
引言
近年來,隨著微電子技術(shù)、電力電子技術(shù)、現(xiàn)代控制技術(shù)、材料技術(shù)的迅速發(fā)展以及電機制造工藝水平的逐步提高,交流永磁同步電機以其體積小、結(jié)構(gòu)簡單等特點在工農(nóng)業(yè)、日常生活以及許多高科技中迅速得到了廣泛的應(yīng)用。因此,研究設(shè)計高精度、高性能的永磁同步電機成為現(xiàn)代電伺服驅(qū)動系統(tǒng)的一個發(fā)展趨勢。
伺服驅(qū)動器按照功能特征可分為功率板和控制板兩個獨立的模塊,本文在分析交流永磁同步電機控制性能的基礎(chǔ)上分別對控制單元和功率驅(qū)動單元進行了具體的設(shè)計。控制單元作為伺服系統(tǒng)的核心,要求有較高的性能,為此,論文采用意法半導(dǎo)體推出的STM32作為控制核心芯片。它是基于ARM先進架構(gòu)的Cortex-M3為內(nèi)核的32位微處理器,主頻可高達72 MHz。強大的內(nèi)核及其豐富的外設(shè)使其在馬達控制應(yīng)用領(lǐng)域得到廣泛的使用。功率驅(qū)動單元應(yīng)用了IPM(智能功率模塊),與以往的IGBT相比較,IPM FSAM20SH60A內(nèi)部集成欠電壓、過電流和溫度檢測等保護電路,簡化了伺服系統(tǒng)單元的設(shè)計,實現(xiàn)了伺服系統(tǒng)的模塊化和微型化。
1 PMSM伺服系統(tǒng)的基本構(gòu)架
PMSM控制系統(tǒng)的原理構(gòu)成如圖1所示,它包括主電路、伺服控制單元、功率驅(qū)動單元、保護單元以及信號反饋采集單元。

伺服控制單元包括位置控制器、速度控制器、轉(zhuǎn)矩和電流控制器等。STM32 Cortex-M3以其價格低、功耗小、性能高、處理速度快等優(yōu)點成為伺服驅(qū)動系統(tǒng)的控制核心的一種趨勢。功率驅(qū)動單元采用以智能功率模塊IPM為核心設(shè)計的驅(qū)動芯片,IPM內(nèi)部集成了驅(qū)動電路,同時具有過電壓、過電流、過熱、欠電壓等故障檢測保護電路,當系統(tǒng)出現(xiàn)問題時能及時進行自我保護,提高了系統(tǒng)的可靠性。各采集信號經(jīng)過反饋傳輸?shù)絊TM32內(nèi)部,進行精確、快速的處理后輸出,以實現(xiàn)各個部件的實時性控制。在主回路中還加入軟啟動電路,以減小啟動過程對驅(qū)動器的沖擊。
2 伺服驅(qū)動系統(tǒng)的硬件設(shè)計
功率驅(qū)動模塊作為伺服系統(tǒng)的強電部分包括兩個單元:一是開關(guān)電源單元為整個系統(tǒng)提供數(shù)字和模擬電源,二是功率驅(qū)動單元IPM用于電機的驅(qū)動。功率版的設(shè)計中包括6個硬件保護功能,分別是單相過流(正反向電流)保護、母線過流(正反向電流)保護、剎車過流(正反向電流)保護、母線過壓保護、母線欠壓保護、溫度過高保護。每路保護都有LED報警顯示,同時為了增強可靠性,保護發(fā)生后都會分別給MCU和柵極驅(qū)動器發(fā)送關(guān)斷信號,保護功率器件IPM,防止元件的損壞,而且該信號必須要求單獨的復(fù)位信號才能取消,否則保護電路會一直起作用,防止誤操作損壞設(shè)備和影響人身安全。
2.1 TOP—Switch開關(guān)電源
由TOP—Switch系列芯片構(gòu)成的應(yīng)用電路具有最低的成本和元器件數(shù)目,AC/DC轉(zhuǎn)換效率高達90%,芯片內(nèi)部還集成了自動復(fù)位啟動和限流功能電路。為了實現(xiàn)電源系統(tǒng)的安全保護,芯片內(nèi)部還具有一個觸發(fā)式熱關(guān)斷電路,可構(gòu)成反激式、正激式、升壓式和降壓式結(jié)構(gòu)的電源電路。本文采用TOP-222芯片設(shè)計了一款反激式開關(guān)電源,輸出4路獨立+15 V電源為逆變器的上下橋臂提供控制電源,保證逆變器的穩(wěn)定工作,通過穩(wěn)壓管可轉(zhuǎn)換成電路中其他器件提供所需的工作電壓。
2.2 IPM工作原理
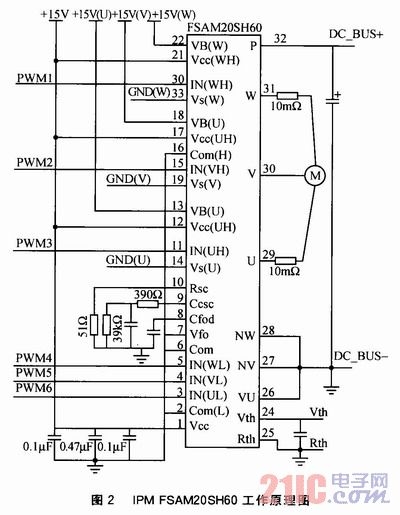
功率驅(qū)動芯片采用FSAM20SH60,輸出100~253 V交流電壓,最大驅(qū)動功率1.5 kW,開關(guān)頻率可達15 kHz。內(nèi)部集成了電壓、電流保護電路,當系統(tǒng)出現(xiàn)故障時可及時切斷輸出電流,保護電機不被燒毀。如圖2所示,STM32內(nèi)部通過相應(yīng)的算法輸出6路PWM信號,經(jīng)光耦HCPL-4050隔離放大后作為IPM的輸入信號,來控制逆變橋的導(dǎo)通與關(guān)斷,從而實現(xiàn)對電機轉(zhuǎn)速的精確控制。其中,逆變器的每個上橋壁分別采用獨立的控制電源以提高系統(tǒng)的可靠性,這個獨立的電源由開關(guān)電源來提供。
2.3 溫度檢測電路
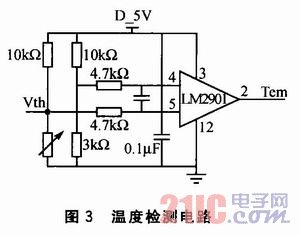
IPM芯片內(nèi)部集成了溫度保護功能,圖3為IPM驅(qū)動芯片的溫度檢測電路。芯片內(nèi)部含有熱敏電阻,當溫度過高時就會通過檢測電路的電壓比較器輸出故障信號反饋給IPM芯片的7引腳,在芯片內(nèi)部經(jīng)分析處理后采取及時的措施對系統(tǒng)進行保護,如將IGBT軟遮斷,當溫度正常時再解除保護。
2.4 電流檢測電路
對于數(shù)字化伺服電機控制系統(tǒng),轉(zhuǎn)矩環(huán)的性能直接影響著系統(tǒng)的控制性能。電流采樣的精度和實時性很大程度上決定了系統(tǒng)的動靜態(tài)性能,精確的電流檢測是提高系統(tǒng)控制精確、穩(wěn)定性和快速性的重要環(huán)節(jié)。在伺服控制系統(tǒng)中電流檢測的方法有多種,常見的一種是采用霍爾電流傳感器,將電流信號經(jīng)過電磁轉(zhuǎn)換變?yōu)橹绷麟妷盒盘栞敵觯缓蠼?jīng)運算比較電路處理后輸出到控制芯片。另一種方式是采用電流檢測,論文即采取這種檢測方式。圖4為電流檢測電路,取采樣電阻兩端的電壓經(jīng)線性光耦HCPL-7840隔離、放大后輸入到電壓比較運算放大器,再將比較后的值輸入到控制芯片STM32中進行準確的計算,從而得出當前的電流值。由于PMSM為三相對稱電機,即Ia+Ib+Ic=0,因此,研究檢測其中兩相就能得到三相電流。

3 STM32驅(qū)動PMSM原理及實現(xiàn)
控制模塊作為電機驅(qū)動的弱電部分,是電機的控制核心,也是伺服驅(qū)動技術(shù)核心控制算法的運行載體。控制芯片性能的優(yōu)劣直接影響整個伺服系統(tǒng)的動態(tài)性能。意法半導(dǎo)體的STM32是采用基于ARM工業(yè)標準嵌入式處理器Cortex-M3為內(nèi)核的32位微處理器,主頻可高達72MHz,內(nèi)置Flash和SRAM(容量可分別高達512 KB和64 KB)。強大的內(nèi)核及其豐富的外設(shè),使其在無刷馬達控制應(yīng)用領(lǐng)域得到了廣泛的使用。馬達控制配套軟件庫V2.0包含電機矢量控制函數(shù)庫,新增支持單旁路無傳感器控制、內(nèi)部永磁(IPM)電機控制和永磁同步(PMSM)電機弱磁控制的算法,極大地簡化了電機的控制,縮短了研發(fā)周期。基于此,論文選取STM32作為控制核心芯片,針對PMSM的控制提出了FOC+SVPWM控制算法。FOC(矢量控制)的應(yīng)用使得交流PMSM具有直流電機一樣的特性,解決了交流電機強耦合、非線性的問題,提高了系統(tǒng)的動態(tài)性能,實現(xiàn)對PMSM電流、轉(zhuǎn)速雙閉環(huán)的控制。
3.1 FOC+SVPWM的控制原理
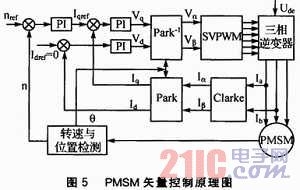
矢量控制的實質(zhì)是坐標變換,即將PMSM三相定子電流Ia、Ib經(jīng)過Clarke 3/2變換成兩相靜止坐標系中的Iα、Iβ,再經(jīng)過Park變換得到兩相旋轉(zhuǎn)坐標系中的Id、Iq。通常在控制時令I(lǐng)d=0,實現(xiàn)定子繞組與d軸的完全解耦,從而可以很好地控制電磁轉(zhuǎn)矩,這與永磁直流電機的控制原理類似。電壓空間矢量控制SVPWM是根據(jù)逆變器功率開關(guān)管的開關(guān)狀態(tài)和導(dǎo)通順序?qū)A形空間旋轉(zhuǎn)磁場分成6個扇區(qū),根據(jù)定子上反饋的電流值大小和給定值的比較來確定當前所處的扇區(qū),通過相應(yīng)的控制算法輸出6路PWM信號控制逆變器橋開關(guān)管的導(dǎo)通和關(guān)斷時間,實現(xiàn)對電機的調(diào)速控制。圖5為PMSM矢量控制的原理圖。
3.2 STM32實現(xiàn)電流、轉(zhuǎn)速環(huán)的控制算法
在函數(shù)FOC_Model(MC_FOC_DRIVE.c)中,當電流轉(zhuǎn)換開始即執(zhí)行如下的算法流程。首先讀取三相定子電流Ia、Ib,然后進行Clarke函數(shù)變換得到兩項靜止坐標系中的電流Iα、Iβ,再經(jīng)過Park函數(shù)得到兩相旋轉(zhuǎn)坐標系中的Id、Iq。給定轉(zhuǎn)速與反饋轉(zhuǎn)速進行PI調(diào)節(jié)后,輸出信號作為電流環(huán)的輸入給定信號Iqref。Id的給定值Idref=0,轉(zhuǎn)矩電流Iq和勵磁電流Id分別經(jīng)過PI調(diào)節(jié)和限幅控制后經(jīng)過Park反變換得到兩相旋轉(zhuǎn)坐標系Vd、Vq,由Vd、Vq的值判斷空間矢量的扇區(qū)號S,從而實現(xiàn)對電機轉(zhuǎn)速的調(diào)節(jié)和控制。
3.3 高精度PWM產(chǎn)生
STM32可提供13.8 ns的定時精度,其內(nèi)部高級定時器是由一個自動重裝載的16位計數(shù)器組成,可輸出高精度的PWM波形(輸出比較PWM、嵌入“死區(qū)”的互補PWM)。PWM的輸出模式有邊沿和中心對稱兩種模式,由于中心對稱模式下PWM波形沒有精度損失,因此,論文選取中心對稱模式下的7路帶死區(qū)互補輸出的PWM作為驅(qū)動芯片的控制信號。
電機控制PWM信號是由TIMx_ARR寄存器確定頻率,由TIMx_CCRx寄存器確定占空比,示波器上讀出的6路PWM信號及控制逆變器工作輸出的電流波形圖如圖6所示。

STM32控制電機的主程序中應(yīng)包含如下兩個函數(shù):STM32F10x-MCconf.h,定義用于選定的電流反饋類型;MC_Control_Param.h,定義PWM頻率,死區(qū)時間(ns)及寄存器更新率REP_RATE。
結(jié)語
本文所設(shè)計的基于STM32的交流PMSM控制,結(jié)合先進的IPM功率逆變器,簡化了硬件電路的設(shè)計,充分利用以Cotex-M3為內(nèi)核的STM32的優(yōu)勢,其豐富的固件庫函數(shù)縮短了開發(fā)周期。圓網(wǎng)印花機的實踐應(yīng)用表明,基于STM32的交流PMSM具有良好的動態(tài)性能,符合工業(yè)控制的需求。