CAN總線概念
CAN 是Controller Area Network 的縮寫(xiě)(以下稱(chēng)為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車(chē)產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統(tǒng)被開(kāi)發(fā)了出來(lái)。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類(lèi)型及對(duì)可靠性的要求不盡相同,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之增加。為適應(yīng)“減少線束的數(shù)量”、“通過(guò)多個(gè)LAN,進(jìn)行大量數(shù)據(jù)的高速通信”的需要,1986 年德國(guó)電氣商博世公司開(kāi)發(fā)出面向汽車(chē)的CAN 通信協(xié)議。此后,CAN 通過(guò)ISO11898 及ISO11519 進(jìn)行了標(biāo)準(zhǔn)化,現(xiàn)在在歐洲已是汽車(chē)網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。 現(xiàn)在,CAN 的高性能和可靠性已被認(rèn)同,并被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面。現(xiàn)場(chǎng)總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域的計(jì)算機(jī)局域網(wǎng)。它的出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)有力的技術(shù)支持。
該技術(shù)使對(duì)DSP芯片程序的加載可以脫離仿真器而直接受控于列車(chē)的主控機(jī)。該技術(shù)可靠性高,使用靈活方便,具有很強(qiáng)的實(shí)用性。
磁懸浮列車(chē)上有很多基于DSP芯片的模塊和系統(tǒng)。目前, DSP芯片程序的加載與運(yùn)行都主要依賴(lài)于仿真器,而DSP仿真器價(jià)格高、體積大,這使得磁懸浮列車(chē)系統(tǒng)的調(diào)試很不靈活方便;且這些基于DSP芯片的系統(tǒng)一旦脫離仿真器就只能運(yùn)行事前載入的單一的程序,也使系統(tǒng)的靈活性受到了很大的限制。 本文研究了DSP芯片程序加載的基本原理,并根據(jù)這些原理,基于CAN總線,實(shí)現(xiàn)了DSP芯片程序的受控加載,使得DSP芯片程序的加載與啟動(dòng)可直接受控于上位主控機(jī)。由于主控機(jī)的靈活性很大,磁懸浮列車(chē)系統(tǒng)在調(diào)試時(shí)就可根據(jù)需要對(duì)其上各個(gè)控制模塊的主控DSP芯片加載不同的程序,控制它的啟動(dòng)運(yùn)行,非常方便靈活。

2 CAN總線的特點(diǎn)及工作原理
CAN Control Area Network,即控制器局域網(wǎng) 總線是一種有效支持分布式控制或定時(shí)控制的串行通訊網(wǎng)絡(luò)它以半雙工的方式工作一個(gè)節(jié)點(diǎn)發(fā)送信息 多個(gè)節(jié)點(diǎn)接收信息 實(shí)現(xiàn)了全分布式多機(jī)系統(tǒng)提高了數(shù)據(jù)在網(wǎng)絡(luò)中傳輸?shù)目煽啃?其結(jié)構(gòu)形式如圖1所示?CAN總線的信息存取利用了廣播式的存取工作方式 信息可以在任何時(shí)候由任何節(jié)點(diǎn)發(fā)送到空閑的總線上每個(gè)節(jié)點(diǎn)的CAN總線接口必須接收總線上出現(xiàn)的所有信息因此各節(jié)點(diǎn)都設(shè)置有一個(gè)接收寄存器 該寄存器接收信息 然后根據(jù)信息標(biāo)文符決定是否讀取信息包中的數(shù)據(jù)以判斷是否使用這一信息? CAN總線的特點(diǎn)是以通信數(shù)據(jù)塊編碼代替?zhèn)鹘y(tǒng)的地址編碼 CAN總線面向的是數(shù)據(jù)而不是節(jié)點(diǎn)這種方式的優(yōu)點(diǎn)是可使網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制 加入或減少設(shè)備不影響整個(gè)系統(tǒng)的工作?基于CAN總線的各種系統(tǒng)可以根據(jù)用戶(hù)需要任意改變節(jié)點(diǎn)數(shù)量?CAN總線收發(fā)數(shù)據(jù)的長(zhǎng)度最多為8個(gè)字節(jié)因而不存在占線時(shí)間問(wèn)題 可以保證通信的實(shí)時(shí)性通信速率最高可達(dá)1Mb/s距離為40m 最遠(yuǎn)可達(dá)10km速率為5kb/s ?對(duì)通信介質(zhì)的要求較低可以是光纖或同軸電纜甚至雙絞線?

4 DSP芯片的程序加載與運(yùn)行原理
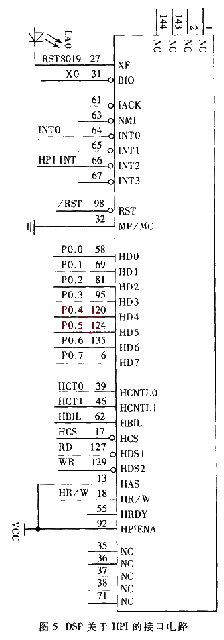
在本項(xiàng)技術(shù)中,DSP的程序加載與啟動(dòng)運(yùn)行是通過(guò)對(duì)其HPI 8位并行口的操作實(shí)現(xiàn)的?下面先簡(jiǎn)單介紹一下DSP的HPI 8位并行口以及如何對(duì)它進(jìn)行讀寫(xiě)操作,然后介紹本文研究的這種DSP程序加載技術(shù)?
4.1 DSP芯片的并口(HPI)簡(jiǎn)介
HPI并行口的讀寫(xiě)操作主要由DSP的三個(gè)16位寄存器控制,它們分別是:HPIC HPI Control Register,控制寄存器 ?HPID HPI Data Register,數(shù)據(jù)寄存器 ?HPIA HPI Adress Register,地址寄存器 ?寫(xiě)HPIC寄存器控制HPI并口的讀寫(xiě)方式以及數(shù)據(jù)高低字節(jié)的讀寫(xiě)順序等;寫(xiě)HPIA寄存器控制寫(xiě)入或讀出數(shù)據(jù)的具體地址(自增模式下2 為數(shù)據(jù)寫(xiě)入/讀出時(shí)的初始地址);從HPID直接寫(xiě)入/讀出數(shù)據(jù)?
HPI有兩種讀寫(xiě)方式:普通模式下的讀寫(xiě)按照HPIA的地址將HPID的數(shù)據(jù)寫(xiě)入內(nèi)存或?qū)⒃摰刂返臄?shù)據(jù)讀入HPID;自增模式下HPIA則是首地址,每次讀或?qū)懖僮骱笏紩?huì)自動(dòng)指向下一個(gè)待讀寫(xiě)的地址?

4.2 DSP芯片的程序加載與啟動(dòng)
由CCS編譯器生成的DSP可執(zhí)行文件是一種.out文件?本方法中首先調(diào)用TI公司提供的hex500.exe程序,將其轉(zhuǎn)換為.hex文件3,這種.hex文件的組織結(jié)構(gòu)具體如下: 它由一個(gè)一個(gè)的塊(block)組成,每一個(gè)塊的第一個(gè)字節(jié)表示當(dāng)前塊包含的待加載的有效數(shù)據(jù)的長(zhǎng)度,第二?第三個(gè)字節(jié)表示這些有效數(shù)據(jù)寫(xiě)入DSP內(nèi)存時(shí)的首地址,從第五個(gè)字節(jié)開(kāi)始是待寫(xiě)入DSP內(nèi)存的有效數(shù)據(jù)(第四個(gè)字節(jié)通常為0x00,是無(wú)效數(shù)據(jù)),超出當(dāng)前有效數(shù)據(jù)長(zhǎng)度的數(shù)據(jù)不需要處理?需要注意的是,文件的結(jié)尾(也就是最后一個(gè)塊)的第一個(gè)字節(jié)的數(shù)據(jù)是0,表示當(dāng)前塊為文件的結(jié)尾,其后的任何數(shù)據(jù)都是無(wú)效數(shù)據(jù)? 知道這種.hex文件的組織結(jié)構(gòu)后,就可以分離出其中的有效數(shù)據(jù),然后就可將這些有效數(shù)據(jù)寫(xiě)入DSP的內(nèi)存?本技術(shù)是通過(guò)DSP的HPI口來(lái)完成寫(xiě)操作的?具體如下: 首先對(duì)DSP復(fù)位,清除原來(lái)的數(shù)據(jù);然后在單片機(jī)的控制下從.hex文件讀出每次寫(xiě)入的初始地址,從這些初始地址開(kāi)始不斷地將有效數(shù)據(jù)寫(xiě)入DSP的內(nèi)存;寫(xiě)操作完成后,向DSP的內(nèi)存地址0x007f寫(xiě)數(shù)據(jù)0x8000,程序即啟動(dòng),開(kāi)始執(zhí)行?

5 系統(tǒng)的組成
系統(tǒng)組成框圖如圖2所示? ISA插卡通過(guò)ISA插槽與PC機(jī)(即相當(dāng)于磁懸浮系統(tǒng)上的主控機(jī))連接,受PC機(jī)的控制,接收來(lái)自PC機(jī)的數(shù)據(jù),向PC機(jī)轉(zhuǎn)發(fā)收到的數(shù)據(jù)?插卡上有SJA1000芯片,通過(guò)它與PCB板上的SJA1000實(shí)現(xiàn)數(shù)據(jù)交換?
CB板上的SJA1000的數(shù)據(jù)/地址信號(hào)線與單片機(jī)的P0并口相連,同時(shí)P0并口也與DSP的HPI并口數(shù)據(jù)線HD0~7相連?在單片機(jī)的控制下,SJA1000接收來(lái)自PC機(jī)的數(shù)據(jù),并將其通過(guò)P0并口發(fā)送給單片機(jī),然后單片機(jī)再將這些數(shù)據(jù)通過(guò)HPI發(fā)送給DSP?