
為了實(shí)現(xiàn)在線測(cè)量回轉(zhuǎn)機(jī)械傳動(dòng)系統(tǒng)的轉(zhuǎn)動(dòng)慣量,采用了以ADuC812單片機(jī)為核心,并結(jié)合其他外圍芯片的控制電路和實(shí)現(xiàn)方法。硬件重點(diǎn)設(shè)計(jì)了單片機(jī)采集與處理信號(hào)電路及繼電器控制電路的實(shí)現(xiàn);軟件給出了主程序流程圖的設(shè)計(jì)。經(jīng)過硬件實(shí)測(cè),該電路可以方便快捷地完成對(duì)轉(zhuǎn)動(dòng)慣量的實(shí)時(shí)測(cè)量,且電路結(jié)構(gòu)簡(jiǎn)單,使用靈活方便,并具有線性度高,噪聲系數(shù)小等特點(diǎn)。
轉(zhuǎn)動(dòng)慣量是質(zhì)量特性參數(shù)測(cè)量的重要部分,在多個(gè)領(lǐng)域從產(chǎn)品的設(shè)計(jì)、生產(chǎn)和控制系統(tǒng)中都起著舉足輕重的作用,直接關(guān)系到產(chǎn)品設(shè)計(jì)成敗和產(chǎn)品的質(zhì)量。從航空工業(yè)對(duì)飛機(jī)轉(zhuǎn)動(dòng)慣量的測(cè)量到汽車工業(yè)對(duì)轉(zhuǎn)動(dòng)部件慣量的測(cè)量,無(wú)不體現(xiàn)著其測(cè)量的重要性。本文以實(shí)驗(yàn)室某回轉(zhuǎn)機(jī)械傳動(dòng)系統(tǒng)為研究模型,采用單片機(jī)作為核心控制器件,重點(diǎn)研究了轉(zhuǎn)動(dòng)慣量測(cè)量過程的硬件和軟件設(shè)計(jì)。
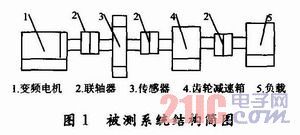
1 被測(cè)系統(tǒng)結(jié)構(gòu)簡(jiǎn)介
研究的回轉(zhuǎn)機(jī)械傳動(dòng)系統(tǒng)結(jié)構(gòu)如圖1所示。
試驗(yàn)設(shè)備清單如下所述:
變頻器一臺(tái):輸入規(guī)格為AC 3PH 380~460 V,50/60 Hz;輸出規(guī)格為AC0~240 V 1.7 kVA 4.5 A;
變頻范圍:2~200 Hz。
三相異步電機(jī):額定功率為0.55 kW;額定轉(zhuǎn)矩為3.5 N·m;同步轉(zhuǎn)速為1 500 r/min;輸入電壓為380 V。
轉(zhuǎn)矩傳感器:額定轉(zhuǎn)矩為10 N·m;
轉(zhuǎn)速傳感器:轉(zhuǎn)速范圍為0~6 000 r/min;
轉(zhuǎn)矩轉(zhuǎn)速測(cè)試卡:轉(zhuǎn)矩測(cè)試精度為±0.2%FS;轉(zhuǎn)速測(cè)試精度為±0.1%。
2 硬件設(shè)計(jì)
2.1 整體硬件結(jié)構(gòu)圖
硬件電路設(shè)計(jì)是該測(cè)量系統(tǒng)的核心部分,它不僅負(fù)責(zé)傳感器信號(hào)的采集、處理、傳輸?shù)热蝿?wù),而且負(fù)責(zé)接收上位機(jī)的控制命令,并將采集到的數(shù)據(jù)傳送給上位機(jī),從而使整個(gè)系統(tǒng)可靠、有序的工作。整個(gè)電路主要由傳感器信號(hào)采集電路、單片機(jī)控制電路、繼電器控制電路、通信接口電路及電源模塊組成。整體硬件電路設(shè)計(jì)框圖如圖2所示。

2.2 信號(hào)輸入/輸出電路
2.2.1 模擬量輸出調(diào)理電路
硬件電路中只有控制轉(zhuǎn)矩輸出為模擬量輸出信號(hào),由于ADuC812的D/A口輸出的電壓值為0~2.5 V,而變頻器接收的電壓值是0~10 V,所以需要經(jīng)過運(yùn)算放大器放大,在接人運(yùn)算放大器之前,先要接由運(yùn)放組成的DAC輸出緩沖器,緩沖器連接成跟隨器的形式,保證了輸出放大器的通帶和負(fù)載能力。電路連接如圖3所示。

2.2.2 扭矩傳感器信號(hào)采集電路
扭矩傳感器的輸出信號(hào)為1~5 V,如果直接傳輸至單片機(jī),則可能會(huì)由于傳輸距離過長(zhǎng)及試驗(yàn)中的電磁干擾影響到反饋信號(hào)的精度。所以為了增強(qiáng)抗干擾性,提高傳輸精度,采用4~20 mA的電流傳輸。它的傳輸電路如圖4所示。
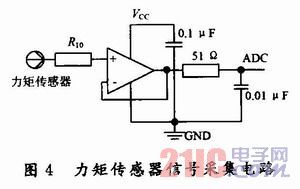
傳輸電路中將扭矩傳感器傳輸過來(lái)的4~20 mA電流信號(hào)通過Rio還原為0~2.5 V的電壓信號(hào),以供單片機(jī)采樣之用。轉(zhuǎn)換后的電壓信號(hào)還不能直接接入單片機(jī)的ADC口,需要先接入由運(yùn)放組成的緩沖器。為了實(shí)現(xiàn)阻抗匹配和濾除高頻干擾,運(yùn)放的輸出串接有51Ω電阻和0.01μF電容組成的低通濾波網(wǎng)絡(luò)。
2.3 繼電器控制電路
在實(shí)際工作中,電機(jī)可能有正轉(zhuǎn)、反轉(zhuǎn)等多種工作狀態(tài),電機(jī)的轉(zhuǎn)動(dòng)狀況需要通過測(cè)量電路實(shí)現(xiàn)。由于電機(jī)是強(qiáng)電設(shè)備,功率較大,這要求測(cè)量系統(tǒng)必須具有將輸出的低電壓、小電流信號(hào)轉(zhuǎn)換成為高電壓、大電流信號(hào)的裝置。在此選用電磁繼電器就能很好的滿足上述要求,電磁式繼電器一般由鐵芯、線圈、銜鐵、觸點(diǎn)簧片等組成的。電磁繼電器的驅(qū)動(dòng)電流一般很小,但它能帶負(fù)載的電流卻很大,只要在線圈兩端加上一定的電壓,線圈中就會(huì)流過一定的電流,從而產(chǎn)生電磁效應(yīng),銜鐵就會(huì)在電磁力吸引的作用下克服返回彈簧的拉力吸向鐵芯,從而帶動(dòng)銜鐵的動(dòng)觸點(diǎn)與靜觸點(diǎn)(常開觸點(diǎn))吸合。當(dāng)線圈斷電后,電磁的吸力也隨之消失,銜鐵就會(huì)在彈簧的反作用力返回原來(lái)的位置,使動(dòng)觸點(diǎn)與原來(lái)的靜觸點(diǎn)(常閉觸點(diǎn))吸合。這樣吸合、釋放,從而達(dá)到了在電路中導(dǎo)通、切斷的目的。

繼電器控制電路如圖5所示。電磁繼電器能夠很好的把測(cè)量電路和電機(jī)隔離開來(lái),不過繼電器在開關(guān)動(dòng)作時(shí),內(nèi)部會(huì)產(chǎn)生很高的感應(yīng)電動(dòng)勢(shì),因此它的回路要反接二極管來(lái)提供泄流回路來(lái)泄放關(guān)斷時(shí)線圈中的剩余電流,以保護(hù)三極管不被反電勢(shì)擊穿。
3 軟件設(shè)計(jì)
轉(zhuǎn)動(dòng)慣量測(cè)量系統(tǒng)是一種硬件與軟件相結(jié)合的技術(shù),軟件是控制系統(tǒng)的工具,為了增加軟件的可讀性,清楚的表達(dá)設(shè)計(jì)思路,應(yīng)盡量使程序模塊化。軟件部分主要包括角度檢測(cè)子程序、轉(zhuǎn)矩控制檢測(cè)子程序、系統(tǒng)通信發(fā)送子程序、PC機(jī)接收通信子程序、延時(shí)子程序、LCD驅(qū)動(dòng)程序、A/D轉(zhuǎn)換程序和數(shù)據(jù)處理和電磁閥控制程序等。軟件流程圖如圖6所示。

4 結(jié)語(yǔ)
本文設(shè)計(jì)的轉(zhuǎn)動(dòng)慣量測(cè)量系統(tǒng)以單片機(jī)為核心,并充分結(jié)合其他外圍芯片器件的功能,可以實(shí)現(xiàn)回轉(zhuǎn)機(jī)械傳動(dòng)系統(tǒng)轉(zhuǎn)動(dòng)慣量的自動(dòng)檢測(cè),有很好的可行性和較強(qiáng)的實(shí)用性。