
中心議題:
- 紅外線" title="紅外線">紅外線測距基本原理及其系統(tǒng)的建立
- 紅外線測距在汽車防撞系統(tǒng)" title="汽車防撞系統(tǒng)">汽車防撞系統(tǒng)的應用
- 汽車紅外防撞系統(tǒng)性能評價
1 引言
隨著經濟的發(fā)展,交通運輸業(yè)日益繁榮,但由于道路狀態(tài)、交通管理等硬件難以跟上,加上駕駛超車、出車開小差、錯誤估計車距等主觀的原理,使相互碰撞的交通事故頻頻發(fā)生。解決這個問題的根本措施在于給行進中的汽車安裝能自動跟蹤測距,在危險距離內自動剎車的裝置。
由于電子技術的發(fā)展,先后出現了激光測距、微波雷達測距、超聲波測距及紅外線測距。其中激光測距是靠激光束照射在前車上的反射鏡(汽車尾部)反射回來的激光束探測兩車距離。由于受惡劣的天氣、汽車激烈的振動,反射鏡表面磨損,污染等因素影響,使反射的激光束在一定功率上探測距離比可能探測的最大距離減少1/2~1/3,損失很大,影響探測的精確度;微波雷達測距技術為軍事和某些工業(yè)開發(fā)采用的裝備和振蕩器等電路部分價格昂貴,現在幾乎還沒有開拓民用市場;超聲波測距在國內外已有人做過研究,由于采用特殊專用元件使其價格高,難以推廣;紅外線作為一種特殊的光波,具有光波的基本物理傳輸特性—反射、折射、散射等,且由于其技術難度相對不太大,構成的 測距系統(tǒng)" title="測距系統(tǒng)">測距系統(tǒng)成本低廉,性能優(yōu)良,便于民用推廣。
當前測距系統(tǒng)所用的測距基本原理都是建立在測量時間差的基礎上,而測量時間的方法主要有“脈沖方式”和“調頻2連續(xù)波方式”。這兩種測量方式都是以模擬電路來實現,由于器件延時的影響,使測量精度大大下降。本文采用“計數”方式,通過單片機處理,使測量準確度有了很大提高。
因此,本文研究的紅外測距系統(tǒng)成本較低,機體尺寸小,而且利用一種新的測距原理結合單片機技術的處理,使測量精度有了較大提高;同時把這種測距系統(tǒng)應用于汽車防撞系統(tǒng)中,并進行了裝車防撞試驗。試驗結果表面,這種系統(tǒng)能探測的距離大于40m,且分析判斷險情的速度快,準確性較高。
2 紅外線測距基本原理及其系統(tǒng)的建立
2.1 基本原理
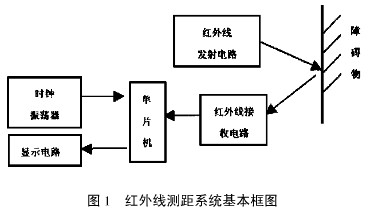
紅外線發(fā)射器不斷發(fā)射出頻率為40kHz的紅外線,經障礙物反射,紅外線接收器接收到反射波信號,并將其轉變?yōu)殡娦盘枴y出發(fā)射波與接收到反射波的時間差t,即可求出距離s:
![]()
式中,c為光速度,一般取3×108m/s。
本文采用“計數”方式,通過單片機處理進行測量,其基本原理是:紅外線發(fā)射器始終處于發(fā)射紅外線的狀態(tài),當紅外接收器第一次接收到障礙物反射回的紅外線時,經電路處理單片機給出一個計數啟動信號,單片機的計數器開始以一定頻率計數;當紅外線接收器第二次接收到反射回的紅外線時,經電路處理單片機給出一個停止計數脈沖,計數器停止計數。通過編程,單片機自動處理,用脈沖的周期T乘以脈沖數n就得到發(fā)射紅外線到接收紅外線的時間差t,即:
![]()
(2)式代入(1)式就得測量距離。
2.2 系統(tǒng)的建立
根據以上的測距原理,設計出系統(tǒng)的基本框圖如圖1。
3 紅外線測距在汽車防撞系統(tǒng)的應用
3.1 基本特點
本文研究的汽車紅外防撞系統(tǒng)吸收了國內外各種測距儀的部分特點,結合我國汽車電子工業(yè)發(fā)展方向和現有電子技術基礎上而設計出來的,具有以下特點:
1)汽車在行進中能自動連續(xù)跟蹤顯示障礙物的距離;
2)在交通量較大的高速公路的車間距離一般為30~50m,本裝置設置極限安全距離為30m,當探測的車間距為30m時,發(fā)出警告聲提醒駕駛員注意剎車;
3)探測的車間距為20m時,給出自動剎車信號;若裝有自動剎車裝置,則自動剎車減速。
3.2 汽車紅外防撞系統(tǒng)
汽車紅外防撞系統(tǒng)的電路原理框圖如圖2所示。
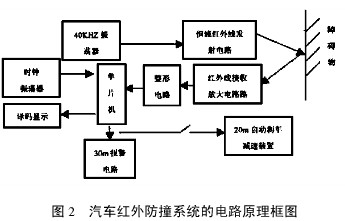
本系統(tǒng)由發(fā)射部分、接收部分、單片機、譯碼顯示電路、報警部分及自動剎車減速裝置六部分組成。
發(fā)射部分:由40kHz振蕩器,恒流發(fā)射發(fā)路和發(fā)射探頭等組成,振蕩器產生占空比非常小的窄脈沖,采用恒流源提供20mA左右的電流,這樣減小了功耗,提高了發(fā)射功率,最后紅外線由發(fā)射探頭聚焦,以散射角小于2°發(fā)射。
接收部分:由紅外線接收頭、第1級放大電路、第2級放大電路、整形、AGC控制增益等電路組成,紅外線接收頭接收信號后經第1級與第2級放大電路放大,由施密特觸發(fā)器電路整形,送入單片機處理。其中AGC控制接收電路的增益,保證恒幅輸出。
單片機:由時鐘振蕩器和單片機組成,經過編程,單片機實現自動計數、計算時間t和測量距離s,并將測量距離連續(xù)輸出給顯示裝置,同時在車間距離為30m時產生報警信號和車間距為20m時,產生自動剎車減速信號。
譯碼顯示電路:由譯碼電路、顯示器組成,單片機輸出的距離信號經譯碼器譯碼,通過顯示器顯示出來。可動態(tài)顯示車與障礙物的距離。
報警部分:由觸發(fā)器、驅動電路和小喇叭組成。當車間距為30m時單片機給觸發(fā)器一個信號,使觸發(fā)器置位產生一組脈沖,通過驅動電路,使小喇叭發(fā)出報警聲,當大于30m時,觸發(fā)器復位,停止產生脈沖。
自動剎車減速裝置:由開關K和自動剎車減速裝置組成,當司機認為必要用到自動剎車減速裝置時,閉合開關K。當車間距小于20m時,單片機提供一個信號,啟動自動剎車減速裝置,防止碰撞。
4 汽車紅外防撞系統(tǒng)性能評價
為了評價汽車紅外防撞系統(tǒng)的性能,包括探測障礙物距和相對速度的性能,采用靜物距離探測和在高速公路上行駛時動態(tài)探測兩種試驗。
4.1 靜物距離探測試驗
將普通汽車放在裝有紅外防撞系統(tǒng)的試驗汽車前面,試驗車從100m遠處以30km/h的速度向普通汽車開來。當距離大于40m時,顯示0;距離小于40m時,顯示器顯示的數據連續(xù)變化;當車間距為30m時,報警器開始報警。實驗結果表明,符合實際車間距離,探測結果準確。實驗結果如圖3所示。

4.2 高速公路上行駛動態(tài)實驗
試驗車與普通車在高速公路上同時向同一個方向行駛,開車前兩車保持100m的距離。試驗車向普通汽車發(fā)射紅外線,探測兩車距和相對速度,其實驗結果如圖4所示。
5 結語
本文采用一種新的測距原理建立了紅外測距系統(tǒng),并研究了紅外測距系統(tǒng)在汽車防撞系統(tǒng)的運用。
為使測量的時間差t準確,采取兩種方法提高精確度:
1)計數脈沖的周期T應取得非常小。達微秒數量級;
2)計數N個接收到的紅外線周期的計數脈沖,利用公式t=nT/N計算時間差t,則精確度提高到大約原來的N倍。
當然,為了使汽車紅外防撞系統(tǒng)實用化還需解決如下幾個問題:
1)怎樣防止旁道上行駛時,因道路兩旁物體,臨車道上的車輛產生錯覺問題;
2)單片機的防振能力差,影響工作可靠性的問題;
3)發(fā)出什么樣的報警信號才能使司機不造成緊張不安的情緒;
4)如何進一步提高單片機計數工作頻率,減少誤差;
5)探測距離受惡劣天氣影響,紅外線損失較大;
6)動態(tài)探測距離有待進一步提高。
這些問題有待進一步研究、探討。相信隨著器件的改進和實驗條件的改善,這些問題會得到圓滿解決。