
隨著電子技術(shù)與計算機技術(shù)在汽車電子中的應(yīng)用越來越多,傳統(tǒng)的機械式儀表已經(jīng)逐步被電子儀表所代替。電子儀表有體積小、重量輕等優(yōu)點,可以有效地節(jié)約車內(nèi)有限的空間。其以數(shù)字、文字或圖形方式顯示汽車信息時,顯示直觀、信息量大,可以根據(jù)不同需要修改不同的顯示內(nèi)容。
抬頭顯示器
HUD是英文Head Up Display的縮寫,意為“抬頭顯示”或“平視顯示器”。最初的應(yīng)用就是在戰(zhàn)斗機上,是由電子組件、顯示組件、控制器以及高壓電源等組成的綜合電子顯示設(shè)備,能將飛行參數(shù)、瞄準攻擊、自檢測等信息,以圖像、字符的形式,通過光學(xué)部件投射到座艙正前方組合玻璃上的顯示裝置。由于使司機不必低頭察看儀表盤,HUD可以大大縮短司機的讀表時間。與傳統(tǒng)的儀表板相比,人們使用HUD可以更有效地察覺在行車前方發(fā)生的事件。
1 總體功能
抬頭顯示系統(tǒng)采用LED直接投射式,在前擋風(fēng)玻璃處采用反射膜的反射成像方式。顯示光經(jīng)過位于駕駛座前方的半透明反射板反射后,映入駕駛員的眼睛。駕駛員通過反射板對行車前方的路況和顯示圖像以相重疊的形式進行信息識別。顯示像通過透鏡系統(tǒng)能在無限遠點處成像,所以能夠縮短視線的移動和焦點調(diào)節(jié)所需要的時間。系統(tǒng)具備CAN總線通信功能,可以通過總線接收并指示車速、轉(zhuǎn)速、超速報警、巡航狀態(tài)、擋位等信息。
STM8的車載抬頭顯示器設(shè)計與實現(xiàn)" src="http://files.chinaaet.com/images/20111103/e2318916-4b43-4ba7-9a44-4cc083577a37.jpg" />
圖1 系統(tǒng)設(shè)計框
2 實現(xiàn)方案
①器件選擇
本系統(tǒng)有三個主要器件,CAN收發(fā)器、微處理器和LED顯示驅(qū)動器。主控板需要通過CAN總線接口來獲取車輛的車速、油量、車門開關(guān)等信息,接口電路包括了協(xié)議收發(fā)器以及總線隔離放大器等部分。由于STM8S系列單片機自帶CAN協(xié)議通信接口,所以在這里可以省略以往設(shè)計中采用的SJA1000系列CAN總線收發(fā)器,僅添加CAN物理層接口器件TJA1040就可實現(xiàn)與整車之間的完整通信鏈路。TJA1040作為汽車級芯片,可以在-40~+125℃溫度范圍內(nèi)工作,能承受6kV靜電放電電壓沖擊,且具備差動發(fā)送和接收功能,可以支持最高為1Mb/s的通信速率,單芯片實現(xiàn)了CAN節(jié)點的數(shù)據(jù)收發(fā)、隔離、保護功能。微處理器選擇ST公司的STM8S206xx系列,該處理器片內(nèi)集成CAN控制器,支持CAN 2.0B協(xié)議。于MCU的I/O管腳驅(qū)動能力有限,而直接驅(qū)動LED段碼需要較大的電流。所以需要在MCU和LED段碼屏之間增加LED驅(qū)動電路ST2225A,以增強LED屏的驅(qū)動電流。ST2225A是采用CMOS工藝的LED驅(qū)動控制專用電路,具備連續(xù)背光控制和串行數(shù)據(jù)輸入功能。
②系統(tǒng)設(shè)計
系統(tǒng)采用車載12V電源,帶有ACC鑰匙控制和外部開關(guān)控制。當外部開關(guān)處在關(guān)閉狀態(tài)下時,無論汽車是否啟動,HUD系統(tǒng)都不會進入工作狀態(tài)(處于關(guān)閉狀態(tài))。當外部開關(guān)處在打開狀態(tài)下時分為兩種情況。在汽車熄火拔鑰匙狀態(tài)下,系統(tǒng)進入休眠狀態(tài),僅耗費極微小的電量;當汽車點火啟動后,系統(tǒng)進入工作狀態(tài),從CAN總線讀取數(shù)據(jù)并顯示在LED顯示屏上。
CAN網(wǎng)絡(luò)兩端通常需要連接兩個終端電阻,其作用是防止數(shù)據(jù)在到達線路終端后像回聲一樣返回而干擾原始數(shù)據(jù)。為了防止外界電磁干擾或向外輻射騷擾,兩條數(shù)據(jù)線通常平行纏繞在一起,電位相反,電壓和總等于常值。

圖2 串行協(xié)議時序
顯示驅(qū)動芯片ST2225A的串口數(shù)據(jù)輸入的協(xié)議如圖3所示,輸入數(shù)據(jù)是以一個“1”開始的35位數(shù)據(jù)。當?shù)?6個數(shù)據(jù)傳送完畢后,將與時鐘使能(DATA ENABLE)同步生成載入信號,進而將35位數(shù)據(jù)被載入鎖存器中。時鐘禁止可以生成復(fù)位信號,用于清除移位寄存器中的數(shù)據(jù)并等待下一組35位數(shù)據(jù)。串口通信的時鐘頻率最高可以設(shè)置為500Kbps。
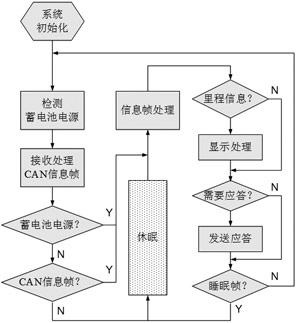
圖3 基本軟件
為了達到連續(xù)背光控制,LED的亮度是通過一個可變電阻來設(shè)置參考電流。圖4給出了ST2225A的接口電路圖。由于要顯示的內(nèi)容較多,總共需要驅(qū)動82個LED燈。而ST2225A只有35個輸出端,因此必須利用其中幾個引腳做公共端,采取分時掃描的驅(qū)動方式。但是公共端越多,輸出占空比越小,LED燈的亮度會受到一定影響,所以公共端不能太多。經(jīng)過試驗驗證,3個公共端對LED燈的亮度沒有太大影響,為了使LED燈保持原有亮度,可以適當加大供電電壓。
③軟件流程
在系統(tǒng)啟動后,屏幕顯示提示信息,用戶輸入時間,日期信息確認后顯示屏開始顯示日期信息,此時汽車顯示速度為零。汽車啟動后系統(tǒng)實時顯示經(jīng)過處理的近似車速和已經(jīng)行駛的里程信息。在行駛的過程中,系統(tǒng)通過解析車身總線發(fā)送來的CAN信息幀進行汽車的里程計數(shù),單片機利用定時中斷定期對計數(shù)值進行統(tǒng)計計算,從而得到速度等信息,程序不斷將速度值和門限值進行比較,如果超過給出報警提示。
總結(jié)
本文主要討論了車載抬頭顯示的基本實現(xiàn)框架和實現(xiàn)所需的主要元器件,著重討論了CAN總線接口、顯示屏控制器接口和電源接口的設(shè)計與實現(xiàn)。通過實際工程化論文中所提出的設(shè)計方案,證實其具有可實現(xiàn)程度高、成本低、效果好等優(yōu)點。