
本文提出了一種全新的數字化的雙向微型無線內窺鏡系統, 該系統具有可實時觀察病人消化道圖像、全消化道檢查、提供三維深度圖像數據等功能。
對消化道疾病的檢查, 目前最常用和最直接有效的方法就是內窺鏡檢查, 它在消化道疾病的診斷中起著極為重要的作用。但現有的常用內窺鏡系統都不得不帶有引導插管, 給系統操作帶來不便, 同時給檢查病人也帶來很大的痛苦, 而且檢查的部位受到限制, 無法實現對小腸部分的檢查。隨著微電子技術的發(fā)展, 以色列人開發(fā)出了無線內窺鏡系統[1],其發(fā)展還在起步階段, 存在一些局限性, 比如圖像分辨率不夠高、僅是一個單向數據通信系統、醫(yī)生無法現場實時觀察病人消化道圖像、不能控制體內膠囊的工作狀態(tài)、膠囊內電池供電時間有限(6~8 小時)、無法實現大腸部分的檢查、只能實現二維圖像的采集等。另外,韓國人Park 和Nam[2]也提出了一個基于模擬電路的無線內窺鏡系統,其主要貢獻在于在無線內窺系統中引入了雙向通信的概念。
1 系統特點
表1 是上面介紹的三個系統主要性能指標比較。如表1 所示,本系統與其它兩種無線消化內窺鏡系統相比具有如下特點:(1) 采用帶數字圖像輸出的低功耗CMOS圖像傳感器,圖像尺寸最大可達VGA 大小,比以色列人研制的小腸膠囊內窺鏡圖像大約四倍;(2)能實時觀察病人消化道圖像,圖像幀率為2 幀/秒;(3)利用各種能源的管理與控制實現全消化道檢查;(4)提供三維深度內窺圖像數據;(5)采用雙向數據通信;(6)內窺圖像的壓縮率以及圖像尺寸可控;(7)體內無線收發(fā)的數字式內窺鏡膠囊攝像裝置內電路的工作狀態(tài)能受外部控制,以延長體內電池的壽命;(8)該數字式無線內窺鏡系統提供三種可供選擇的系統工作方式[3]:在線工作模式、離線工作模式以及在線與離線結合模式。數字化的微型無線內窺鏡系統示意圖如圖1 所示。
表1 三種無線內窺鏡系統性能比較

注:“-”表示未公開

2 系統硬件結構
如圖2 所示, 整個系統的硬件結構由三部分組成:(1)體內膠囊部分:包括具有無線收發(fā)的數字式內窺鏡膠囊攝像裝置內的所有電路;(2)體外便攜式部分:包括便攜式無線接收與數據傳輸裝置內的所有電路;(3)體外工作站部分即計算機控制與處理裝置:包括計算機與體外無線收發(fā)器和數據存儲電路板。下面分別針對這三部分的電路結構進行分析。

2 .1 體內部分硬件電路
膠囊內硬件電路是整個無線內窺鏡系統中最核心的部分,其功能是完成對內窺鏡彩色圖像的采集,并以無線方式把圖像傳出至體外,同時能接收來自體外的控制命令,并根據控制命令調整膠囊內硬件的工作狀態(tài)與工作參數。其關鍵技術是:采集反映消化道病變情況的高清晰度二維和三維內窺圖像、對采集圖像進行高效地無線傳輸、對電路進行低功耗設計以及系統能量管理等技術。膠囊內電路主要包括以下三部分。
2 .1 .1 圖像采集、處理與控制部分
這部分包括帶數字圖像輸出的CMOS 圖像傳感器、圖像壓縮模塊、MEMS 微電機、發(fā)白光與具有兩種不同紅外波長的LED( 采集三維深度圖像數據)等。
該部分電路不僅決定了內窺鏡圖像的質量,而且其低功耗設計也很關鍵。所以獲得符合醫(yī)學臨床要求的高質量內窺鏡圖像與低功耗設計是體內部分電路設計必須實現的。基于此,方案中硬件部分采用如下設計:
(1)圖像采集前端采用低功耗的帶數字彩色圖像輸出的CMOS 圖像傳感器, 且該圖像傳感器不帶任何圖像后處理功能,而是把這些處理放在體外的計算機中,大大降低了功耗;
(2)為了提供準確反映病變情況的圖像,系統采用光譜法形成三維深度圖像, 即使用兩種不同波長的LED和白光LED 作為照明光源獲得三維深度內窺圖像;
(3)CMOS 圖像傳感器的數字圖像輸出格式不采用RGB,而直接采用原始的彩色Bayer 格式,這樣在無損圖像壓縮模塊中能得到更好的壓縮比[5 ~6],以降低通信帶寬和無線收發(fā)器的總發(fā)射能量。采用這種方法即使不進行壓縮,按最大2 幀/ 秒的速率計算,通信的最大原始信號數據碼率為640×480×8×2=4 915 200 比特/ 秒,碼率只有采用RGB 格式的1/3;
(4)系統采用如圖3(b)所示的數字圖像處理流程。膠囊內只有壓縮和無線調制兩個模塊,比采用圖3(a)所示的一般數字圖像處理流程少了三個模塊,減小了膠囊內電路的面積和功耗;
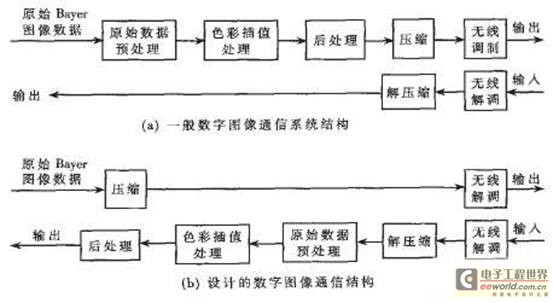
圖3 CMOS圖像傳感器/輸出數字圖像的處理流程圖
(5) 根據患者情況的不同可以控制CMOS 圖像傳感器在不同時期輸出不同尺寸的圖像、調整壓縮比以及幀率,以降低功耗和通信帶寬。
2 .1 .2 無線傳輸部分
該部分包括信道編碼、無線收發(fā)器、射頻功放和天線等。作為一個通信系統,它有三個主要的特點:(1)特短距離通信,因為體內膠囊與體外接收器僅隔一層人體組織( 包括肌肉、脂肪與皮膚),通信距離最遠為幾十個厘米;(2)通信信道的衰減非常大,因為人體組織對無線電波( 特別是UHF 以上波段的電磁波)有很大的吸收與反射作用[5];(3)通信主要是從體內到體外的大量的圖像數據傳輸,體外到體內則是根據臨床需要發(fā)送幾個字節(jié)的控制命令。從體積、功耗、天線、電路實現復雜度以及系統通信特點等幾方面綜合考慮,系統采用半雙工的通信方式,收發(fā)共用一根天線。作為一個通信系統,首先需確定的兩個重要參數是通信頻率和調制方式。采用ISM頻段中的2.4GHz 作為通信頻率。在無線調制方式上,系統從體內到體外發(fā)送采用FSK 調制方式,而體內接收體外的控制命令則采用OOK 方式。
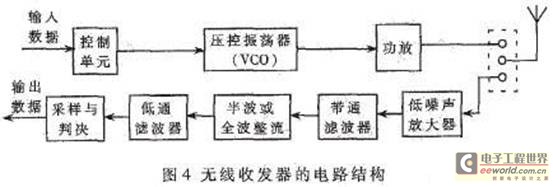
本方案中提出了一種無頻率綜合器的無線收發(fā)器的電路結構,如圖4 所示。這在電路設計的高層次階段保證了整個電路的低功耗。
天線部分則主要解決天線的微型化與效率之間的矛盾,因為天線必須能放在無線內窺膠囊(其尺寸為11mm×27mm)之內,且還需留給其它部分足夠的空間。系統天線的設計必須采用微天線的設計方法來增加天線的有效長度。
2 .1 .3 能量供給部分
該部分包括電池和能源管理電路[6], 它是整個體內部分硬件電路最關鍵的部分之一,因為體內部分的能源供給是保證實現全消化道檢查的必要條件。為延長電池壽命,系統主要采取以下三個措施:
(1)針對電路的高層次與低層次的低功耗設計;
(2)結合電池本身物理特性的系統動態(tài)能量管理策略,該方法大大延長了電池壽命;
(3)“ 基于通信”的能量管理策略,它是一種基于系統級通信結構調整各系統模塊工作的能量管理策略,在延長電池使用壽命方面大大優(yōu)于常規(guī)的能量管理策略。
2 .2 體外便攜式無線接收與數據傳輸裝置
體外的便攜式無線接收和數據傳輸裝置的功能主要是把天線接收陣列接收的內窺圖像數據分成兩路,一路送給膠囊定位模塊獲得膠囊的定位信息,另一路送入相連接的無線接收器,然后把定位信息和圖像一起存入便攜式存儲體上或轉發(fā)給計算機控制與處理裝置。主要涉及的關鍵技術為:(1)基于無線電定位技術,通過天線接收陣列接收信號的角度與強度來定位膠囊在人體內的位置;(2)高效天線陣列的設計技術;(3)低功耗電路設計技術;(4)具有高靈敏度的低功耗高速FSK 解調的無線接收機的ASIC 設計技術等。
2 .3 計算機控制與處理裝置
計算機控制與處理裝置主要包括無線發(fā)送卡、計算機、高清晰度監(jiān)視器以及相關的處理軟件。其關鍵技術主要包括:(1)高速無線收發(fā)器(OOK 調制、FSK 解調)的設計;(2)基于原始Bayer 彩色圖像數據的圖像處理技術;(3)三維深度圖像的重建技術等。
本文提出的無線內窺鏡系統方案是在綜合了以色列小腸膠囊內窺鏡的特點以及韓國在該領域研究成果的基礎上,提出的一個全新的數字化微型無線內窺鏡系統方案。該方案不僅提高了獲取圖像的質量,還提供實時觀察病人消化道圖像、全消化道檢查、二維與三維的內窺圖像數據采集等功能, 另外根據對患者病情的不同, 系統可提供三種不同的系統工作模式( 即診斷方式)。目前本系統中的數字電路模塊部分都已經通過FPGA 的驗證。