
隨著技術(shù)的進步和市場需求的變化,鐵路機車車輛工業(yè)對列車微機控制系統(tǒng)中的車載數(shù)據(jù)通信網(wǎng)絡提出了新的要求,期望建立一個在機車車輛內(nèi)部及列車和地面控制系統(tǒng)之間交換控制命令、狀態(tài)、故障診斷信息以及旅客信息等的數(shù)據(jù)通信網(wǎng)絡。為此,國際電工委員會制定了IEC61375—1:1999《列車通信網(wǎng)絡》,它包括2種總線,即列車總線WTB和多功能車輛總線MVB,分別用來連接列車的各個車廂和車廂內(nèi)的電氣設備。本文結(jié)合“北亞”號內(nèi)燃動車組,研究基于TCN技術(shù)的內(nèi)燃動車組列車通訊網(wǎng)絡。
“北亞”號內(nèi)燃動車組是一種自帶動力、具有載客功能、成組運行的軌道交通工具,動車組設頭尾2輛動車,中間由幾節(jié)拖車組成。司機在頭車操縱,尾車不配司機。頭尾2輛車控制系統(tǒng)完全相同,并相互聯(lián)鎖,尾車控制系統(tǒng)通過列車通訊網(wǎng)絡接收頭車操縱指令,頭尾2輛車同步工作,頭車的監(jiān)控信息在頭車直接顯示,尾車的監(jiān)控信息可以通過通訊網(wǎng)絡在頭車司機臺顯示,司機在頭車上可以操縱2臺動車的各個工況。該列車通訊網(wǎng)絡可完成頭尾2輛動車的重聯(lián)控制、監(jiān)測并實施安全保護。
1 動車組列車通信網(wǎng)絡拓撲結(jié)構(gòu)
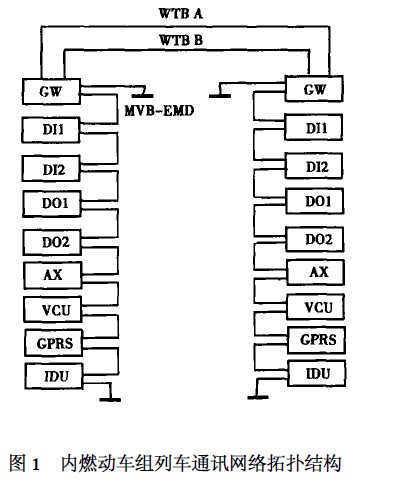
“北亞”號內(nèi)燃動車組采用列車控制與通訊網(wǎng)絡系統(tǒng)對整列車進行控制,網(wǎng)絡拓撲結(jié)構(gòu)如圖1所示。按照TCN標準,列車通訊網(wǎng)絡分為2級,第1級為絞線式列車總線WTB,實現(xiàn)車輛間的數(shù)據(jù)通信;第2級為多功能車輛總線MVB,主要實現(xiàn)同一車輛內(nèi)各個功能控制單元之間的數(shù)據(jù)通信。
每臺動車由1個微機控制裝置和1個智能顯示單元組成。在頭尾2輛動車上各裝有1臺控制機箱,每臺機箱中裝有數(shù)字量輸入/輸出單元(DI/DO)、模擬量輸入/輸出單元(AX)、車輛控制單元(VCU)、無線數(shù)據(jù)傳輸單元(GPRS板)、網(wǎng)關(guān)(GW)和智能顯示單元(IDU)。2臺控制機箱間采用WTB通訊;每臺控制箱內(nèi)各單元之間采用MVB通訊,其介質(zhì)采用電氣中距離介質(zhì)EMD。
2 列車控制與通信網(wǎng)絡系統(tǒng)的組成
列車控制與通信網(wǎng)絡系統(tǒng)采用通用的EXP機箱,機箱為背板式結(jié)構(gòu)。以C8051F040CPU為核心,由開關(guān)電源、數(shù)字量輸入/輸出、模擬量輸入/輸出、無線數(shù)據(jù)傳輸單元等組成,各單元通過MVB總線與CPU進行數(shù)據(jù)交換。各插件功能介紹如下。
2.1 開關(guān)電源
采用開關(guān)電源技術(shù),將輸入24V電源變換為+5V和±15V電源,給機箱、網(wǎng)關(guān)、輸入輸出單元及傳感器供電。
2.2 數(shù)字量輸入/輸出
采用光電隔離技術(shù),接收司機控制指令及動車狀態(tài)信號,完成動車邏輯控制。
2.3 模擬量輸入/輸出
對動車速度、柴油機轉(zhuǎn)速、柴油機潤滑油壓力、柴油機冷卻水溫度信號進行采樣。
2.4 無線通訊模塊
無線數(shù)據(jù)傳輸單元是利用通用分組無線業(yè)務GPRS將動車組現(xiàn)場采集的數(shù)據(jù)傳輸?shù)降孛姹O(jiān)控站,供相關(guān)人員對機車的運行狀態(tài)進行監(jiān)控。
2.5 車輛控制單元VCU
VCU主要實現(xiàn)系統(tǒng)的邏輯控制功能,其組成如圖2所示。具有RS—232、RS—485、CAN以及MVB通信接口,其中RS—485和CAN為功能擴充預留。
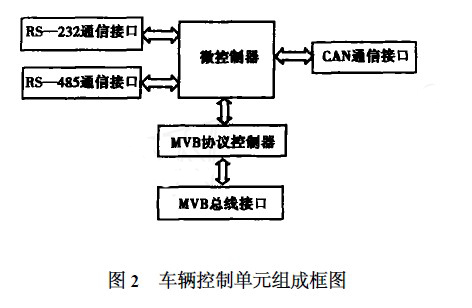
VCU采用C8051F040單片機,其速度可達25MIPS(使用25MHz時鐘)。具有4352字節(jié)內(nèi)部數(shù)據(jù)RAM(4K+256)和64KBFLASH。
隨著技術(shù)的進步和市場需求的變化,鐵路機車車輛工業(yè)對列車微機控制系統(tǒng)中的車載數(shù)據(jù)通信網(wǎng)絡提出了新的要求,期望建立一個在機車車輛內(nèi)部及列車和地面控制系統(tǒng)之間交換控制命令、狀態(tài)、故障診斷信息以及旅客信息等的數(shù)據(jù)通信網(wǎng)絡。為此,國際電工委員會制定了IEC61375—1:1999《列車通信網(wǎng)絡》,它包括2種總線,即列車總線WTB和多功能車輛總線MVB,分別用來連接列車的各個車廂和車廂內(nèi)的電氣設備。本文結(jié)合“北亞”號內(nèi)燃動車組,研究基于TCN技術(shù)的內(nèi)燃動車組列車通訊網(wǎng)絡。
“北亞”號內(nèi)燃動車組是一種自帶動力、具有載客功能、成組運行的軌道交通工具,動車組設頭尾2輛動車,中間由幾節(jié)拖車組成。司機在頭車操縱,尾車不配司機。頭尾2輛車控制系統(tǒng)完全相同,并相互聯(lián)鎖,尾車控制系統(tǒng)通過列車通訊網(wǎng)絡接收頭車操縱指令,頭尾2輛車同步工作,頭車的監(jiān)控信息在頭車直接顯示,尾車的監(jiān)控信息可以通過通訊網(wǎng)絡在頭車司機臺顯示,司機在頭車上可以操縱2臺動車的各個工況。該列車通訊網(wǎng)絡可完成頭尾2輛動車的重聯(lián)控制、監(jiān)測并實施安全保護。
1 動車組列車通信網(wǎng)絡拓撲結(jié)構(gòu)
“北亞”號內(nèi)燃動車組采用列車控制與通訊網(wǎng)絡系統(tǒng)對整列車進行控制,網(wǎng)絡拓撲結(jié)構(gòu)如圖1所示。按照TCN標準,列車通訊網(wǎng)絡分為2級,第1級為絞線式列車總線WTB,實現(xiàn)車輛間的數(shù)據(jù)通信;第2級為多功能車輛總線MVB,主要實現(xiàn)同一車輛內(nèi)各個功能控制單元之間的數(shù)據(jù)通信。
每臺動車由1個微機控制裝置和1個智能顯示單元組成。在頭尾2輛動車上各裝有1臺控制機箱,每臺機箱中裝有數(shù)字量輸入/輸出單元(DI/DO)、模擬量輸入/輸出單元(AX)、車輛控制單元(VCU)、無線數(shù)據(jù)傳輸單元(GPRS板)、網(wǎng)關(guān)(GW)和智能顯示單元(IDU)。2臺控制機箱間采用WTB通訊;每臺控制箱內(nèi)各單元之間采用MVB通訊,其介質(zhì)采用電氣中距離介質(zhì)EMD。
2 列車控制與通信網(wǎng)絡系統(tǒng)的組成
列車控制與通信網(wǎng)絡系統(tǒng)采用通用的EXP機箱,機箱為背板式結(jié)構(gòu)。以C8051F040CPU為核心,由開關(guān)電源、數(shù)字量輸入/輸出、模擬量輸入/輸出、無線數(shù)據(jù)傳輸單元等組成,各單元通過MVB總線與CPU進行數(shù)據(jù)交換。各插件功能介紹如下。
2.1 開關(guān)電源
采用開關(guān)電源技術(shù),將輸入24V電源變換為+5V和±15V電源,給機箱、網(wǎng)關(guān)、輸入輸出單元及傳感器供電。
2.2 數(shù)字量輸入/輸出
采用光電隔離技術(shù),接收司機控制指令及動車狀態(tài)信號,完成動車邏輯控制。
2.3 模擬量輸入/輸出
對動車速度、柴油機轉(zhuǎn)速、柴油機潤滑油壓力、柴油機冷卻水溫度信號進行采樣。
2.4 無線通訊模塊
無線數(shù)據(jù)傳輸單元是利用通用分組無線業(yè)務GPRS將動車組現(xiàn)場采集的數(shù)據(jù)傳輸?shù)降孛姹O(jiān)控站,供相關(guān)人員對機車的運行狀態(tài)進行監(jiān)控。
2.5 車輛控制單元VCU
VCU主要實現(xiàn)系統(tǒng)的邏輯控制功能,其組成如圖2所示。具有RS—232、RS—485、CAN以及MVB通信接口,其中RS—485和CAN為功能擴充預留。
VCU采用C8051F040單片機,其速度可達25MIPS(使用25MHz時鐘)。具有4352字節(jié)內(nèi)部數(shù)據(jù)RAM(4K+256)和64KBFLASH。
VCU的主要功能有:
(1)實現(xiàn)動車組的柴油機、輔助發(fā)電機、空氣壓縮機等設備的邏輯控制及故障診斷功能。
(2)頭尾2輛動車的VCU依靠司機鑰匙檔位定義主控微機信號來確定主控微機。當1臺VCU被定義為主控微機時,則另一臺VCU為從控微機。從控微機不具有MVB總線管理器功能。
(3)實現(xiàn)防空轉(zhuǎn)/防滑控制功能。在牽引或制動工況下,系統(tǒng)檢測輪根據(jù)空轉(zhuǎn)或滑行程度的不同,采取撒沙、降功、卸載等保護措施,以充分利用動車粘著性能,發(fā)揮牽引力。
(4)具有柴油機與動車電氣系統(tǒng)保護功能。動車微機實時檢測柴油機溫度、壓力、轉(zhuǎn)速等信號。若這些信號超過正常工作范圍,則根據(jù)故障的不同種類分別采取報警、降功、卸載、停機等措施對其進行保護并記錄,確保柴油機和換檔機構(gòu)的正常工作。
3 列車TCN網(wǎng)絡通信及重聯(lián)控制
通信采用TCN網(wǎng)絡,取消了以往動車組頭尾2輛動車之間的所有硬連線。為了提高可靠性,采用雙通道熱備冗余控制方案,即采用2路WTB總線同時傳遞數(shù)據(jù),當一路發(fā)生故障時,由軟件自動完成轉(zhuǎn)換。
3.1 TCN網(wǎng)絡的組成
3.1.1 組成
該列車通訊網(wǎng)絡完全符合TCN標準。網(wǎng)絡上設有2個WTB節(jié)點,頭尾2輛動車上各1個。列車總線WTB和多功能車輛總線MVB通過網(wǎng)關(guān)連接。
車廂總線MVB上附掛有模擬量輸入/輸出單元、數(shù)字量輸入/輸出單元、車輛控制單元、智能顯示單元和無線通訊單元,這些單元通過MVB總線連接起來,傳遞相應的數(shù)據(jù)信息。
3.1.2 車輛控制單元與網(wǎng)絡的數(shù)據(jù)通信方式
主CPU與網(wǎng)絡通過UART仿真技術(shù)交換數(shù)據(jù)。
主CPU采用查詢方式定時從輸入緩沖區(qū)中讀取2個網(wǎng)絡節(jié)點的信息,并進行校驗。當校驗正確時,返回正確標志,將數(shù)據(jù)提供給本車使用;反之,若校驗出錯,則返回錯誤標志,將所收到的數(shù)據(jù)丟棄。當主微機的數(shù)據(jù)需要更新時,主CPU向輸出緩沖區(qū)寫數(shù)據(jù)供他車使用。正常情況下,2個網(wǎng)絡節(jié)點是同時工作的,并通過2根WTB總線實現(xiàn)冗余。當主CPU檢測到一路通信故障時,由網(wǎng)關(guān)中的軟件識別并自動轉(zhuǎn)換到另一路,并在顯示器上提示該路網(wǎng)絡通信故障。
3.1.3 網(wǎng)關(guān)的配置
在該動車組的列車控制與通信網(wǎng)絡系統(tǒng)中,采用捷克Unicontrols公司生產(chǎn)的網(wǎng)關(guān)。該網(wǎng)關(guān)在購買時帶有底層軟件,在應用層面上只需根據(jù)需要對網(wǎng)關(guān)進行相應配置即可(包括動車組的組成、車廂的類型、車廂內(nèi)的設備、通信存儲器及端口的配置等)。
3.2 TCN列車通信網(wǎng)絡的功能
3.2.1 列車重聯(lián)控制功能
頭車將司機控制指令及動車狀態(tài)信號傳送給尾車,可實現(xiàn)尾車無人駕駛。尾車檢測動車狀態(tài)信號傳送給頭車,以便司機了解他車運行情況,確保列車工況一致。
3.2.2 頭尾2輛車監(jiān)控數(shù)據(jù)通信功能
頭尾2輛車實時檢測動車及柴油機的速度、檔位、方向、溫度、壓力等信號,通過網(wǎng)絡傳遞給智能顯示單元顯示,以便司機及時了解列車的運行信息,確保列車正常運行。
3.3 動車組重聯(lián)控制邏輯
3.3.1 操縱端控制
為了防止控制邏輯錯誤,首先必須確定操縱端。
在該網(wǎng)絡中,通過司機鑰匙來確定操縱端。司機鑰匙在“ON”位置的動車為操縱端,另一動車為尾車。若兩動車同時設置為操縱端,則顯示“操縱端設置錯誤”,兩車控制均處于無效狀態(tài)。
3.3.2 工況控制
頭車完成本車的所有控制功能,實時檢測工況、方向、司機控制器手柄等信號,并將相應的控制指令通過TCN網(wǎng)絡傳給尾車,同時將尾車的狀態(tài)通過指示燈顯示在司機臺上。尾車接受頭車指令,控制尾車相應的繼電器動作,檢測動作正確后,完成動車相應檔位加減載控制,否則不加載并提示尾車工況錯誤。
4 智能顯示單元
4.1 智能顯示單元的組成及軟件
智能顯示單元主要用于顯示連接到列車總線上的各子系統(tǒng)的狀態(tài)、列車基本運行數(shù)據(jù)、列車狀態(tài)信息和故障診斷信息。智能顯示單元由彩色液晶觸摸屏、PC104嵌入式模塊、網(wǎng)絡接口卡、顯示卡等組成,司機通過觸摸屏,可了解動車運行情況和查詢故障信息。
智能顯示單元的應用軟件采用北京昆侖通態(tài)公司的MCGS全中文工業(yè)自動化控制組態(tài)軟件編寫。軟件編寫時通過對MVB邏輯端口進行配置,并將MVB邏輯端口和MCGS軟件中的數(shù)據(jù)變量連接起來,通過編寫腳本程序進行不同量綱間的轉(zhuǎn)換和實現(xiàn)過程數(shù)據(jù)顯示功能。軟件在PC機上調(diào)試通過后,下載到智能顯示單元的CF卡上,然后在智能顯示單元的Win2dowsCE操作系統(tǒng)下運行。
4.2 智能顯示單元的主要功能
該智能顯示單元為司機及維護人員提供了良好的人機接口。具體功能如下:
(1)實時顯示動車運行參數(shù),如動車組運行速度、柴油機轉(zhuǎn)速、溫度、壓力、工況等;
(2)以不同顏色的指示燈顯示動車的故障信息,如柴油機超速、動車組超速、柴油機滑油壓力低、柴油機水溫高等,并進行相應故障處理,如報警、降功、卸載等;
(3)日歷、時間顯示及校正;
(4)查詢動車故障;
(5)完成動車輪徑值修改。
5 結(jié)語
從內(nèi)燃動車組TCN網(wǎng)絡控制系統(tǒng)運行情況看,該系統(tǒng)工作可靠,能滿足內(nèi)燃動車組控制要求。但由于該控制系統(tǒng)的車輛控制單元采用C8051F040微處理器,其運算速度有限,存儲空間較小,不能存儲歷史故障數(shù)據(jù)。隨著計算機技術(shù)、嵌入式系統(tǒng)的發(fā)展,采用帶有嵌入式系統(tǒng)的車輛控制單元并采用圖形化編程軟件,使所開發(fā)的TCN網(wǎng)絡達到國外同類產(chǎn)品的水平,從而開發(fā)出具有自主知識產(chǎn)權(quán)的列車控制與通信網(wǎng)絡產(chǎn)品,是將來研究中要解決的主要問題。