
摘 要: 根據(jù)裝備故障模糊預(yù)測系統(tǒng)的特點,應(yīng)用模糊綜合評判理論,研究了一種面向故障預(yù)測問題的推理運算模型及推理控制策略。
關(guān)鍵詞: 模糊預(yù)測系統(tǒng) 推理機 模糊評判
故障模糊預(yù)測系統(tǒng)不同于傳統(tǒng)意義上的專家系統(tǒng),它是一種以ADMAS仿真平臺開發(fā)出的裝備虛擬樣機為基礎(chǔ),充分利用已有的維修領(lǐng)域的知識和專家經(jīng)驗建立動態(tài)的運算規(guī)則,經(jīng)過模糊推理機的科學運算,評判出故障部位,然后將其仿真結(jié)果參照故障域值定量判斷,預(yù)測故障發(fā)生的時機、狀況的智能性程序系統(tǒng)。模糊推理機是整個模糊預(yù)測系統(tǒng)的核心。在模糊理論中常用的模糊推理方法是在模糊規(guī)則集的基礎(chǔ)上,使用最大—最小合成法與各種蘊涵公式的組合,由于這種方法在模糊運算的過程中忽略了很多次要因素,使之對于裝備故障預(yù)測系統(tǒng)的適應(yīng)性很不理想。基于這一思想,本文建立了一種基于模糊評判的故障預(yù)測推理機制,以保證推理結(jié)果的準確性。
1 基于模糊綜合評判的推理機制
1.1 模糊推理運算模型
模糊推理運算模型是模糊推理機進行推理所使用的工具,運算模型的建立對系統(tǒng)預(yù)測的準確性有著直接的影響。
定義1 設(shè)U={u1,u2,……,un}是所有可能發(fā)生的影響因素的集合,V={v1,v2,……,vm}是所有可能出現(xiàn)的故障點的集合,滿足U=∪ui,且i≠j時,ui∩uj=。視考察對象,每大類因素又可分為若干個子類,即Ui={ui1,ui2,……,uip}。
其中n為大類影響因素,m為評判等級的個數(shù),p為各個大類影響因素中子類影響因素個數(shù)。
定義2 A=(a1,a2,...,an)是U上的一個模糊子集,ai表示因素ui呈現(xiàn)的程度,即ui的權(quán)重大小,且![]() 。同理對ui有Ai=(ai1,ai2,...,aip),且
。同理對ui有Ai=(ai1,ai2,...,aip),且![]() 。
。
在U、V之間進行模糊推理,等價于建立一個從U到V的映射:
f:U→F(V) (![]() ui∈U)
ui∈U)

其中rij為模糊推理的隸屬函數(shù),也可以理解為第i個影響因素導(dǎo)致第j個故障點出現(xiàn)的可信度。
那么由f導(dǎo)出U、V之間的模糊關(guān)系,即構(gòu)成一個模糊規(guī)則集,可表示為一張模糊預(yù)測響應(yīng)表,如表1所示。考慮預(yù)測系統(tǒng)的實時性,模糊關(guān)系矩陣應(yīng)為動態(tài)矩陣,即影響因素和故障點的隸屬關(guān)系應(yīng)隨著使用情況的改變而變化。子類因素的模糊規(guī)則集依此類推。

模糊預(yù)測響應(yīng)表對應(yīng)了一個模糊關(guān)系矩陣R:

于是(U,V,R)構(gòu)成一個綜合評判空間。
將A與R進行廣義模糊合成運算,最后得到模糊推理運算的基本模型:
B=A o R
記B=(b1,b2,…,bm), 它是V上的一個模糊子集,bj(j=1,2,...,m)表示vj發(fā)生的可信度。一般習慣于把(b1,b2,…,bm)歸一化,然后按模式識別的最大隸屬度法進行判別,即可評判出最佳故障部件。
1.2 合成算法的選擇
如果各種影響因素的權(quán)重系數(shù)A、模糊關(guān)系矩陣R及合成算子都已確定,則裝備故障模糊預(yù)測系統(tǒng)的推理模型也就基本確定。根據(jù)采用不同的算子,可分為“主因素突出型”、“主因素決定型”及“加權(quán)平均型”等合成運算,各模型有各自的特點和適用范圍。對于裝備的故障預(yù)測,應(yīng)綜合考慮各方面因素的影響。因此,合成運算宜選用“加權(quán)平均型”算子M(·,⊕)。
1.3 模糊推理算法的實現(xiàn)
根據(jù)模糊運算規(guī)則:
If ui and V then Ai and Ri
其含義為如果有某單因素ui對應(yīng)V的故障點集,則必有一個權(quán)重系數(shù)集A和表征它們隸屬關(guān)系的模糊關(guān)系矩陣Ri與之相對應(yīng)。根據(jù)輸入的預(yù)測對象,可直接由數(shù)據(jù)庫調(diào)用。
對單因素ui來說,一級推理結(jié)果可通過下式計算(右上角符號代表一級)

以下一層所有因素的推理結(jié)果為行向量,組建上一層的模糊關(guān)系矩陣(模糊規(guī)則),即可進行二級綜合評判,依次可以推廣到多層次的推理運算。在故障預(yù)測系統(tǒng)的運行中,首先對含因素較少的“類”作綜合評判,然后再對評判結(jié)果進行“類”之間的高層次的綜合評判,即進行所謂的多層次的綜合評判。
1.4 模糊推理機的設(shè)計
在進行故障預(yù)測時,需要考慮眾多因素的影響,其中絕大部分是模糊變量,很難尋求到它們與故障之間的精確數(shù)學關(guān)系式。有些因素如部件的磨損量等可以進行定量分析,而有些因素如環(huán)境條件的改變等只能進行定性分析,這就需要把定性分析與定量分析在系統(tǒng)內(nèi)部有機地結(jié)合起來。由于故障預(yù)測系統(tǒng)推理時沒有明確的目標,為了提高推理的效率,本文采用正向的推理策略,即由影響因素正向找出一條最可能出現(xiàn)故障點的途徑。其推理流程如圖1所示。
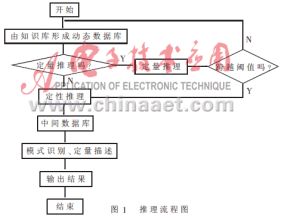
首先根據(jù)用戶輸入的信息,掃描知識庫,調(diào)用可用規(guī)則集及定量推理所用的數(shù)學模型形成動態(tài)數(shù)據(jù)庫,按照動態(tài)數(shù)據(jù)庫中所調(diào)用的相關(guān)公式進行定量運算。當定量運算的結(jié)果超過閾值集中某些閾值時,系統(tǒng)將產(chǎn)生質(zhì)變,然后將質(zhì)變現(xiàn)象轉(zhuǎn)化為定性描述,并依此作為觸發(fā)條件,轉(zhuǎn)入定性推理,將定性推理的結(jié)果存入中間數(shù)據(jù)庫,按模式識別最大隸屬度原則選擇故障部件,結(jié)合仿真結(jié)果與故障域值進行定量判斷,輸出最后結(jié)果。定量推理結(jié)果小于閾值時,重新掃描知識庫,形成新的動態(tài)數(shù)據(jù)庫。系統(tǒng)運行的結(jié)果證明,正向推理具備比較直觀的優(yōu)點,用戶可以主動向系統(tǒng)提供有用的事實信息,適合故障預(yù)測問題的求解。
2 實例分析
在裝備故障預(yù)測問題的求解過程中,因裝備系統(tǒng)以子結(jié)構(gòu)為基礎(chǔ),首先把預(yù)測任務(wù)分配到各個子結(jié)構(gòu),根據(jù)其推理結(jié)果,再綜合整體結(jié)構(gòu)形式、技術(shù)檔案,得出裝備總的預(yù)測結(jié)果。表2是以本方法預(yù)測某裝備駐退機漏液的結(jié)果表[3]。
系統(tǒng)決策模塊根據(jù)模式識別的最大隸屬度原則,選取緊塞器為故障點,將其仿真結(jié)果與故障域值比較,最后輸出故障點為緊塞器,約二百發(fā)后出現(xiàn)故障。
參考文獻
1 王光遠.工程軟設(shè)計理論.北京:科學出版社,1992
2 陳志強.質(zhì)量診斷的模糊專家系統(tǒng).計算機仿真,1997;14(3)
3 黃景德.反后坐裝置漏液漏氣故障分析模糊評價.潤滑與密封,2000(5)