
關(guān)鍵字:MSP430F148 土基智能測斜儀
測斜儀是一種測定鉆孔傾角、方位角和土體側(cè)移及沉降的儀器,在實際工程施工當(dāng)中有著重要作用。施工中對位移的監(jiān)測是研究環(huán)境影響的主要手段。目前大多數(shù)測斜儀采用傳統(tǒng)單片機(jī)作為控制CPU。由于傳統(tǒng)單片機(jī)運行速度慢,內(nèi)部資源少,并且由于測斜儀數(shù)據(jù)采集系統(tǒng)是一種便攜式設(shè)備,一般是由蓄電池供電,因此對系統(tǒng)功耗有較高的要求。
針對傳統(tǒng)單片機(jī)在測斜領(lǐng)域應(yīng)用的缺點和不足,本文所設(shè)計的測斜儀系統(tǒng)采用16位超低功耗單片機(jī)MSP430Fl48作為控制CPU,具有運行速度快、功耗低、電路簡單等優(yōu)點,非常適合傾角測量等各種功耗要求較高的場合,其在低功耗方面的優(yōu)越之處,是傳統(tǒng)單片機(jī)不可比擬的,其內(nèi)部自帶的12位A/D轉(zhuǎn)換器和DMA控制單元分別用于系統(tǒng)采樣電路和數(shù)據(jù)傳輸部分,使得系統(tǒng)的硬件電路更加集成化、小型化。
1 系統(tǒng)硬件總體設(shè)計
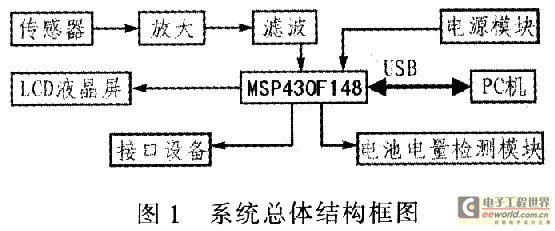
測斜儀本質(zhì)上是一個數(shù)據(jù)采集、處理系統(tǒng)。采用主從式控制結(jié)構(gòu),上位機(jī)為PC機(jī),下位機(jī)為MSP430控制器。系統(tǒng)的主要部分主要由PC機(jī)、傳感器信號采樣處理電路、以TI公司MSP430F148為核心的MSP430控制器、其他外圍電路構(gòu)成。圖1為該系統(tǒng)總體結(jié)構(gòu)框圖。
1.1 電源模塊
系統(tǒng)采用3.3 V供電,考慮到系統(tǒng)低功耗的特點,要求電源具有穩(wěn)壓功能,因此系統(tǒng)電源采用Maxim公司的MAX8902B。MAX8902B能提供0.6~5.3 V的輸出電壓,并且輸出噪聲低,能很好滿足測斜儀系統(tǒng)的要求。MAX8902B的工作電路為TT提供的典型工作電路。
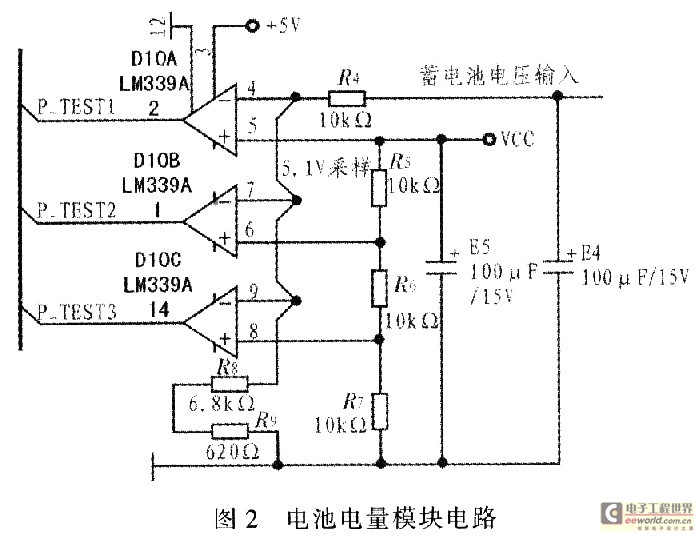
1.2 電池電量檢測模塊
系統(tǒng)內(nèi)部有電池電量檢測模塊,如圖2所示。通過LM339A比較蓄電池電壓和基準(zhǔn)電壓,當(dāng)蓄電池電壓過低時報警提示以防由于電量缺失造成的系統(tǒng)不穩(wěn)定。
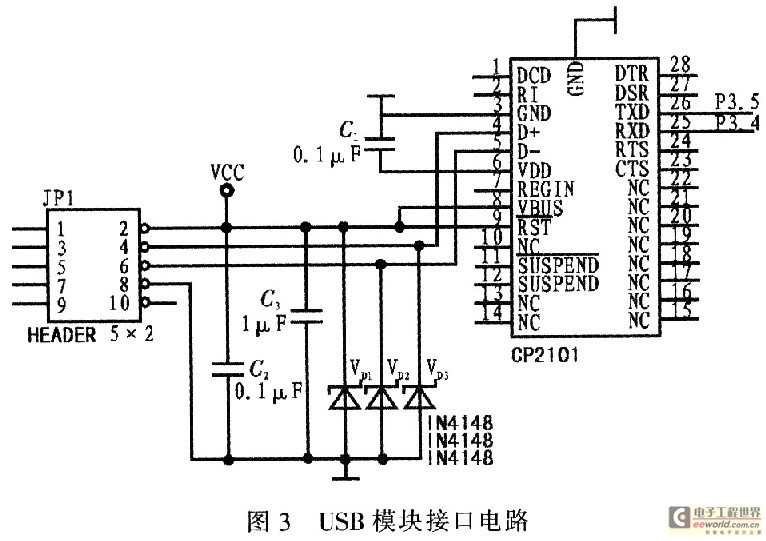
1.3 USB模塊
采用CP2101實現(xiàn)USB-UART轉(zhuǎn)換。CP2101內(nèi)置有與計算機(jī)通信的USB協(xié)議,工作時在計算機(jī)上產(chǎn)生一個虛擬COM端口,用戶就可以按照通用串行口的控制方式使用該COM端口。通過CP210l可以簡單實現(xiàn)UART到USB間的橋接,從而為系統(tǒng)增加USB通信接口,而原來開發(fā)的串口應(yīng)用程序則無需大改動。CP2l01的外圍電路非常簡單,只要接2只去耦電容即可。只需將其引腳TXD和RXD分別連接至MSP430F148的P3.5和P3.4即可實現(xiàn)與單片機(jī)的連接,如圖3所示。
2 系統(tǒng)軟件設(shè)計
軟件設(shè)計由上位機(jī)(地面監(jiān)控和數(shù)據(jù)處理系統(tǒng))和下位機(jī)(井下數(shù)據(jù)采集系統(tǒng))2部分組成。上位機(jī)軟件主要和下位機(jī)通信,方便實現(xiàn)數(shù)據(jù)傳輸、處理、計算和打印等功能。下位機(jī)軟件用于配合數(shù)據(jù)的采集、存儲和傳輸。
2.1 下位機(jī)軟件設(shè)計
下位機(jī)主要完成對被測孔的即時采集和定時采集2種功能。通過定時采集某個時間段內(nèi)某些時刻該孔的數(shù)據(jù),很方便了解被測孔的土體垂直位移趨勢,為判斷建筑物的傾斜程度提供重要的參考依據(jù)。對于某些敏感區(qū)域,為了更好的了解該區(qū)域?qū)崟r的垂直位移狀態(tài),可對其進(jìn)行測斜數(shù)據(jù)的實時采集。
下位機(jī)軟件主要包括傳感器采集、串口通信和主處理等模塊。其中,傳感器采集模塊主要完成對被測孔傾斜數(shù)據(jù)的采集。由單片機(jī)通過自帶的A/D采集模塊對傳感器的信號進(jìn)行采集,可以同時采集8路模擬信號,并通過定時器B控制采集的頻率。也直接將A/D數(shù)據(jù)寄存器的值賦給全局變量,通過全局變量實現(xiàn)與主程序進(jìn)行數(shù)據(jù)的交互。模擬量采集功能主要采用定時器中斷服務(wù)子程序?qū)崿F(xiàn),采樣頻率由定時器控制。在定時器中斷中通過設(shè)置A/D的控制寄存器啟動A/D轉(zhuǎn)換。串口通信模塊完成與上位機(jī)的通信功能,從而將采集到的數(shù)據(jù)傳送到上位機(jī)進(jìn)行處理。當(dāng)接收到上位機(jī)發(fā)送的命令數(shù)據(jù)時,通過中斷標(biāo)志位的置位,進(jìn)入中斷服務(wù)子程序中完成對命令數(shù)據(jù)的接收。當(dāng)進(jìn)行采集數(shù)據(jù)的發(fā)送時,通過不斷地查詢發(fā)送標(biāo)志位的狀態(tài)來判斷本次字節(jié)的發(fā)送是否成功,只有當(dāng)標(biāo)志位改變時,再將下一個字節(jié)的數(shù)據(jù)送入發(fā)送緩沖區(qū),從而最大程度避免發(fā)送時的數(shù)據(jù)堵塞或錯誤。主處理模塊主要完成系統(tǒng)的初始化和各子程序的循環(huán)協(xié)調(diào)工作。系統(tǒng)在初始化后進(jìn)入循環(huán)處理過程,在循環(huán)過程中主處理程序通過模擬量采集模塊獲得被測孔的傾斜數(shù)據(jù),并根據(jù)所接收到的上位機(jī)命令,在設(shè)定的時間段內(nèi)或?qū)崟r的將采集的某幾個孔或某幾個傳感器的數(shù)據(jù)通過串口通信模塊發(fā)送至上位機(jī)。
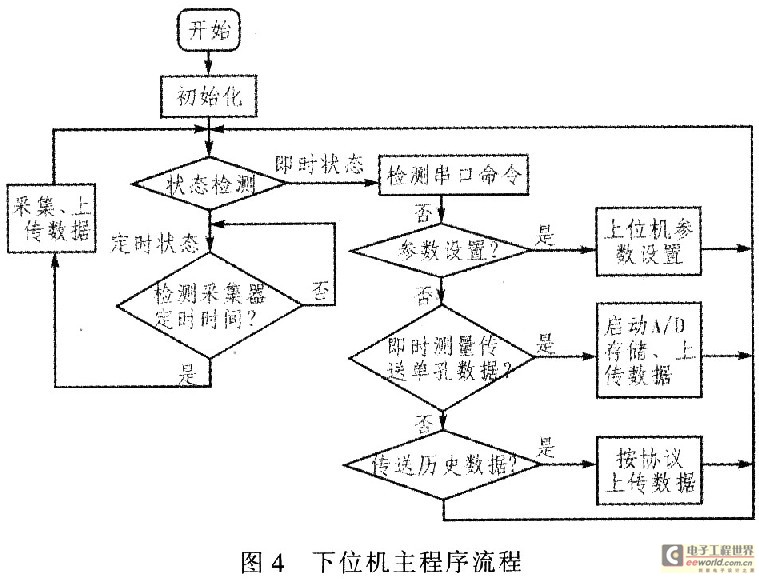
下位機(jī)的主程序流程如圖4所示。下位機(jī)程序上電初始化后就進(jìn)入了狀態(tài)檢測階段,根據(jù)不同參變量的數(shù)值進(jìn)入相應(yīng)的狀態(tài)處理程序。
2.2 上位機(jī)軟件
上位機(jī)軟件的設(shè)計在整個系統(tǒng)的作用至關(guān)重要。為了方便井下設(shè)備與PC機(jī)的通信和數(shù)據(jù)的處理和打印,并且能很好實時監(jiān)控整個系統(tǒng)的運行狀況,上位機(jī)程序是在Delphi平臺上利用MSComm控件完成的。上位機(jī)設(shè)定的參數(shù)主要包括定時或即時采集、孔號、通信端口、累積起點等。當(dāng)系統(tǒng)開始采集,利用MSComm控件通過串口將這些參數(shù)按字符形式依次發(fā)送給單片機(jī)。為了正確接收和還原單片機(jī)采集的數(shù)據(jù),并繪制出土體垂直位移深度曲線。上位機(jī)采用MSComm控件中的OnComm事件捕獲接收到的數(shù)據(jù),并利用Delphi中的TChart控件和TlJneSeries控件將接收的數(shù)據(jù)繪制成深度曲線在PC機(jī)上顯示。
3 試驗結(jié)果分析

圖5為某一時刻經(jīng)單片機(jī)采集傳感器數(shù)據(jù)并傳送到PC機(jī)顯示的土體垂直位移深度曲線。圖5直觀顯示出中本次測量中隨著深度變化,土體垂直位移的變化情況。
4 結(jié)束語
本系統(tǒng)利用MSP430F148單片機(jī)作為控制核心,通過自行設(shè)計的外圍電路,實現(xiàn)了對土基位移的測量和監(jiān)控。上位機(jī)中利用MSComm控件和Delphi的繪圖功能,將土體垂直位移深度的變化情況以曲線的形式實時繪制。該系統(tǒng)具有成本低廉、攜帶方便、耗電量低、使用方便等優(yōu)點。在現(xiàn)代化施工監(jiān)測中具有很好的應(yīng)用潛力。