
摘要:PWM脈寬信號調(diào)制是現(xiàn)代電子行業(yè)中使用較為廣泛的一種脈沖信號,其典型應(yīng)用就是舵機(jī)控制。以Proteus和Keil軟件為基礎(chǔ),介紹了在Proteus環(huán)境下利用51單片機(jī)產(chǎn)生多路PWM脈沖的實(shí)現(xiàn)方法。最后以一個典型的應(yīng)用實(shí)例驗(yàn)證了設(shè)計的可行性與可靠性。實(shí)驗(yàn)證明,本系統(tǒng)可在單片機(jī)定時器資源有限的情況下同時對多個舵機(jī)的輸出轉(zhuǎn)角進(jìn)行控制。
關(guān)鍵詞:PWM;舵機(jī)控制;Proteus;Keil;單片機(jī)
0 引言
單片機(jī)是現(xiàn)代儀器儀表、家用電器、工業(yè)儀器等領(lǐng)域應(yīng)用十分廣泛的可編程器件之一,有著價格低廉、編程靈活、體積小、可擴(kuò)展性強(qiáng)等優(yōu)點(diǎn)。單片機(jī)功能的飛速發(fā)展,其應(yīng)用范圍日益廣泛,小到玩具,大到機(jī)器人,無論從數(shù)據(jù)采集,過程控制,模糊控制等智能系統(tǒng),還是人類的日常生活,都離不開單片機(jī)。但是在單片機(jī)系統(tǒng)的開發(fā)過程中,如果先制作好電路板,再反復(fù)編程調(diào)試,就會給單片機(jī)系統(tǒng)開發(fā)帶來一定的麻煩。而如果設(shè)計初期就將Proteus軟件作為單片機(jī)系統(tǒng)的開發(fā)調(diào)試仿真工具,則可以很好的解決這個問題,在Proteus上仿真通過后再制作電路板,就可以大大縮短開發(fā)周期和研發(fā)成本。本文以一個典型的單片機(jī)應(yīng)用實(shí)例為基礎(chǔ),使用Proteus和Keil軟件作為開發(fā)工具,介紹了單片機(jī)系統(tǒng)初期開發(fā)的設(shè)計與仿真過程。
1 Proteus軟件簡介
Proteus軟件是英國Labcenter Electronics公司開發(fā)的EDA工具軟件,已有近20年的歷史,在全球得到了廣泛的應(yīng)用。Proteus軟件功能強(qiáng)大,它集電路設(shè)計、制版及仿真等多功能于一身,不僅能夠?qū)﹄姽ぁ㈦娮蛹夹g(shù)學(xué)科涉及的電路進(jìn)行設(shè)計與分析,還能夠?qū)ξ⑻幚砥鬟M(jìn)行設(shè)計和仿真,并且功能齊全,界面多彩,是近年來備受電子設(shè)計愛好者青睞的一款新型電子線路設(shè)計與仿真軟件。它的電路仿真功能可以和Multisim相媲美,而獨(dú)特的單片機(jī)仿真功能是Multisim以及其他任何仿真軟件都不具備的,同時,它的PCB電路制版功能可以和Protel相媲美。此外,它的功能不但強(qiáng)大,而且各種功能都毫不遜于同類軟件,是廣大電子設(shè)計愛好者難得的一個工具軟件。Proteus目前支持的單片機(jī)類型有:6800系列、8051系列、AVR系列、PIC12系列、PIC16系列、PIC18系列、Z80系列、HC11系列以及各種外圍芯片。同時還可以支持第三方的軟件編譯和調(diào)試環(huán)境(如Keil等軟件)。
2 舵機(jī)及其工作原理
2.1 舵機(jī)簡介
舵機(jī)英文稱Servo,也稱伺服機(jī),其特點(diǎn)是結(jié)構(gòu)緊湊、易于安裝調(diào)試、控制簡單、大扭力、成本較低等。舵機(jī)是一種位置伺服的驅(qū)動器,主要用于各種飛行器的執(zhí)行機(jī)構(gòu)。其工作原理是:控制信號由接收機(jī)的通道進(jìn)入信號調(diào)試芯片,從而獲得直流偏置電壓。它內(nèi)部有一個基準(zhǔn)電路,可以產(chǎn)生周期為20 ms、寬度為1.5 ms的基準(zhǔn)信號,如果將獲得的直流偏置電壓與電位器的電壓相比較,即可獲得電壓差輸出。最后,電壓差的正負(fù)信號輸出到電機(jī)驅(qū)動芯片,即可決定電機(jī)的正反轉(zhuǎn)。當(dāng)電機(jī)轉(zhuǎn)速一定時,通過級聯(lián)減速齒輪帶動電位器旋轉(zhuǎn),以使得電壓差為0,電機(jī)停止轉(zhuǎn)動。舵機(jī)可以通過連桿將轉(zhuǎn)動轉(zhuǎn)化為位移,再控制槳葉、油門、舵面等機(jī)構(gòu)的動作,從而達(dá)到改變被控物體姿態(tài)的作用。圖1所示為某型號舵機(jī)的實(shí)物圖。

實(shí)際應(yīng)用中,很多時候往往需要同時使用多個舵機(jī)才能達(dá)到控制的目的,例如固定翼的模型飛機(jī)至少需要3個舵機(jī)才能保證其空中姿態(tài)的穩(wěn)定,而機(jī)器人則需要更多舵機(jī)來完成其機(jī)械動作和功能。雖然利用FPGA可以輸出多路PWM波形,但是,F(xiàn)PGA管腳多,不易焊接,成本較高,性價比不高。而利用單片機(jī)定時器輸出PWM信號來控制舵機(jī)是個很好的方法,但是,單片機(jī)的定時器資源有限,這就需要通過一定的編程技巧,用一個定時器來實(shí)現(xiàn)多路PWM脈沖的輸出,從而一次性控制多個舵機(jī)動作,以達(dá)到節(jié)省單片機(jī)資源之目的。
2.2 舵機(jī)工作原理
標(biāo)準(zhǔn)的舵機(jī)有三條線,分別是電源線、地線和控制信號線。其中控制信號線需要輸入PWM信號,以便利用占空比來控制舵機(jī)的位置。本文的PWM信號是一種周期為20 ms的脈寬調(diào)制信號,而舵機(jī)信號線的輸入脈沖寬度為0.5~2.5ms的PWM信號時,其輸出轉(zhuǎn)角可在0°~180°間變化,輸出轉(zhuǎn)角和脈沖寬度的關(guān)系可簡單的表示為:
α=90(t-0.5)
式中,α為舵機(jī)輸出轉(zhuǎn)角;t為脈沖寬度,其定義域?yàn)?.5≤t≤2.5。由此可以看出,舵機(jī)的輸出轉(zhuǎn)角和脈沖寬度是一種線性關(guān)系。
3 系統(tǒng)設(shè)計
3.1 硬件電路設(shè)計
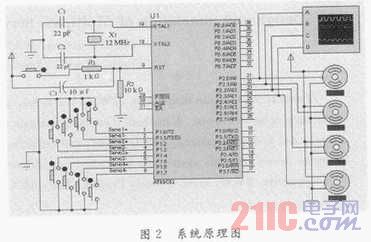
本系統(tǒng)電路可以基于單片機(jī)的最小系統(tǒng)設(shè)計,單片機(jī)最小系統(tǒng)通常包括電源、晶振和復(fù)位電路。系統(tǒng)要實(shí)現(xiàn)對舵機(jī)輸出轉(zhuǎn)角的控制,必須首先產(chǎn)生基本的PWM周期信號,即產(chǎn)生20 ms的周期信號,其次要調(diào)整脈寬,即調(diào)節(jié)單片機(jī)輸出PWM信號的占空比。單片機(jī)能使PWM信號的脈沖寬度實(shí)現(xiàn)微秒級的變化,因而具有較高的控制精度,單片機(jī)可以通過控制算法將計算結(jié)果轉(zhuǎn)化為PWM信號輸出到舵機(jī)信號線上。但由于單片機(jī)系統(tǒng)是數(shù)字系統(tǒng),其工作方式由程序決定,而控制信號的變化完全依靠硬件計數(shù),所以受外界干擾小,系統(tǒng)可靠程度高。
在用單片機(jī)驅(qū)動舵機(jī)之前,要先確定舵機(jī)的功率,然后選擇足夠功率的電源為舵機(jī)供電,而舵機(jī)信號控制端則只需要直接接在單片機(jī)I/O口上即可。一個多路舵機(jī)電路的設(shè)計圖如圖2所示。
3.2 軟件設(shè)計
本系統(tǒng)使用的是單片機(jī)的定時器方式2,方式2又被稱為8位初值自動重裝定時器/計數(shù)器,THX被作為常數(shù)緩沖器,當(dāng)TLX計數(shù)溢出時,在溢出標(biāo)志TFX置1的同時,還會自動將THX中的常數(shù)重新裝入TLX中,使TLX從初值開始重新計數(shù),這樣就避免了人為軟件重裝初值所帶來的時間誤差,從而提高了定時器的計數(shù)精度,因此,方式2特別適合用做對精度要求較高的脈沖信號發(fā)生器的設(shè)計。因?yàn)槠溆嫈?shù)器只有8位,故最多能裝載的計數(shù)個數(shù)為28=256個,在12 MHz的晶振頻率下,單次最多可計時256μs。系統(tǒng)軟件可以基于Keil編寫,proteus可直接調(diào)用Keil編譯生成的.HEX(16進(jìn)制)文件進(jìn)行仿真,當(dāng)Keil程序修改重新編譯后,Proteus不用做任何改動,直接運(yùn)行便可看到修改后的程序運(yùn)行效果。
現(xiàn)以四路舵機(jī)控制為例來定義五個變量count,servo1,servo2,servo3,servo4。變量count用于對中斷計數(shù),servo1~4用于存儲四個PWM信號的脈寬值,程序中使用0.05 ms的定時器周期,定時器每0.05 ms產(chǎn)生一次中斷,同時變量count加1,當(dāng)count加到400時,表示20 ms時間到,count歸零重新計數(shù),在每一次重新計數(shù)開始時,單片機(jī)的所有舵機(jī)控制I/O口置高,當(dāng)count加到等于servo1時,控制舵機(jī)1的I/O口置低,這樣就會產(chǎn)生一個周期為20 ms,脈沖寬度等于servo1×0.05 ms的PWM脈沖,其他三路與之類似。servo1~4的值可通過按鍵輸入改變,因定時器周期為0.05 ms,故PWM可控脈寬步進(jìn)值為0.05 ms,對應(yīng)被控舵機(jī)的輸出角度步進(jìn)4.5°。如果需要更小的步進(jìn)值,只需改變定時器周期和幾個變量的值即可,如果需要更多路的PWM波輸出,也僅需相應(yīng)增加幾個變量即可;如果需要更多按鍵來控制舵機(jī)輸出轉(zhuǎn)角,最好將按鍵接稱陣列式,這樣比較節(jié)省I/O口。經(jīng)計算,當(dāng)需要0.05 ms的計數(shù)周期時,應(yīng)將THX和TLX都寫入0xCE。設(shè)4個舵機(jī)的信號端口分別為IO1~I(xiàn)O4,其中斷程序流程圖如圖3所示。
系統(tǒng)中的主程序包含定時器的設(shè)置與使能、按鍵檢測、變量賦值等,在此不再贅述。
4 系統(tǒng)仿真
在Proteus中繪制好電路,同時設(shè)置好相關(guān)參數(shù),然后運(yùn)行程序,即可直觀地看到程序執(zhí)行結(jié)果,通過按鍵還可改變舵機(jī)的輸出角度。舵機(jī)輸出角度執(zhí)行結(jié)果如圖4所示。
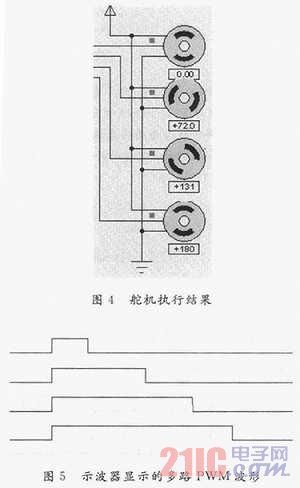
通過系統(tǒng)中連接的示波器可以顯示多路PWM波輸出結(jié)果。其PWM波形如圖5所示,圖中的方格橫向每格代表0.2 ms,縱向每格代表5 V。從示波器仿真結(jié)果來看,輸出的四路PWM波與四個舵機(jī)輸出轉(zhuǎn)角相對應(yīng),其波形都非常好。
5 結(jié)語
本文通過在Proteus中對電路的設(shè)計和Keil中對軟件的編寫,用51單片機(jī)實(shí)現(xiàn)了多路PWM脈沖的輸出,該系統(tǒng)具有硬件電路簡單、軟件可靠、資源節(jié)省等特點(diǎn)。可用于航模、機(jī)器人等設(shè)計制作過程中的舵機(jī)控制和輔助系統(tǒng)調(diào)試,也可以用于其他需要多路PWM脈沖的系統(tǒng)。