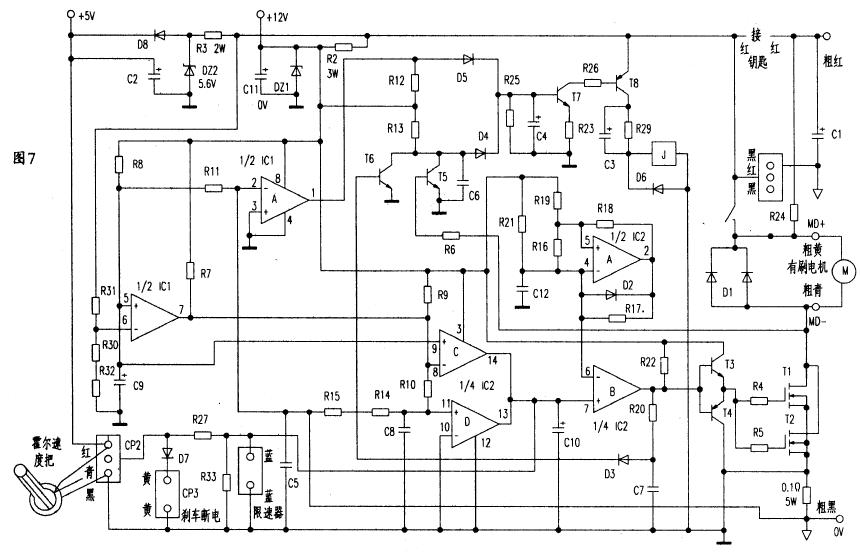
防飛車功能是靠串聯(lián)在電機(jī)和電源正極之間繼電器J的常閉觸點(diǎn)J實(shí)現(xiàn)的。下面兩種情況之一,都會使繼電器得電,斷開電機(jī)電源:一是電機(jī)過流;二是速度轉(zhuǎn)把在零速位置時,VDMOS的漏極D為低電位(開關(guān)管擊穿)。電機(jī)過流,電流取樣電阻R1下端電壓變低,電流檢測IC1A的②腳變低,①腳變成高電位,經(jīng)D5使T7、T8導(dǎo)通,J得電,常閉觸點(diǎn)斷開。
當(dāng)速度轉(zhuǎn)把在零速位置時,PWM IC2的①腳低電位,D3截止,T6截止,其集電極高電位。一種情況:如果功率開關(guān)管沒擊穿則VDMOS的漏極D為高電位,經(jīng)R6使T6導(dǎo)通,其集電極低電位,二極管D4是正與門,由于T5、T6集電極只有一個高電位,二極管D4截止,T7、T8截止,J不得電,其常閉觸點(diǎn)閉合。使電機(jī)受控于T1、T2;另一種情況:如果功率開關(guān)管已擊穿,則VDMOS的漏極D為低電位,經(jīng)R6使T5截止,其集電極高電位,二極管D4是正與門,由于T5、T6集電極都是高電位,二極管D4導(dǎo)通;T7、T8導(dǎo)通,J得電,其常閉觸點(diǎn)斷開,使電機(jī)失電而達(dá)到防飛車保護(hù)。
當(dāng)速度轉(zhuǎn)把不在零速位置時,PWM IC2的①腳是一串正脈沖,經(jīng)積分電路R20、C7積分,C7電位升高,D3導(dǎo)通,T6導(dǎo)通。其集電極低電位,二極管D4是正與門,無論T5集電極電位是高還是低,二極管D4都截止,T7、T8截止。J不得電,其常閉觸點(diǎn)使電機(jī)得電。保證了功率開關(guān)管VDMOS正常導(dǎo)通時的漏極D為低電位,電機(jī)只要不過流即可控制電機(jī)旋轉(zhuǎn)。
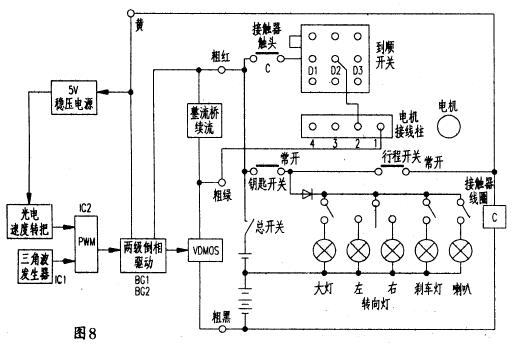
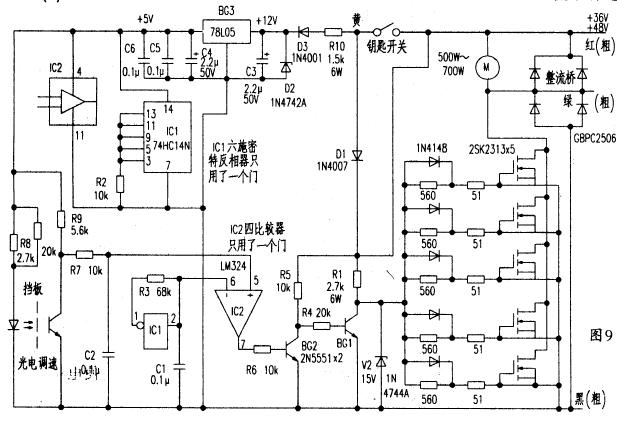
(5)三友SAYO ZHD2大功率有刷控制器
這款控制器是石家莊地區(qū)貨運(yùn)三輪主流控制器之一。電路原理方框圖及接線圖見圖8所示。該電路的特點(diǎn)是:
(1)頻率低,約150Hz,因而續(xù)流二極管采用了普通整流橋;
(2)沒有欠壓和過流保護(hù);
(3)采用了簡單的門電路作三角波發(fā)生器;
(4)采用5只大功率VDMOS并聯(lián),并且采用了簡單均衡電路;
(5)速度轉(zhuǎn)把是自制的光電速度把。
該控制器有36V、48V、60V多種規(guī)格,主要區(qū)別在功率管部分,電路見圖9。如此簡明的控制器,主要損壞元件就是功率管。損壞的原因主要是串激電機(jī)碳刷接觸不良,高壓擊穿功率管;還有堵轉(zhuǎn)造成的過流和過熱。
(6)有刷控制小結(jié)
無論更換原配套、還是換用其他品牌的有刷控制器,首先要搞清控制器的幾條基本連線:電源正、負(fù)線,兩條電機(jī)接線,三條速度轉(zhuǎn)把接線,剎車把接線,鑰匙接線。儀表接線等。進(jìn)一步判斷霍爾速度轉(zhuǎn)把三條接線,具體到哪一條是+5V、地和速度信號,剎車把接線是斷開有效還是短路有效等。
修理有刷控制器,首先要根據(jù)現(xiàn)象粗略估計(jì)損壞部位,排除控制器外部接觸不良等低級故障。例如:飛車現(xiàn)象可能是VDMOS擊穿,也可能是霍爾速度轉(zhuǎn)把的接地端懸空;加電不轉(zhuǎn)可能是控制器故障,也可能是外部連線燒斷或接觸不良,特別是剎車開關(guān)、鑰匙、電池等部位;加載無力可能是電流取樣電阻脫焊,也可能是電機(jī)問題等。確實(shí)認(rèn)定是控制器內(nèi)部故障,再打開檢查維修。
要認(rèn)清控制器內(nèi)部關(guān)鍵器件,有些器件外形一樣,例如TO-220封裝的VDMOS、三端穩(wěn)壓器78xx、續(xù)流二極管等。生產(chǎn)廠商為保密往往把元器件的印刷標(biāo)示打磨掉了,給維修增加了麻煩。小功率控制器,可根據(jù)連線部位等特征來認(rèn)定,例如:續(xù)流二極管兩端和電機(jī)兩條線是并聯(lián)關(guān)系,用萬用表測一下就清楚了;VDMOS和三端穩(wěn)壓器78xx雖然都有一端接地,但VDMOS一端接電機(jī),穩(wěn)壓器78xx則不接電機(jī)。集成塊也可以從腳數(shù)和連線部位等特征來區(qū)分,例如:TL494是16腳的。LM324和LM339是14腳的,LM393和LM358是8腳的;雖然LM324和LM339都是14腳的,但是供電腳不同,LM324供電端是④腳,而接地端是⑾腳。LM339供電端是③腳。接地端是⑿。
接有直徑1mm長度大約1cm的鎳銅絲或康銅絲的電阻,一般是電流取樣電阻,一端接VDMOS的源極S,一端接電池負(fù)極(粗黑),康銅絲兩端受熱很易造成焊錫脫落。可能造成輕載正常、重載無力等故障。
根據(jù)原理圖可以進(jìn)一步沿信號通路分析,有刷控制器核心部位就是PWM。它前面的輸入信號,一路是三角波發(fā)生器的三角波,一路是霍爾速度轉(zhuǎn)把的速度信號。PWM的驅(qū)動信號加到VDMOS柵極。
維修重點(diǎn):一是VDMOS。控制器中就是VDMOS損壞率高,多數(shù)為DS間擊穿。造成加電就高速旋轉(zhuǎn)。在不加電情況下,用萬用表一測便知,一般換用好管故障就會排除。更換時,要注意絕緣和散熱,要墊上導(dǎo)熱絕緣片并涂上導(dǎo)熱硅脂,固定好散熱板的緊固件。伴隨VDMOS擊穿,還可能有其他周邊元件損壞。如互補(bǔ)推挽下管PNP管等。另一個是穩(wěn)壓電源,可以帶電檢查其輸出是否為額定穩(wěn)壓值,如沒有,排除輸出短路后,再沿電路向前檢查。對于控制芯片采用TL494的電路,盡管內(nèi)部復(fù)雜,只要檢查關(guān)鍵點(diǎn),就能判斷大致情況。TLA94第⒁腳為+5V參考電源輸出端,如⑿腳供電正確,⒁腳沒有+5V。一般就是芯片壞了;③腳也是關(guān)鍵點(diǎn),它為高電位時,芯片關(guān)閉輸出,如果它為高電位,要檢查造成原因,例如欠壓保護(hù),霍爾調(diào)速把故障等;④腳在有刷控制器中也是關(guān)鍵點(diǎn),它為高電位(3.6V)時,芯片關(guān)閉輸出,如果它為高電位,要檢查造成原因。也可以檢查后部的關(guān)鍵點(diǎn),例如VDMOS柵極電壓是否隨霍爾速度轉(zhuǎn)把轉(zhuǎn)動變化等。
功率開關(guān)管損壞的原因和對策:
1)熱損壞開關(guān)管過熱后性能下降,極易損壞。開關(guān)管發(fā)熱主要是導(dǎo)通損耗和開關(guān)損耗。導(dǎo)通壓降和電流的乘積越大發(fā)熱越多。壓降大原因之一是器件本身問題,靠嚴(yán)格篩選解決,并聯(lián)使用要經(jīng)過配對;壓降大原因之二不是器件本身問題,是開關(guān)通過放大區(qū)時間過長,通過改善(柵極驅(qū)動和泄放)電路設(shè)計(jì)解決。欠壓保護(hù)和過流保護(hù)工作在臨界(如堵轉(zhuǎn)引起逐周過流保護(hù)動作)時,切換頻繁,PWM頻率升高,開關(guān)管開關(guān)損耗隨頻率升高而升高造成過熱。關(guān)于欠壓保護(hù)工作在臨界切換頻繁的改進(jìn),采用改進(jìn)施密特電路,正反饋加一個二極管和一個電阻。
2)電壓擊穿主要是開關(guān)管本身耐壓不夠,當(dāng)電壓過高的一瞬間,還沒來得及將熱傳到散熱器,管子DS就擊穿了,所以也稱冷擊穿。器件本身應(yīng)經(jīng)過嚴(yán)格篩選,并聯(lián)應(yīng)用器件要經(jīng)過配對,否則易損壞;外因主要是電機(jī)大電流工作時,突然關(guān)斷,引起瞬間高反電勢,例如有刷電機(jī)碳刷接觸不良。解決方案是并聯(lián)大電流、高速、低壓降續(xù)流二極管。例如采用30A雙快恢復(fù)(或肖特基)管。還有,在開關(guān)管DS間加阻容吸收保護(hù)。
3)提高大功率控制器可靠性對策 大功率控制器要采用大電流高反壓耐高溫開關(guān)管。但是,大功率場效應(yīng)管耐壓和導(dǎo)通電阻制造時是有矛盾的,例如耐壓60V左右的管子,導(dǎo)通電阻可以做到8mΩ,耐壓升高到100V,導(dǎo)通電阻就成幾倍增加。行之有效的措施是:一是降低振蕩頻率;二是增加并聯(lián)器件數(shù);三是增加驅(qū)動功率;四是加大散熱板面積;五是振蕩、三角波形成、PWM等電路不用WPM專用芯片TL494等,而選用故障率較低的比較器(LM339)、簡單門電路等器件制作;六是功率冗余,就是功率管和續(xù)流管多只并聯(lián),但要特別注意分布參數(shù);七是欠壓保護(hù)改為欠壓提示,不關(guān)斷等。
2.無刷控制器
有刷電機(jī)是靠換向器(也叫整流子)來保證轉(zhuǎn)子(旋轉(zhuǎn)部分)和固定部分的磁場保持連續(xù)朝一個方向的吸引力或排斥力。這套換向機(jī)構(gòu)最重要的機(jī)件就是電刷,控制器無須改變電流方向,其控制器叫有刷控制器。換向器有觸點(diǎn),是有磨損的。而無刷直流電機(jī)本身沒有換向器,靠控制器改變電機(jī)線圈內(nèi)部電流方向,同樣保證轉(zhuǎn)子和固定部分的磁場,保持連續(xù)朝一個方向的吸引力或排斥力。控制器采用晶體管無觸點(diǎn)開關(guān),永不磨損,這就是無刷控制器。無刷控制器一般靠霍爾傳感器確定轉(zhuǎn)子磁場位置,在恰當(dāng)時機(jī)給相應(yīng)線圈改換電流方向。位置傳感器除霍爾傳感器,還有光電傳感器等。采用霍爾傳感器的無刷電機(jī)和無刷控制器之間一般有8條導(dǎo)線連接;三根粗線是線圈引線,5條細(xì)線中,一條+5V,一條公共地,三條轉(zhuǎn)子位置信號線。
當(dāng)前市場上,無刷控制器有兩大類:一類以單片機(jī)為核心,一類以專用芯片MC33035(MC33033)、A3932SEQ、LB11690、MC33039等為核心。
(1)采用無刷專用芯片MC33035(MC33033)的控制器
MC33035是高性能單片無刷直流電機(jī)控制器,該控制器內(nèi)含可用于正確整流時序的轉(zhuǎn)子位置譯碼器,以及可對傳感器溫度進(jìn)行補(bǔ)償?shù)膮⒖茧娖剑瑫r它還具有一個頻率可編程的鋸齒波振蕩器、一個誤差信號放大器、一個脈沖調(diào)制比較器、三個集電極開路驅(qū)動輸出和三個非常適用于驅(qū)動功率場效應(yīng)管(MOSFET)的大電流圖騰柱式底部輸出器。此外,MC33035還有欠壓鎖定功能,同時帶有可選時間延遲鎖存關(guān)斷模式的逐周限流特性以及內(nèi)部熱關(guān)斷等特性。其典型的電機(jī)控制功能包括開環(huán)速度、正向或反向、以及運(yùn)行使能等。MC33035有多種封裝,下面介紹24腳雙向直列(DIP)封裝的管腳排列及功能定義。
①、②、(24)腳為BT、AT、CT三個集電極開路驅(qū)動輸出,用于驅(qū)動外部功率開關(guān)管。③腳為Fwd/Rev正向/反向輸入,用于改變電機(jī)轉(zhuǎn)向。(④、⑤、⑥腳為SA、SB、SC三個傳感器輸入,用于控制整流序列。輸入邏輯0定義為小于85mV,邏輯1為高于115mV。MC33035內(nèi)部的轉(zhuǎn)子位置譯碼器主要用于監(jiān)控三個傳感器輸入,以便系統(tǒng)能夠正確提供高端和低端驅(qū)動輸入的正確時序。傳感器輸入可直接與集電極開路型霍爾效應(yīng)開關(guān)或光電耦合器相連。此外,該電路還內(nèi)含上拉電阻,其輸入門限典型值為2.2V的TTL兼容電平。⑦腳為Output Enable輸出使能,高電平有效。該腳為高電平時,可使電機(jī)轉(zhuǎn)動。⑧腳為Reference Output參考電壓輸出,為振蕩器定時電容CT提供充電電流,并為誤差放大器提供參考電壓,也可以向傳感器提供電源。⑨腳為Current Sense Noninverting Input電流檢測同相輸入。在一個給定的振蕩器周期中,一個相對于管腳⒂為100mV的信號可中止輸出開關(guān)導(dǎo)通。通常此腳連接到電流檢測的上端。⑩腳為Oscillator振蕩器引腳,振蕩頻率由定時元件RT和CT所選擇的參數(shù)值決定。⑾腳為Error Amp Nominverting Input誤差信號放大器同相輸入端。通常連接到霍爾速度控制器上。⑿腳為Error Amp Noninverting Input誤差信號放大器反相輸入端。在開環(huán)應(yīng)用情況下,此輸入通常連接到誤差放大器輸出端。⒀腳為Error Amp Out/PWM Input誤差放大器輸出/PWM輸入。在閉環(huán)應(yīng)用情況下,此腳用作補(bǔ)償。⒁腳為Fault Output故障輸出端。當(dāng)下列的任一或多個條件滿足時,集電極開路輸出端被觸發(fā)而變?yōu)榈停粺o效的傳感器輸入碼,電流檢測超過100mV,低電壓鎖定或熱關(guān)斷。⒂腳為Current Sense Inverting Input電流檢測反相輸入端。用于給內(nèi)部100mV門限電壓提供參考地,該管腳通常連接到電流檢測電阻的底端。⒃腳為Gnd,該腳用于為控制電路提供一個分離的接地點(diǎn),并可作為參考返回到電源地。⒄腳為Vcc正電源。Vcc在10V~30V的范圍內(nèi),控制器均可正常工作。⒅腳為Vcc底部驅(qū)動輸出的高端電壓是由該腳提供的。工作范圍從10V~30V。⒆珍、⒇、(21)腳為CB、BB、AB這三個圖騰柱式底部驅(qū)動輸出,被設(shè)計(jì)用于直接驅(qū)動外部底部功率開關(guān)管。(22)腳為60°/120°Select,此管腳的電氣狀態(tài)可決定控制電路是工作在60°(高電平狀態(tài))還是120°(低電平狀態(tài))的傳感器電氣相位輸入狀態(tài)下。(23)腳為Brake輸出使能,該管腳為低時允許馬達(dá)運(yùn)行,為高時馬達(dá)運(yùn)行停止。
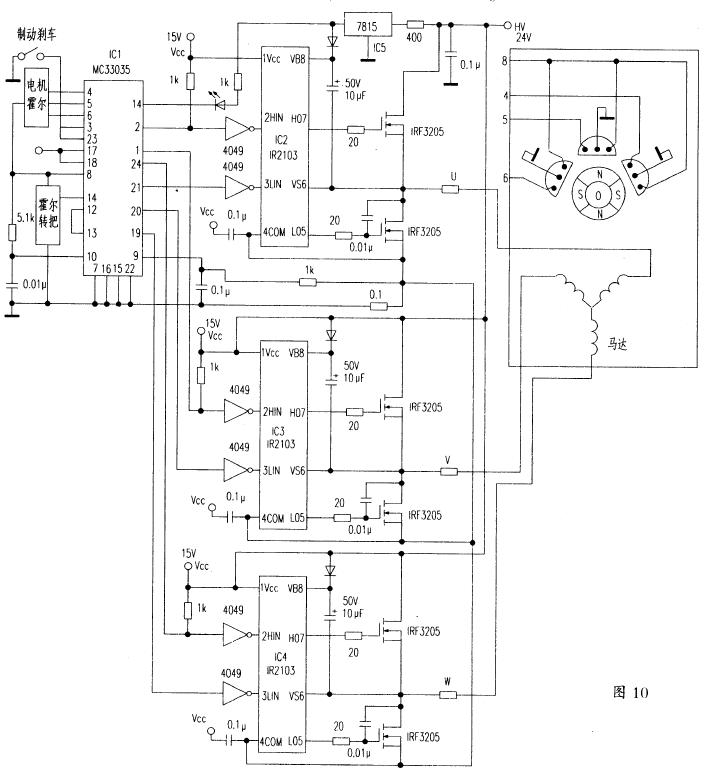
讀者可以查到芯片廠家給出的無刷控制器典型應(yīng)用圖。圖中在無刷電機(jī)和MC33035之間,僅有個驅(qū)動電路的方框,沒有具體電路,一般認(rèn)為是典型三相橋式輸出電路,上管為雙極型三極管,下管為VDMOS場效應(yīng)管。也有人認(rèn)為上管為P溝道場效應(yīng)管,下管為N溝道場效應(yīng)管。由于大功率P溝道場效應(yīng)管價(jià)格昂貴,限制了應(yīng)用。國內(nèi)在三相橋式輸出電路中,上管、下管全部采用VDMOS場效應(yīng)管,驅(qū)動有的采用IR2103(驅(qū)動一相),有的用IR2130(驅(qū)動三相,但價(jià)格昂貴)。有的采用分立元件,由此派生出了幾種版本。
關(guān)鍵問題是,在上管導(dǎo)通時,漏極和源極電位近似等于電源正極電位,要保持上管導(dǎo)通,必須使上管柵極電位高于電源正極電位12V左右。IR2103和IR2130 比較簡單,通過外接一只隔離二極管和一只自舉電容就解決了。當(dāng)下管導(dǎo)通上管截止時,隔離二極管導(dǎo)通,自舉電容充電,兩端電壓接近電源電壓;當(dāng)下管截止上管導(dǎo)通時,隔離二極管截止,自舉電容儲存的電荷給上管柵極供電,電位大大高于電源正極電位,使上管保持導(dǎo)通。
圖10是一個24V電動自行車用無刷控制器電路。圖中三只接在VCC和VB之間的二極管為隔離二極管,接在VB和VS之間的電容為自舉電容。
(2)采用單片機(jī)的無刷控制器
圖11是以89C2051為核心的控制器電路圖。由于89C2051屬低端產(chǎn)品,內(nèi)部沒有PWM和A/D轉(zhuǎn)換,它借助了三個模擬比較器完成相應(yīng)工作。IC8B作為電池欠壓檢測器,欠壓時,給單片機(jī)(13)腳一個低電平;IC8D做過流檢測器,過流時,給單片機(jī)⑦腳一個低電平;借助普通I/O口(11)腳輸出,通過積分電路和轉(zhuǎn)把模擬速度信號在IC8A進(jìn)行比較后。輸入單片機(jī)(12)腳,用軟件完成PWM控制,然后分三相六路輸出到三個專用驅(qū)動芯片IR2103。由IR2103驅(qū)動每相的上、下VDMOS管。

單片機(jī)通過內(nèi)部軟件完成任務(wù),不同產(chǎn)品的軟件差異很大,寫入程序時一般都進(jìn)行了加密。市場上銷售的單片機(jī)是空白的,內(nèi)部程序需用專用設(shè)備進(jìn)行燒寫。因此,采用單片機(jī)的各種控制器,普通售后服務(wù)作維修只是更換外圍元件,單片機(jī)本身損壞,更換工作要依靠原生產(chǎn)廠商進(jìn)行,或供應(yīng)寫有程序的單片機(jī)。單片機(jī)就是單片微型計(jì)算機(jī),它的加入可以很容易地增加一些所謂智能功能,例如巡航功能。巡航功能就是通過按一下巡航功能按鈕,電動自行車就以剛才的速度繼續(xù)前進(jìn),松開霍爾速度轉(zhuǎn)把也不受影響。
3.其他控制器
(1)未涉及到的無刷控制器
也有不需要位置傳感器的無刷控制器,它是通過檢測線圈電動勢判斷轉(zhuǎn)子位置的。顯然,電機(jī)未轉(zhuǎn)動時,它是不能判斷轉(zhuǎn)子位置的,可以等電機(jī)轉(zhuǎn)起來再加電,也可以按一定序列加電,試探出轉(zhuǎn)子位置后,然后正確加電。
(2)未涉及到的開關(guān)磁阻電機(jī)的控制器
開關(guān)磁阻電機(jī)是又一種電機(jī),過去在紡織行業(yè)有應(yīng)用,現(xiàn)在有人研究將它用到電動自行車上,它的控制器類似無刷控制器。