
一、 概述
無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。電動機的定子繞組多做成三相對稱星形接法,同三相異步電動機十分相似。電動機的轉(zhuǎn)子上粘有已充磁的永磁體,為了檢測電動機轉(zhuǎn)子的極性,在電動機內(nèi)裝有位置傳感器。驅(qū)動器由功率電子器件和集成電路等構(gòu)成,其功能是:接受電動機的啟動、停止、制動信號,以控制電動機的啟動、停止和制動;接受位置傳感器信號和正反轉(zhuǎn)信號,用來控制逆變橋各功率管的通斷,產(chǎn)生連續(xù)轉(zhuǎn)矩;接受速度指令和速度反饋信號,用來控制和調(diào)整轉(zhuǎn)速;提供保護和顯示等等。
永磁無刷直流電機(Permanent Magnet Brushless DC Motor以下簡稱PMBLDC)由于其固有的特點,在家用消費類產(chǎn)品(空調(diào)、冰箱、洗衣機)和IT周邊產(chǎn)品(打印機、軟驅(qū)、硬驅(qū))中得到廣泛的應用。永磁無刷直流電機性能的發(fā)揮,除電機本身的設(shè)計以外,還要靠驅(qū)動技術(shù)和實現(xiàn)這一驅(qū)動技術(shù)的驅(qū)動板來保證。永磁無刷直流電機的驅(qū)動板又是連接上位控制MCU和電力電子變換器的橋梁:它接收上位機的命令,通過一定的控制方法,來達到預定的控制目標;同時把當前電機狀態(tài)及一些基本參數(shù)返回給上位控制的MCU。由上述對PMBLDC驅(qū)動板應達到的功能可知,此類驅(qū)動板的核心器件應是帶多路(6路以上)PWM輸出的嵌入式微控制器。由于目前國內(nèi)對INTEL MCS-51系列單片機的應用有了廣泛基礎(chǔ),我們選用了完全采用8031核,最高時鐘頻率可達40MHz的Infineon C504嵌入式微控制器。
二、 C504的硬件驅(qū)動模式
C504在8031核的基礎(chǔ)上,除了增加A/D轉(zhuǎn)換等外圍接口功能電路外,還增加了非常適合于電機控制的7路全數(shù)字PWM輸出單元CCU(Capture/Compare Unit,捕捉比較單元)。CCU的功能框圖如圖1所示。當C504工作在硬件驅(qū)動模式時,cout3可以調(diào)制cc0,cout0,cc1,cout1,cc2,cout2上面,而且其輸出的時序由INT0,INT1,INT2編碼控制。
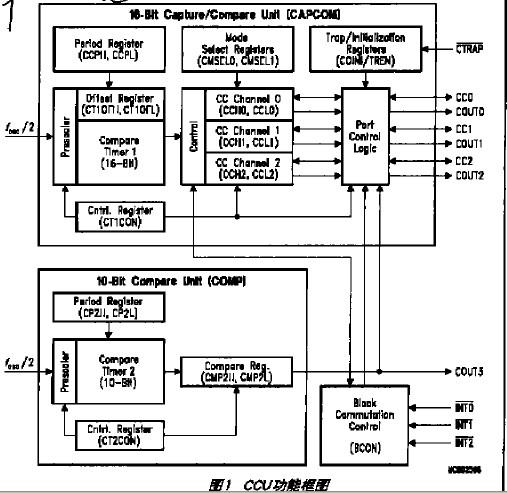
在圖1中,左邊的fosc/2是整個單元工作的時間基準;
CTRAP端可控制cc0-cout2輸出端狀態(tài),處于CTRAP狀態(tài)時cc0~cout2的狀態(tài)可軟件定義;
cc0-cout2端為3相6路16位PWM輸出;
ccx和coutx(x=1,1,2)為互補信號,并且可以通過設(shè)置Offset RegiSTer的數(shù)值來控制其死區(qū)時間;
cout3是單路10 bit PWM輸出端,而INT0~INT2是外部控制,通過INT0~INT2的編碼來控制cc0~cout2的輸出次序。
圖2是C504使用在一臺外轉(zhuǎn)子的永磁無刷直流電機作為電動自行車的驅(qū)動電機時,工作在硬件模式下的電流波形。

這臺樣機現(xiàn)在已由杭州光陽機電技術(shù)有限公司投入生產(chǎn)。當用作電動車驅(qū)動的永磁無刷直流電機采用嵌入式微控制器控制時,可以實現(xiàn)平穩(wěn)啟動等一系列普通模擬控制器所無法實現(xiàn)的功能。
三、 C504的軟件驅(qū)動模式
C504除了提供硬件驅(qū)動模式外,另外還提供了可以任意組合PWM輸出的軟件驅(qū)動動模式,如圖3所示。

所講任意組合有兩層含義:
1)制的電機的相數(shù)可以選擇,并可用不同的ccx和coutx(x=0,1,2)端;
2)控制的方法可以是一般的PWM,也可以是SPWM控制,這一點可以應用到PMBLDC的準正弦電流控制中。
圖4是控制一臺DCDD(DC Direct Drive)洗衣機的電流波形。從圖中可以看出其電流波形已非常接近正弦,取得了良好的控制效果。
