
0 引言
隨著數(shù)字技術(shù)的不斷發(fā)展,數(shù)字集成電路在各個(gè)領(lǐng)域的應(yīng)用越來越廣泛。本文介紹一種用數(shù)字集成電路、霍爾集成電路設(shè)計(jì)的里程表。該里程表具有電路結(jié)構(gòu)簡單、計(jì)量精度高、工作穩(wěn)定可靠、改變?cè)O(shè)計(jì)量程方便、成本低等特點(diǎn)。我們?cè)鴮⒃摾锍瘫戆惭b于某電動(dòng)車上測試,取得了滿意的效果。
1 工作原理
里程表的工作原理框圖如圖1所示。霍爾集成電路完成從非電量到電量的轉(zhuǎn)換,將車輪轉(zhuǎn)動(dòng)信號(hào)轉(zhuǎn)換為電信號(hào)。此信號(hào)幅值較小,經(jīng)過比較器使其變成幅值較大的脈沖信號(hào)。該脈沖信號(hào)由施密特觸發(fā)器整形后送給計(jì)數(shù)器計(jì)數(shù)。計(jì)數(shù)器輸出的8421BCD碼經(jīng)譯碼器譯碼后驅(qū)動(dòng)LED顯示器顯示出計(jì)量結(jié)果。根據(jù)該框圖設(shè)計(jì)的里程表電路如圖1所示。

2 主要單元電路的設(shè)計(jì)
2.1 霍爾集成電路傳感器
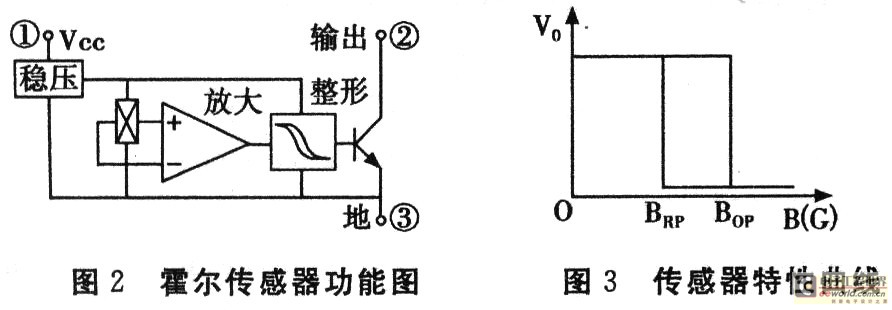
傳感器是里程表的重要部件,它的性能對(duì)整機(jī)電路的工作起著極其重要的作用。這里我們選用CS3120開關(guān)型霍爾集成電路。這種集成電路具有使用壽命長、無觸點(diǎn)磨損、無火花干擾、輸出電阻小、功耗低、靈敏度高、溫度特性好等特點(diǎn)。電路內(nèi)部由霍爾元件、電壓調(diào)整器、差分放大器、輸出級(jí)等組成,采用塑料封裝成三端器件,其功能圖如圖2所示。
穩(wěn)壓部分使電路能在較寬的電源電壓范圍內(nèi)工作,開路輸出使電路很容易地與眾多的邏輯部件連接。圖3是這種開關(guān)型霍爾集成電路的轉(zhuǎn)移特性曲線。由圖3看出,當(dāng)外加磁場強(qiáng)度B 上升到導(dǎo)通點(diǎn)BOP時(shí),霍爾開關(guān)輸出由高電平降為低電平;當(dāng)B由大變小降至BRP時(shí),輸出再由低電平跳變?yōu)楦唠娖健?/p>
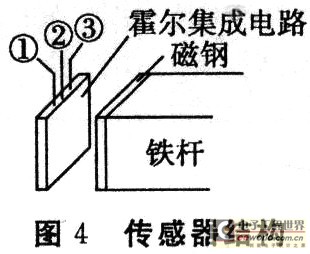
實(shí)際應(yīng)用時(shí)將霍爾傳感器做成如圖4所示的結(jié)構(gòu)。鐵桿與磁鋼粘牢后固定于車輪的適當(dāng)位置。霍爾集成電路固定在車架上,與磁鋼的垂直距離為2 mm~3 mm。這樣,車輪每旋轉(zhuǎn)一周,磁鋼產(chǎn)生的磁場掠過霍爾集成電路一次使其輸出一個(gè)負(fù)脈沖。計(jì)數(shù)器對(duì)該脈沖進(jìn)行計(jì)數(shù),則:里程=車輪周長×脈沖數(shù)。
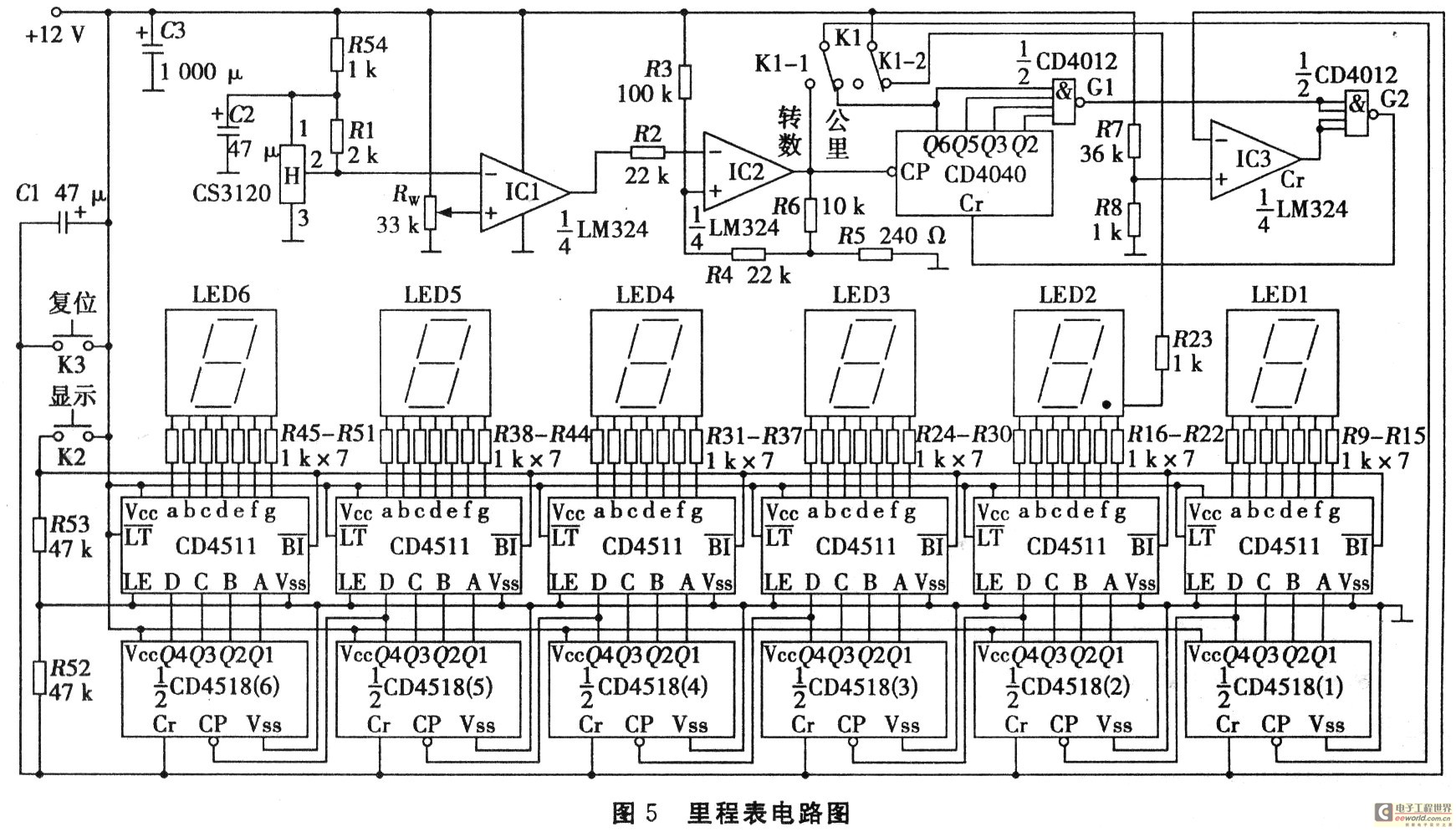
霍爾集成電路的工作電壓以5~6 V為宜,過高的電源電壓會(huì)引起電路因溫升而不穩(wěn)。圖5整機(jī)電路中R54為降壓電阻,將12 V電源電壓降至6 V給霍爾集成電路供電。C2是濾波電容。R1為霍爾集成電路的負(fù)載電阻,沒有這個(gè)電阻,輸出電壓的變化甚小。
應(yīng)注意的是霍爾集成電路有字標(biāo)平面為敏感面,要使磁力線垂直穿過敏感面。另外,如發(fā)現(xiàn)不能觸發(fā),應(yīng)調(diào)換磁鋼極性使電路工作正常。
霍爾集成電路CS3120輸出的脈沖幅度較小,不能直接推動(dòng)計(jì)數(shù)器工作,故在電路中將該信號(hào)送給由IC1和Rw組成的比較器。每當(dāng)負(fù)脈沖到來時(shí),由于IC1反相端的電位低于同相端的電位,故比較器輸出一個(gè)幅值較大的正脈沖。
2.2 施密特觸發(fā)器
運(yùn)算放大器IC2以及R2~R6構(gòu)成反相輸出的施密特觸發(fā)器。它對(duì)比較器輸出的脈沖信號(hào)進(jìn)行整形。IC2工作在開關(guān)狀態(tài),具有十分短的前后沿時(shí)間。閾電平主要由R3和R4決定。R5上的電壓降提供小量的正反饋以便產(chǎn)生所需要的滯后,并防止電路振蕩。
2.3 計(jì)數(shù)器
十二級(jí)二進(jìn)制計(jì)數(shù)器CD4040以及四輸入端二與非門CD4012構(gòu)成任意進(jìn)制計(jì)數(shù)器。因?yàn)檐囕喌闹荛L不是10的整數(shù)倍,所以用十進(jìn)制計(jì)數(shù)器計(jì)數(shù),最后顯示的只能是車輪轉(zhuǎn)動(dòng)的圈數(shù),而不是具體的公里數(shù),設(shè)計(jì)任意進(jìn)制計(jì)數(shù)器就是為了解決這一問題。
筆者實(shí)測某車輪的周長為1.834米,則在100米內(nèi),車輪轉(zhuǎn)動(dòng)54圈。據(jù)此,將任意進(jìn)制計(jì)數(shù)器設(shè)計(jì)成54進(jìn)制。由圖5知,當(dāng)CD4040輸人54個(gè)脈沖后,其Q12~Q1十二個(gè)輸出中,Q6、Q5、Q3,Q2為高電平,該高電平信號(hào)經(jīng)與非門G1后輸出低電平,再經(jīng)與非門G2反相變?yōu)楦唠娖郊又?CD4040的Cr復(fù)位端使其復(fù)位,從而實(shí)現(xiàn)54進(jìn)制計(jì)數(shù)。同時(shí),第54個(gè)脈沖過后,Q6下跳信號(hào)加至十進(jìn)制計(jì)數(shù)器CD4518(1)的CP端(K3處于圖示位置),使其加1。可見,十進(jìn)制計(jì)數(shù)器的最低位每輸入一個(gè)脈沖,表示車前進(jìn)了100米,即0.1公里。其余十進(jìn)制計(jì)數(shù)器記錄的依次為里程的個(gè)位~萬位。
2.4 其它電路
K1是雙刀雙擲開關(guān),用于顯示器工作狀態(tài)選擇。置于“公里”一邊,LED2的小數(shù)點(diǎn)因K1-2閉合得電而顯示,顯示器顯示的是公里數(shù);置于“轉(zhuǎn)數(shù)”一邊因K1-2斷路小數(shù)點(diǎn)失電不再顯示,且由于十進(jìn)制計(jì)數(shù)器直接接收脈沖信號(hào),顯示器顯示車輪旋轉(zhuǎn)圈數(shù)。
譯碼電路CD4511能直接推動(dòng)LED數(shù)碼管工作。它的BI滅燈控制端,低電平有效。該控制端通過開關(guān)K2接至+12 V電源上。平時(shí)BI為低電平處于滅燈狀態(tài),數(shù)碼管不顯示以節(jié)省電能;當(dāng)按下K2時(shí),數(shù)碼管工作顯示里程或車輪旋轉(zhuǎn)圈數(shù)。當(dāng)然,也可去掉K2,將BI與+ 12 V短接,則數(shù)碼管始終處于工作狀態(tài)。LT、LE是它的試燈控制與鎖定允許輸入端,均已接無效電平。
C1、R52以及IC3等構(gòu)成上電復(fù)位電路,這里IC3被用作反相器。上電時(shí)+12 V的高電平通過C1加至六個(gè)十進(jìn)制計(jì)數(shù)器的Cr端使它們復(fù)位;同時(shí)這個(gè)復(fù)位信號(hào)經(jīng)IC3、G2后又加至CD4040的Cr端使它也復(fù)位。復(fù)位開關(guān)K3按下時(shí)的工作過程與此相同。
電路需要+12 V電源,可用車上的蓄電池供電。如果蓄電池電壓超過12 V,應(yīng)通過穩(wěn)壓電路供電,例如用三端穩(wěn)壓塊7812或LM317等進(jìn)行穩(wěn)壓。
3 結(jié)束語
電路只有一個(gè)參數(shù)需要調(diào)試,通過調(diào)整Rw改變IC1同相端的電壓。應(yīng)保證在霍爾集成電路H與磁鋼距離最近時(shí),該端電壓高于其反相端(即霍爾集成電路輸出端)的電壓;霍爾集成電路遠(yuǎn)離磁鋼時(shí),該端電壓低于其反相端的電壓。由于100米不可能恰好等于車輪周長的整數(shù)倍,故計(jì)量結(jié)果會(huì)產(chǎn)生誤差,其誤差的大小與車輪實(shí)際尺寸有關(guān)。對(duì)于1.834米周長的車輪。誤差為1%。當(dāng)K1置于“轉(zhuǎn)數(shù)”一邊時(shí),顯示器顯示的結(jié)果再乘以車輪周長可得到誤差更小的結(jié)果。如果相應(yīng)地增加CD4518和LED數(shù)碼管的數(shù)量,可擴(kuò)大量程。