
隨著人們生活水平的提高,汽車(chē)已逐漸進(jìn)入了普通家庭,隨著汽車(chē)數(shù)量的逐年增加,汽車(chē)被盜、被搶也成為一個(gè)較為嚴(yán)重的社會(huì)問(wèn)題。在解決汽車(chē)防盜問(wèn)題上,大部分汽車(chē)的報(bào)警方式主要采用燈光閃爍和喇叭鳴響,這種防盜方式存在有三種缺陷,一是報(bào)警器容易被破壞,而失去防盜功能;二是喇叭鳴響聲會(huì)造成周邊居民生活被嚴(yán)重干擾;三是汽車(chē)被盜后,外觀稍加改動(dòng),就很難追蹤。為了解決這些問(wèn)題,本系統(tǒng)利用GPS定位系統(tǒng)實(shí)時(shí)跟蹤汽車(chē)位置,在被盜情況下可利用GSM短信模塊隨時(shí)向車(chē)主或公安部門(mén)發(fā)送汽車(chē)的GPS定位信息,加快破案速度。
1 系統(tǒng)工作原理及框圖
當(dāng)車(chē)主離開(kāi)車(chē)輛時(shí),即可啟動(dòng)防盜系統(tǒng),首先車(chē)主需設(shè)置手機(jī)號(hào),以備接收車(chē)輛的定位信息,此時(shí),單片機(jī)控制GPS模塊,不斷獲取GPS定位數(shù)據(jù),并對(duì)獲取的GPS數(shù)據(jù)進(jìn)行分析,從而獲取包括車(chē)輛的經(jīng)、緯度以及速度等信息。系統(tǒng)通過(guò)車(chē)輛的速度或經(jīng)、緯度的變化來(lái)判斷車(chē)輛是否被移動(dòng),如果車(chē)輛被非法移動(dòng),單片機(jī)將控制GSM模塊將車(chē)輛的定位信息通過(guò)短消息,以每間隔十分鐘時(shí)間發(fā)送到車(chē)主指定的手機(jī)中,同時(shí),單片機(jī)將此信息存儲(chǔ)在EEPROM中,以做將來(lái)的證據(jù)使用。車(chē)主第一時(shí)間知道車(chē)輛位置后,即可通過(guò)GSM遠(yuǎn)程網(wǎng)絡(luò)控制防盜系統(tǒng),切斷車(chē)輛的點(diǎn)火電路,使車(chē)輛熄火。同時(shí),車(chē)主將車(chē)輛定位信息提供給警方,盡快找回自己的車(chē)輛。系統(tǒng)工作原理框圖見(jiàn)圖1。

2 硬件系統(tǒng)設(shè)計(jì)
2.1 單片機(jī)控制核心
采用宏晶科技公司的單時(shí)鐘機(jī)器周期的單片機(jī)STC12C5A60S2,它是高速、低功耗、超抗干擾的新一代51系列單片機(jī),指令代碼完全兼容傳統(tǒng)的8051,但速度快8~12倍,具有60kB在系統(tǒng)可編程Flash存儲(chǔ)器,其具有兩個(gè)獨(dú)立的采用UART工作方式的全雙工串行通信接口,可方便地實(shí)現(xiàn)單片機(jī)同時(shí)與GPS和GSM進(jìn)行數(shù)據(jù)通信。
2.2 GPS數(shù)據(jù)采集部分
GPS模塊采用瑞±u-blox公司的NEO-5Q主芯片,該芯片采用u-blox最新的KickStart微弱信號(hào)攫取技術(shù),能確保采用此模組的設(shè)備在任何可接收到信號(hào)的位置及任何天線尺寸都能夠有最佳的初始定位性能并進(jìn)行快速定位,且具有成本低廉,體積小,功能強(qiáng)等優(yōu)點(diǎn)。

單片機(jī)與GPS模塊的連接如圖2所示,采用了串口通訊的方式,模塊在上電后,會(huì)實(shí)時(shí)接收GPS數(shù)據(jù)包,數(shù)據(jù)包的類(lèi)型有:GPCSV:可見(jiàn)衛(wèi)星信息;GPGLL:地理定位信息;GPRMC:推薦最小定位信息;GPVTG:地面速度信息;GPGGA:GPS定位信息;GPGSA:當(dāng)前衛(wèi)星信息等。設(shè)計(jì)中,只對(duì)GPPMC型數(shù)據(jù)包進(jìn)行解析,數(shù)據(jù)包的內(nèi)容為:$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh
<1>UTC時(shí)間,hhmmss(時(shí)分秒)格式
<2>定位狀態(tài),A=有效定位,V=無(wú)效定位
<3>緯度ddmm.mmmm(度分)格式(前面的0也將被傳輸)
<4>緯度半球N(北半球)或S(南半球)
<5>經(jīng)度dddmm.mmmm(度分)格式(前面的0也將被傳輸)
<6>經(jīng)度半球E(東經(jīng))或W(西經(jīng))
<7>地面速率(000.0~999.9節(jié),前面的0也將被傳輸)
<8>地面航向(000.0~359.9度,以正北為參考基準(zhǔn),前面的0也將被傳輸)
<9>UTC日期,ddmmyy(日月年)格式
<10>磁偏角(000.0~180.0度,前面的0也將被傳輸)
<12>模式指示(僅NMEA0183 3.00版本輸出,A=自主定位,D=差分,E=估算,N=數(shù)據(jù)無(wú)效)
2.3 GSM模塊部分
GSM模塊采用德國(guó)西門(mén)子公司的TC35I,可以實(shí)現(xiàn)單片機(jī)控制GSM模塊接收和發(fā)短信等功能。單片機(jī)通過(guò)向GSM模塊發(fā)送AT指令,控制GSM運(yùn)行。發(fā)送短消息用到的AT指令有:
AT:握手命令
AT+CMGF=1:設(shè)置短信方式為文本方式;
AT+CSCS=GSM:設(shè)置為GSM字符集;
AT+CSMP=17.67.0.0:設(shè)置編碼類(lèi)型和字符集;
模塊與單片機(jī)的連接如圖2所示,采用了串口通訊的方式,當(dāng)需要發(fā)送短消息時(shí),就按順序給模塊發(fā)送AT指令和數(shù)據(jù),將信息發(fā)送給車(chē)主。
2.4 人機(jī)接口和存儲(chǔ)部分
人機(jī)接口包括矩陣鍵盤(pán)和液晶顯示部分,主要用于實(shí)現(xiàn)預(yù)置的手機(jī)號(hào)碼的輸入、顯示和防盜功能的開(kāi)啟與關(guān)閉功能。存儲(chǔ)器采用HC總線的EEPROM AT24C08,其為非易失性存儲(chǔ)器,存儲(chǔ)的數(shù)據(jù)可保存100年以上,并可進(jìn)行上萬(wàn)次擦寫(xiě)。單片機(jī)將GPS上接收來(lái)的數(shù)據(jù)進(jìn)行解析后,所獲得的車(chē)輛所處的經(jīng)、緯度,速度等信息保存在該存儲(chǔ)器中,為以后做為公安機(jī)關(guān)的證據(jù)依據(jù)。
3 系統(tǒng)軟件設(shè)計(jì)
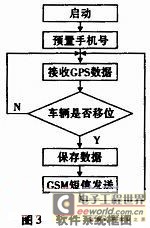
自動(dòng)跟蹤系統(tǒng)軟件由界面程序、信號(hào)處理程序和控制信號(hào)輸出程序等三部分組成。信號(hào)處理程序?qū)崿F(xiàn)了單片機(jī)對(duì)GPS信號(hào)的采集、解析等以及通過(guò)GSM網(wǎng)絡(luò)向用戶發(fā)送車(chē)輛定位信息等,是軟件程序的重點(diǎn);界面程序主要完成手機(jī)號(hào)設(shè)置、鍵盤(pán)處理、液晶顯示等,實(shí)現(xiàn)了與用戶良好的溝通;控制信號(hào)程序?qū)崿F(xiàn)對(duì)GSM信號(hào)的接收與分析,完成對(duì)車(chē)輛的點(diǎn)火開(kāi)關(guān)的控制;其軟件總框圖如圖3所示。
4 結(jié)束語(yǔ)
本系統(tǒng)利用單片機(jī)對(duì)GPS和GSM模塊的控制,實(shí)現(xiàn)了車(chē)輛防盜系統(tǒng)的設(shè)計(jì)。實(shí)驗(yàn)?zāi)M,當(dāng)車(chē)輛被盜時(shí),系統(tǒng)的工作可不受惡劣環(huán)境影響,接收、發(fā)送信息準(zhǔn)確、實(shí)時(shí)。