
摘要: 介紹了TMS320LF2407 DSP在無刷直流電機(jī)控制系統(tǒng)中的應(yīng)用研究,采用了模糊控制策略,設(shè)計(jì)了上位監(jiān)控系統(tǒng),給出了數(shù)字化、智能化的實(shí)現(xiàn)方案,實(shí)踐結(jié)果證明了系統(tǒng)的平穩(wěn)性和快速性滿足要求。
1 引言
永磁無刷直流電機(jī)具有交流電機(jī)的結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、維護(hù)方便等特點(diǎn),又具有直流電機(jī)調(diào)速性能好、運(yùn)行效率高、無機(jī)械換向等優(yōu)點(diǎn),使它在機(jī)器人、數(shù)控機(jī)床、醫(yī)療器械、儀器儀表
儀器儀表
廣義的說儀器儀表也可具有自動(dòng)控制、報(bào)警、信號(hào)傳遞和數(shù)據(jù)處理等功能,如氣動(dòng)調(diào)節(jié)儀、電動(dòng)調(diào)節(jié)儀表,以及集散型儀表控制系統(tǒng)等也皆屬器儀表。儀器儀表能改善、擴(kuò)展或補(bǔ)充人的官能。如顯微鏡、望遠(yuǎn)鏡、聲級(jí)計(jì)、酸度計(jì)、高溫計(jì)等,可以擴(kuò)展人的視、聽、嘗、摸外部事物的官能;有些儀器儀表,如磁強(qiáng)計(jì)、射線計(jì)數(shù)計(jì)等,可感受和測(cè)量到人所不能感受到的物理量;還有些儀器儀表可以超過人的能力去記錄、計(jì)算和計(jì)數(shù),如高速照相機(jī)、計(jì)算機(jī)等。 [全文]
等各領(lǐng)域得到了廣泛的應(yīng)用。尤其是采用了DSP數(shù)字信號(hào)處理器、電子換向器、光電編碼器等,使得無刷直流電機(jī)的數(shù)字化、智能化控制系統(tǒng)的實(shí)現(xiàn)成為可能,也是當(dāng)今研究與應(yīng)用的熱點(diǎn)。但由于無刷直流電機(jī)本身存在非線性、數(shù)學(xué)模型難以建立等問題,單純用傳統(tǒng)的PID難以獲得較好的速度控制效果;加上以往用單片機(jī)
單片機(jī)
單片機(jī)是單片微型計(jì)算機(jī)(Single-Chip Microcomputer)的簡(jiǎn)稱,是一種將中央處理器CPU隨機(jī)存儲(chǔ)器RAM、只讀存儲(chǔ)器ROM、多種I/O口和中斷系統(tǒng)、定時(shí)器/計(jì)時(shí)器等功能(可能還包括顯示驅(qū)動(dòng)電路、脈寬調(diào)制電路、模擬多路轉(zhuǎn)換器、A/D轉(zhuǎn)換器等電路)采用超大規(guī)模集成電路技術(shù)集成到一塊硅片上構(gòu)成的微型計(jì)算機(jī)系統(tǒng)。 [全文]
實(shí)現(xiàn),線路復(fù)雜、速度慢,難以實(shí)現(xiàn)數(shù)字化、智能化控制。
本設(shè)計(jì)是在我所研制的DSP數(shù)字控制實(shí)踐開發(fā)系統(tǒng)的基礎(chǔ)上,以TMS320LF2407 DSP控制器為核心;以無刷直流電機(jī)為被控對(duì)象;以模糊PI為智能控制策略;以霍爾電流傳感器
傳感器
凡是利用一定的物性(物理、化學(xué)、生物)法則、定理、定律、效應(yīng)等把物理量或化學(xué)量轉(zhuǎn)變成便于利用的電信號(hào)的器件。傳感器是測(cè)量系統(tǒng)中的一種前置部件,它將輸入變量轉(zhuǎn)換成可供測(cè)量的信號(hào)”。按照Gopel等的說法是:“傳感器是包括承載體和電路連接的敏感元件”,而“傳感器系統(tǒng)則是組合有某種信息處理(模擬或數(shù)字)能力的系統(tǒng)”。傳感器是傳感系統(tǒng)的一個(gè)組成部分,它是被測(cè)量信號(hào)輸入的第一道關(guān)口。 [全文]
及光電編碼器為檢測(cè)手段,利用DSP速度快、運(yùn)算能力強(qiáng)、資源豐富的優(yōu)勢(shì),對(duì)無刷直流電機(jī)的控制與應(yīng)用進(jìn)行了研究。
2 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)由“PC上位機(jī)、TMS320LF2407 DSP控制器、功率驅(qū)動(dòng)模塊、無刷直流電機(jī)、檢測(cè)單元、通訊接口”等組成,如圖1所示。

2.1 DSP控制器
TMS320LF2407是一種具有高速的運(yùn)算能力與面向電機(jī)高效控制的數(shù)字信號(hào)處理器,集成了針對(duì)電機(jī)控制所需要的CPU、片內(nèi)RAM、ROM/FLASH、SCI、事件管理器等功能模塊資源。CPU具有獨(dú)立的數(shù)據(jù)總線和地址總線,高速的運(yùn)算能力,可完成復(fù)雜的控制算法與先進(jìn)的控制策略;SCI串行通訊接口與PC上位機(jī)進(jìn)行實(shí)時(shí)通訊,完成程序設(shè)計(jì)、數(shù)據(jù)采集及上位監(jiān)控等功能;事件管理器的通用定時(shí)器用于產(chǎn)生電流和速度控制周期;16位脈寬調(diào)制PWM通道產(chǎn)生的信號(hào)供給驅(qū)動(dòng)模塊IGBT,通過調(diào)整PWM的占空比,進(jìn)行電壓自動(dòng)調(diào)節(jié),實(shí)現(xiàn)對(duì)無刷直流電機(jī)的轉(zhuǎn)速和電流的控制;10位A/D轉(zhuǎn)換接口用于測(cè)量電機(jī)的定子電流;正交編碼器接口QEP用于接收光電編碼器的反饋信號(hào)并計(jì)算轉(zhuǎn)速;5個(gè)外部實(shí)時(shí)中斷用于電機(jī)驅(qū)動(dòng)保護(hù)和復(fù)位;3個(gè)捕捉單元可對(duì)電機(jī)轉(zhuǎn)子位置進(jìn)行檢測(cè)等,這些資源為實(shí)現(xiàn)無刷直流電機(jī)數(shù)字化、智能化的研究與應(yīng)用提供了極大方便,也是目前具有競(jìng)爭(zhēng)力的數(shù)字電機(jī)控制器。
2.2 無刷直流電機(jī)
采用1500轉(zhuǎn)/分,1.78A,27V電壓供電的無刷直流電機(jī),定子為三相對(duì)稱繞組,轉(zhuǎn)子是永磁體結(jié)構(gòu),采用星形接法兩相通電三相6狀態(tài)運(yùn)行方式。當(dāng)定子繞組兩相通上方波電流產(chǎn)生的磁場(chǎng)與轉(zhuǎn)子永磁磁場(chǎng)垂直時(shí),則產(chǎn)生最大的電磁轉(zhuǎn)矩驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。隨著轉(zhuǎn)子的旋轉(zhuǎn)定子電流需要不斷換相,才能保證兩個(gè)磁場(chǎng)下的電流方向不變,因此通過控制三相定子電流的通電順序和大小,就可實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。
2.3 功率驅(qū)動(dòng)模塊
功率驅(qū)動(dòng)采用東芝公司的IPM模塊,包括驅(qū)動(dòng)電路、逆變電路及保護(hù)電路,逆變電路采用6單元IGBT三相星形全橋連接驅(qū)動(dòng)方式。利用高速光耦
光耦
光耦全稱是光耦合器,英文名字是:optical coupler,英文縮寫為OC,亦稱光電隔離器,簡(jiǎn)稱光耦。它對(duì)輸入、輸出電信號(hào)有良好的隔離作用,所以,它在各種電路中得到廣泛的應(yīng)用。目前它已成為種類最多、用途最廣的光電器件之一。 [全文]
TLP550實(shí)現(xiàn)隔離驅(qū)動(dòng),使用事件管理器EVA的PWM脈沖信號(hào)控制逆變器
逆變器
逆變器(inverter)是把直流電能(電池、蓄電瓶)轉(zhuǎn)變成交流電(一般為220v50HZ正弦或方波)。應(yīng)急電源,一般是把直流電瓶逆變成220V交流的。通俗的講,逆變器是一種將直流電(DC)轉(zhuǎn)化為交流電(AC)的裝置。它由逆變橋、控制邏輯和濾波電路組成.廣泛適用于空調(diào)、家庭影院、電動(dòng)砂輪、電動(dòng)工具、縫紉機(jī)、DVD、VCD、電腦、電視、洗衣機(jī)、抽油煙機(jī)、冰箱,錄像機(jī)、按摩器、風(fēng)扇、照明等 。 [全文]
的工作狀態(tài),再根據(jù)轉(zhuǎn)子磁極的位置進(jìn)行電機(jī)定子電流實(shí)時(shí)換相的邏輯控制;通過調(diào)節(jié)PWM脈沖的占空比可改變電機(jī)繞組的平均電壓,從而控制定子電流的大小;使用可編程PWM死區(qū)控制可以防止逆變橋短路的現(xiàn)象。
2.4 定子電流檢測(cè)
電流檢測(cè)采用2個(gè)霍爾電流傳感器CSNE151,分別檢測(cè)A、B兩相的相電流(因?yàn)槿我粫r(shí)刻只有兩相通電),再整合成一直流電流,經(jīng)濾波后送DSP的A/D轉(zhuǎn)換模塊,則系統(tǒng)可采用一個(gè)電流調(diào)節(jié)器對(duì)電機(jī)的電流進(jìn)行閉環(huán)控制。
2.5 位置檢測(cè)與速度計(jì)算
轉(zhuǎn)子位置是通過3個(gè)互差120°脈沖寬度為180°的霍爾位置傳感器
位置傳感器
位置傳感器可分為兩種,直線位移傳感器和角位移傳感器。其中直線位移傳感器常用的有直線位移定位器等,具有工作原理簡(jiǎn)單、測(cè)量精度高、可靠性強(qiáng)的特點(diǎn);角位移傳感器則可選旋轉(zhuǎn)式電位器,具有可靠性高、成本低的優(yōu)點(diǎn)。角位移器還可使用光電編碼器,,有增量式與絕對(duì)式兩種形式。其中增量式碼盤在機(jī)器人控制系統(tǒng)中得到了廣泛的應(yīng)用。 [全文]
,來實(shí)時(shí)檢測(cè)轉(zhuǎn)子磁極位置的6個(gè)循環(huán)變化狀態(tài),每個(gè)60°電角度對(duì)應(yīng)電機(jī)的某一對(duì)磁極下的一個(gè)位置,轉(zhuǎn)子位置狀態(tài)每變化一次,繞組導(dǎo)通就改變一次。A、B兩路脈沖信號(hào)送入DSP的正交編碼脈沖接口單元QEP的QEP1和QEP2引腳,經(jīng)譯碼邏輯單元產(chǎn)生時(shí)鐘信號(hào)CLK和轉(zhuǎn)向信號(hào)DIR,將CLK作為定時(shí)器1的時(shí)鐘輸入,由T1對(duì)CLK進(jìn)行脈沖計(jì)數(shù),可以產(chǎn)生60°電角度脈沖信號(hào)的中斷。即根據(jù)霍爾位置傳感器的狀態(tài)信息,結(jié)合換相邏輯,DSP控制逆變器的導(dǎo)通或截止,從而控制電機(jī)定子繞組電流的換相。
速度檢測(cè)采用2000個(gè)脈沖/每轉(zhuǎn)的E6B2光電編碼器,直接將電機(jī)角度的模擬信號(hào)轉(zhuǎn)換成脈沖信號(hào),分別用定時(shí)器設(shè)置控制周期和對(duì)脈沖進(jìn)行計(jì)數(shù),實(shí)現(xiàn)鑒相、倍頻、轉(zhuǎn)速測(cè)量與閉環(huán)控制功能。系統(tǒng)各檢測(cè)狀態(tài)與換相邏輯如表1所示。
3 控制系統(tǒng)設(shè)計(jì)
3.1 系統(tǒng)方框圖
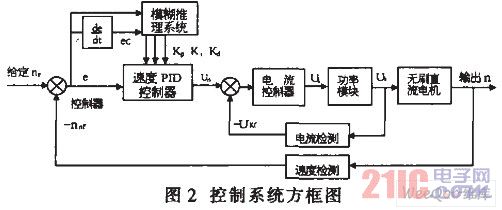
控制系統(tǒng)采用速度、電流雙閉環(huán)控制,速度環(huán)的作用是增強(qiáng)系統(tǒng)對(duì)負(fù)載變化的抗干擾能力,抑制轉(zhuǎn)速波動(dòng),為提高系統(tǒng)的動(dòng)態(tài)和靜態(tài)性能,速度環(huán)控制器采用模糊自整定PID控制算法。電流環(huán)使電流緊緊跟隨速度控制器的輸出,對(duì)系統(tǒng)的擾動(dòng)起抗干擾作用,為此電流環(huán)控制器采用PID控制算法,DSP通過速度環(huán)和電流環(huán)實(shí)時(shí)調(diào)節(jié)PWM的占空比來實(shí)現(xiàn)轉(zhuǎn)速的控制。模糊自整定PID與PID控制算法的有效結(jié)合,使系統(tǒng)具有較強(qiáng)的適應(yīng)性,確保速度主被控量的控制質(zhì)量。
控制系統(tǒng)方塊圖如圖2所示,其中nr為系統(tǒng)速度給定量;Un為速度控制器輸出的控制量;Ui為電流控制器輸出的控制量;UKf為電流環(huán)反饋量;Uk為功率模塊
功率模塊
功率模塊是功率電子電力器件按一定的功能組合再灌封成一個(gè)模塊。 [全文]
輸出的控制量;nnf為速度環(huán)反饋量;n為速度環(huán)的被控量。
3.2 模糊子集及隸屬函數(shù)
速度環(huán)控制器的轉(zhuǎn)速給定nR和轉(zhuǎn)速反饋值nnf的誤差e(E)和誤差變化率ec(EC)作為模糊控制器的輸入,以Kp、Ki、Kd作為輸出,找出PID與誤差E和誤差變化率EC的模糊關(guān)系,運(yùn)行中不斷檢測(cè)E和EC,再根據(jù)模糊控制控制原理對(duì)PID進(jìn)行在線調(diào)整,以滿足不同的E和EC下被控過程對(duì)△Kp、△Ki、△Kd的要求。
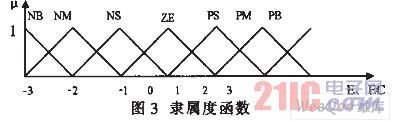
模糊子集為E=EC=△Kp=△Ki=△Kd=﹛NB,NM,NS,ZE,PS,PM,PB﹜=﹛負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大﹜;輸入變量論域?yàn)镋=EC=﹛-3,-2,-1,0,1,2,3﹜;輸出變量論域?yàn)椤鱇p=﹛-0.3,0.3﹜,△Ki=﹛-0.08,0.08﹜,△Kd=﹛-3,3﹜。隸屬度函數(shù)采用靈敏性較強(qiáng)的三角函數(shù),E、EC隸屬度函數(shù)如圖3所示。
3.3 模糊控制規(guī)則設(shè)計(jì)
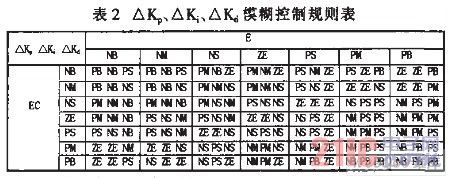
速度環(huán)模糊控制規(guī)則采用if(條件) and then(結(jié)果)的形式表達(dá),根據(jù)經(jīng)驗(yàn)并通過反復(fù)調(diào)試得到下述49條控制規(guī)則,模糊控制規(guī)則如表2所示。
(1) if E is NB and EC is NB then △Kp is PB,△Ki is NB,△Kd is PS;
(2) if E is NB and EC is NM then △Kp is PB,△Ki is NB,△Kd is NS;
┋
(49) if E is PB and EC is PB then △Kp is NB,△Ki is PB,△Kd is PB。
3.4 模糊推理與模糊判決
根據(jù)模糊控制規(guī)則,求出△KP、△Ki、△Kd的隸屬度P△K、i△K、d△K;采用加權(quán)平均法計(jì)算出輸出量△Kp、△Ki、△Kd的確定值;再將Kp、Ki、Kd的代入PID控制算法中,計(jì)算出速度環(huán)輸出的控制量Un,完成了PID參數(shù)的在線自整定過程。
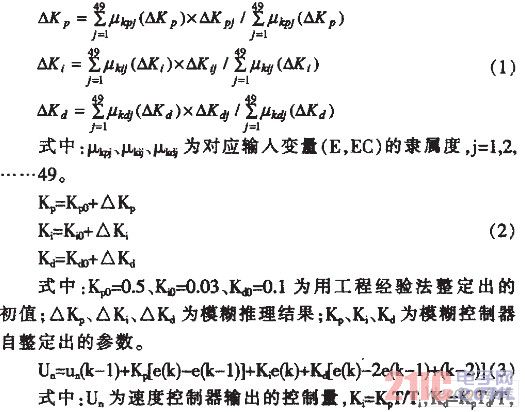
T=10ms為采樣周期。
3.5 控制程序設(shè)計(jì)
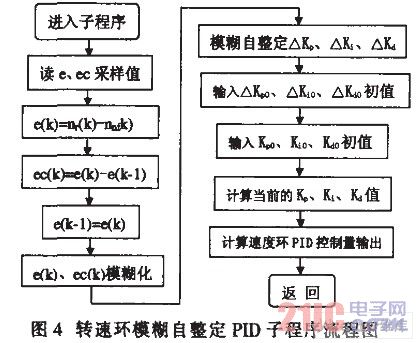
在TMS320LF2407 DSP控制器上,采用C語言和模塊化設(shè)計(jì)方法,設(shè)計(jì)出速度控制器和電流控制器的應(yīng)用程序,包括主程序、模糊自整定PID子程序、PID程序、中斷子程序等,完成初始化、參數(shù)給定、數(shù)據(jù)采集、運(yùn)算與轉(zhuǎn)換、控制算法、控制量輸出、PWM與ADC中斷、邏輯換相、故障檢測(cè)等,實(shí)現(xiàn)了對(duì)直流無刷電機(jī)的實(shí)時(shí)控制。模糊自整定PID子程序如圖4所示。
4 通訊與監(jiān)控系統(tǒng)設(shè)計(jì)
采用現(xiàn)場(chǎng)總線Modbus和上位監(jiān)控技術(shù),設(shè)計(jì)了通訊與監(jiān)控系統(tǒng)的硬件電路和軟件程序。用C語言和中斷程序法設(shè)計(jì)了下位機(jī)通訊程序,包括端口初始化、確定通訊波特率、校驗(yàn)位、奇偶位、地址等。用VB語言的通訊控件MSComm對(duì)通訊端口進(jìn)行初始化和通訊格式確定,并應(yīng)用面向?qū)ο蟮某绦蚍椒ㄔO(shè)計(jì)了上位監(jiān)控系統(tǒng),包括系統(tǒng)命令、趨勢(shì)組態(tài)、功能組態(tài)、狀態(tài)檢測(cè)等,如按下系統(tǒng)命令中的“參數(shù)設(shè)置”功能按鈕,可進(jìn)行速度給定nr,Kp0、Ki0、Kd0初值等值的設(shè)定;按下“顯示設(shè)置”可觀察Kp、Ki、Kd、n等實(shí)時(shí)參數(shù)。實(shí)現(xiàn)了上、下位機(jī)通過現(xiàn)場(chǎng)總線Modbus進(jìn)行信息交換,人-機(jī)界面友好,操作方便靈活。
5 系統(tǒng)調(diào)試結(jié)果
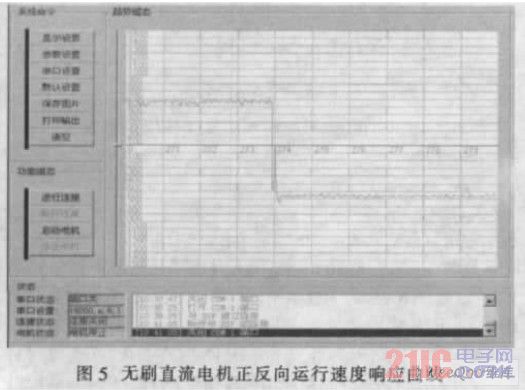
系統(tǒng)速度環(huán)給定為650轉(zhuǎn)/分,啟動(dòng)并運(yùn)行系統(tǒng),由上位機(jī)監(jiān)控的可視化運(yùn)行曲線可知,速度響應(yīng)快,無超調(diào),調(diào)節(jié)時(shí)間短,能快速實(shí)現(xiàn)正、反向運(yùn)行,獲得了較好的的起動(dòng)性能與運(yùn)行性能,滿足了無刷直流電機(jī)系統(tǒng)對(duì)速度調(diào)節(jié)的平穩(wěn)性和快速性的要求,轉(zhuǎn)速特性如圖5所示。
6 結(jié)束語
本文的創(chuàng)新點(diǎn)是融合了“現(xiàn)場(chǎng)總線,智能控制,數(shù)字檢測(cè),上位監(jiān)控”等多種先進(jìn)技術(shù),充分利用了DSP速度快、運(yùn)算能力強(qiáng)、資源豐富的優(yōu)勢(shì);發(fā)揮了模糊自整定PID和PID控制算法的優(yōu)勢(shì),使系統(tǒng)具有較快的響應(yīng)速度和抗參數(shù)變化的魯棒性;設(shè)計(jì)的通訊與上位監(jiān)控系統(tǒng),實(shí)現(xiàn)了系統(tǒng)的實(shí)時(shí)監(jiān)控與遠(yuǎn)程控制,方便靈活,實(shí)際調(diào)試結(jié)果證明了該設(shè)計(jì)的有效性。我所研制的DSP實(shí)踐開發(fā)系統(tǒng)已在高校和企業(yè)培訓(xùn)中心得到了應(yīng)用,并具有較好的推廣前景