
摘要:針對現(xiàn)代雷達(dá)導(dǎo)航設(shè)備的生產(chǎn)調(diào)試和外場測試的雙重需要,,設(shè)計一種便攜式低功耗智能測控系統(tǒng),。系統(tǒng)以MSP430為主處理器,設(shè)計ARINC429總線通信在內(nèi)的雷達(dá)導(dǎo)航儀測控系統(tǒng),,采用電池供電,,可手持方式工作。該方法降低開發(fā)成本,、提高系統(tǒng)可靠性和便攜性,,且可以嚴(yán)格保證通信的實(shí)時性。實(shí)驗(yàn)結(jié)果表明該測控系統(tǒng)能夠?yàn)閷?dǎo)航儀提供各類導(dǎo)航檢測信號,,可以完成相關(guān)導(dǎo)航設(shè)備的生產(chǎn)測試,、外場調(diào)試、后期維護(hù)等功能,,具有高度集成化,、智能化、接口標(biāo)準(zhǔn)化的優(yōu)點(diǎn),。
關(guān)鍵詞:便攜式設(shè)備,;低功耗,;MSP430;智能測控系統(tǒng)
0 引言
為了解決許多航空設(shè)備采用的航空總線種類各異,,難以互相兼容的問題,,現(xiàn)代飛機(jī)航空電子系統(tǒng)要求各機(jī)載航空設(shè)備使用統(tǒng)一的航空總線,以方便系統(tǒng)集成,。ARINC429總線是航空電子設(shè)備之間數(shù)據(jù)傳輸?shù)暮娇展I(yè)標(biāo)準(zhǔn),,具有接口方便、數(shù)據(jù)傳輸可靠的特點(diǎn),,目前已經(jīng)是航空領(lǐng)域應(yīng)用最廣泛的航空電子總線,。ARINC429是美國航空無線電公司(ARINC)制定的航空數(shù)字總線傳輸標(biāo)準(zhǔn),屬單向數(shù)據(jù)總線,,可由兩根獨(dú)立總線實(shí)現(xiàn)雙向傳輸,,數(shù)據(jù)傳輸率為12.5~100 Kb/s,傳輸字為32位,??偩€上的發(fā)送器只能有一個,而接收器可多達(dá)20個,。國內(nèi)外研究和實(shí)現(xiàn)ARINC429總線通信的文獻(xiàn)很多,,接口豐富且使用廣泛。文獻(xiàn)采用FPGA實(shí)現(xiàn)了ARINCA29的接口轉(zhuǎn)換為通用的USB接口,。文獻(xiàn)采用C8051單片機(jī)為核心,,在測控ARINC429總線數(shù)據(jù)的同時,還能夠監(jiān)測總線上電氣特性的變化,。文獻(xiàn)研究了基于PC/104總線結(jié)構(gòu)的ARINCA29總線測控系統(tǒng),,可以完成多路429總線數(shù)據(jù)的實(shí)時接收和發(fā)送功能。文獻(xiàn)研究了基于FPGA的ARINCA29總線接收發(fā)送系統(tǒng),,實(shí)現(xiàn)四路ARINCA29信號接收和兩路發(fā)送的功能,。雖然采用ARINCA29總線通信的研究很多,但還未見用于雷達(dá)導(dǎo)航儀測控的報道,。隨著國產(chǎn)雷達(dá)導(dǎo)航儀的體積不斷優(yōu)化,,功能日益復(fù)雜,傳統(tǒng)的測控手段由于采用人工組裝,、整機(jī)測試的方法,,已經(jīng)不能滿足新形勢下武器裝備的保障要求。
本文采用低功耗16位單片機(jī)MSP430F449為主處理器,,以集成電路HS3282和HS3182為主要通信芯片,,設(shè)計完成包括ARINC429總線通信在內(nèi)的雷達(dá)導(dǎo)航儀測控系統(tǒng)。此測控系統(tǒng)采用電池方式供電,,可以手持方式工作,,高亮度液晶方式顯示,,提高測控系統(tǒng)可靠性和便攜性,能夠?yàn)閷?dǎo)航儀提供各類導(dǎo)航檢測信號,,可以完成相關(guān)導(dǎo)航設(shè)備的生產(chǎn)測試,、外場調(diào)試,、后期維護(hù)等功能,。
1 ARINC429串行總線
ARINCA29總線是一種單向廣播式數(shù)據(jù)總線,采用雙角屏蔽線傳輸信息,,可由兩根獨(dú)立總線實(shí)現(xiàn)雙向傳輸,,數(shù)據(jù)傳輸率為:高速傳輸?shù)奈凰俾蕿?00 Kb/s±1%,低速傳輸?shù)奈凰俾蕿?12.0~14.5)Kb/s±1%,。ARINC429規(guī)定數(shù)據(jù)傳輸采用雙極性歸零制的三態(tài)碼方式,,如圖1所示,即調(diào)制信號由“高”,、“零”和“低”狀態(tài)組成的三電平狀態(tài),。雙極性歸零碼的基本信號波形中攜帶了位同步信息,位同步是由零狀態(tài)變至“高”或“低”狀態(tài)的這一狀態(tài)變化來識別,。字同步是以傳輸周期間至少有四個位時的時間間隔為基準(zhǔn),,緊跟該字間隔后要發(fā)送的第一位起點(diǎn)即為新字的起點(diǎn)。
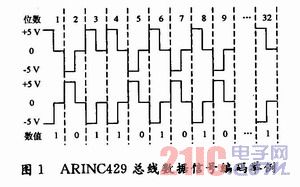
ARINC429總線數(shù)據(jù)的基本信息單元是由32位構(gòu)成的一個數(shù)據(jù)字,,每個數(shù)據(jù)字被分為5個基本區(qū)域,,即標(biāo)志碼(LABEL),源/目的識別碼(SDI),,數(shù)據(jù)區(qū)(DATA),,符號狀態(tài)位(SSM),校驗(yàn)位(PARITY),,ARINC429總線數(shù)據(jù)信號編碼舉例如圖1所示,。
2 硬件及接口電路
接口的實(shí)現(xiàn)方式選用Intersil公司的HS3282芯片,它支持ARINC429通信規(guī)范和其他串行數(shù)據(jù)傳輸協(xié)議,,采用+5 V供電,。具有兩路接收、一路發(fā)送的功能,。通道接收器之間也是獨(dú)立的并行接收,,可以直接連接到ARINC429總線,而不需電平轉(zhuǎn)換,。使用時和HS3182總線驅(qū)動器配合,,就可以發(fā)送數(shù)據(jù)進(jìn)行二級差分驅(qū)動,產(chǎn)生ARINC429總線的電平,。HS3282數(shù)據(jù)總線為16位,,MSP430F449為16位單片機(jī),,從而避免了8位單片機(jī)為解決系統(tǒng)總線匹配的問題需要采用鎖存器作為虛擬總線的煩惱,提高了測控系統(tǒng)的可靠性,。
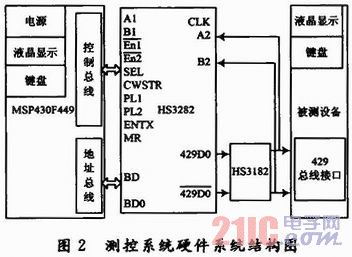
具體設(shè)計思路為:首先利用一片HS3282和兩片HS3182配合使用形成兩路接收和兩路發(fā)送通道,。它們構(gòu)成了數(shù)據(jù)收發(fā)、串并轉(zhuǎn)換的主體,。HS3282主要用來完成接收,、發(fā)送時所必須具備的串并、并串轉(zhuǎn)換功能,;HS3182用來完成對兩路輸出信號的差分驅(qū)動,,然后設(shè)計命令寄存器和狀態(tài)寄存器,用以完成對輸入,、輸出通道的選擇和對HS3282的控制字的設(shè)置,。該控制電路單片機(jī)無需外擴(kuò)展電路,將32個I/O口的P0口和P2口用于數(shù)據(jù)傳輸功能,,實(shí)現(xiàn)對HS3282的16位數(shù)據(jù)傳輸功能,。把P1口及P3口的P3.3,P3.4作為控制信號與控制端引腳相連,,來控制HS3282數(shù)據(jù)收發(fā)操作,。測試數(shù)據(jù)由預(yù)先設(shè)置或手工輸入兩種方式完成。返回數(shù)據(jù)顯示到高亮度液晶顯示器上,。圖2為測控系統(tǒng)硬件系統(tǒng)結(jié)構(gòu)圖,。
3 總體軟件設(shè)計
雷達(dá)導(dǎo)航儀智能測控系統(tǒng)以單片機(jī)為核心,控制測控系統(tǒng)的數(shù)據(jù)發(fā)送,、轉(zhuǎn)換,、接收、顯示等功能,。本系統(tǒng)中采用的MSP430F449單片機(jī)是TI公司的一款超低功耗的混合信號控制器,,它具有16位RISC結(jié)構(gòu),150ns指令周期和簡潔的27條內(nèi)核指令,,1.8~3.6 V的低工作電壓,,支持
JTAG在線調(diào)試。它還集成了豐富的外圍模塊,,豐富的系統(tǒng)資源完全可以滿足雷達(dá)導(dǎo)航儀的測控要求,。
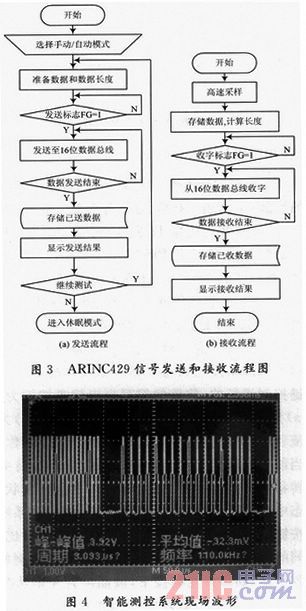
系統(tǒng)工作可分為三種主狀態(tài):準(zhǔn)備接收狀態(tài),正在接收狀態(tài)和準(zhǔn)備發(fā)送狀態(tài),。整個系統(tǒng)軟件的運(yùn)行圍繞著按鍵控制進(jìn)行的,,軟件的編寫也以鍵盤按鍵為基礎(chǔ)。圖3(a)為ARINCA29信號發(fā)送流程圖,,圖3(b)為信號接收流程圖,,橢圓框里寫著系統(tǒng)當(dāng)前的狀態(tài)名稱,,直線表示當(dāng)前系統(tǒng)所處的狀態(tài),圓形框表示按鍵,,箭頭表示狀態(tài)轉(zhuǎn)移走向,。每一條直線都表示一種循環(huán)的狀態(tài),在該狀態(tài)中,,系統(tǒng)一直等待的按鍵按下,,如果有,系統(tǒng)立即掃描按鍵,,得出鍵值,,并與直線下方的按鍵進(jìn)行比較,,如有相同的按鍵,,馬上執(zhí)行該按鍵對應(yīng)的程序。例如在準(zhǔn)備接收狀態(tài),,如果背光鍵按下,,液晶屏背光則從亮變?yōu)闇缁驈臏缱優(yōu)榱痢nl率鍵按下后,,ARINC429總線頻率將在12.5 Kb/s,,50 Kb/s和100 Kb/s之間相互轉(zhuǎn)換。存儲鍵按下后,,系統(tǒng)將跳到讀寫存儲器子狀態(tài),;確認(rèn)鍵按下,系統(tǒng)將跳到正在發(fā)送主狀態(tài),。使用類似的方法,,為了簡化使用人員的操作步驟,可以在使用時選擇手動或自動模式,。自動模式提供兩組默認(rèn)的典型數(shù)據(jù)進(jìn)行發(fā)送,,以測試?yán)走_(dá)導(dǎo)航儀的通信完好性。當(dāng)需要進(jìn)行完備性測試時,,可以采用手動模式,,這時可以進(jìn)行任何信號及數(shù)值的通信。
4 實(shí)驗(yàn)與分析
對此便攜式低功耗雷達(dá)導(dǎo)航儀智能測控系統(tǒng)的測試內(nèi)容包括:發(fā)送數(shù)據(jù),、接收數(shù)據(jù)和發(fā)送數(shù)據(jù)間隔等測試,。由于HS3282的兩路輸出是差分輸出的,所以只需要測試其中的一路就可以了,。智能測控系統(tǒng)現(xiàn)場波形如圖4所示,,發(fā)送的數(shù)據(jù)采用自動模式,控制字為奇校驗(yàn),。通過示波器直接觀察HS3282芯片的輸出信號,,輸出電平是3.92 V,,滿足TTL的電平要求。而數(shù)據(jù)之間的時間間隔,,即組間數(shù)據(jù)4位間隔,。由單片機(jī)的延時程序即可完成。
5 結(jié)語
目前,,該測試系統(tǒng)已設(shè)計完成,,并交付航空某研究所的生產(chǎn)維修部門進(jìn)行雷達(dá)導(dǎo)航儀的生產(chǎn)調(diào)試和外場測試使用。實(shí)踐證明:系統(tǒng)采用手持方式工作的設(shè)計方案正確,,能夠?yàn)閷?dǎo)航儀提供各類導(dǎo)航檢測信號,,提高系統(tǒng)可靠性和便攜性,并且可以嚴(yán)格保證通信的實(shí)時性,。能夠很好地完成相關(guān)導(dǎo)航設(shè)備的生產(chǎn)測試,、外場調(diào)試、后期維護(hù)等功能,,具有高度集成化,、智能化、接口標(biāo)準(zhǔn)化的優(yōu)點(diǎn),。同時創(chuàng)造了可觀的經(jīng)濟(jì)效益,,使雷達(dá)導(dǎo)航設(shè)備的地面維修工作躍升到一個新水平。