
電動機是現(xiàn)代工農(nóng)業(yè)生產(chǎn)的主要動力,而異步電動機由于結構簡單、成本低、機械性能滿足大多數(shù)生產(chǎn)機械的要求,因此應用范圍更加廣泛。但異步電動機經(jīng)常在高溫、高濕、多塵埃的環(huán)境中工作,容易發(fā)生堵轉、短路、斷相等故障,因此,設計設計性能優(yōu)越的保護裝置,對于電動機的安全使用具有很重要的意義。
目前,異步電動機保護主要采取熱繼電器型的過流保護,這種保護靈敏度低,切除故障時間長,往往在保護動作后電動機已經(jīng)損壞。隨著單片機技術、通信技術的發(fā)展,以及智能化電動機保護技術研究的深入,促使電動機保護器朝著通信網(wǎng)絡化、保護裝置微機化、保護功能集成化等方面發(fā)展。
2 電動機常見故障分析以及保護措施
電動機故障按對稱與否分為對稱故障和不對稱故障兩種。對稱故障有過載、堵轉、三相短路等,這類故障對電動機的影響主要是電流增大而引起熱效應;不對稱故障又分為接地和不接地兩類,非接地故障包括斷相、逆相、相間短路,接地故障包括單相接地和二相接地。對稱分量法是分析電動機不對稱分量的常用方法。一組不對稱的三分量可以分解為正序、負序、和零序三組對稱的三分量,各序分量各自單獨存在。電動機發(fā)生不對稱故障時,將不對稱三相電壓和不對稱三相電流分別用它們的三相分量代替,從而相應地形成正序、負序和零序三個等值網(wǎng)絡,然后進行故障分析。假設己知不對稱三相電流為IA,IB,IC ,電流的正序、負序和零序分量各為A1 A2 A0 I ,I ,I (以A 相為例),根據(jù)對稱分量法,有式(1)或者式(2)所示的關系(因對稱關系,相序量只寫出A 相)。
對于電動機的不對稱故障問題,如斷相、相間短路、單相接地、兩相接地短路等,借助于對稱分量法分析比較簡單,即任意一組不對稱正弦量分解為三個平衡分量(正序分量/負序分量和零序分量),然后把各個分量對電動機所產(chǎn)生的影響分別計算,再把所得的結果疊加。

發(fā)生不對稱故障時,電動機電流可分解為正序、負序和零序分量。當電動機三相對稱時,負序和零序電流為零,而發(fā)生不對稱故障時則會顯著增加,因此在檢測電動機過流程度的同時,以序分量為基礎,檢測負序和零序電流的大小。這樣不但能更好地反應電動機的運行狀況,還可以大大提高保護動作的靈敏度和可靠性。
3 CAN 總線簡介以及節(jié)點組成
控制局域網(wǎng)絡 CAN 是一種串行通信協(xié)議,能有效地支持具有很高安全等級的分布式實時控制。它由物理層和數(shù)據(jù)鏈路層兩部分組成,而數(shù)據(jù)鏈路層又包括邏輯鏈路控制子層和介質訪問控制子層。CAN 總線的應用范圍很廣,從高速的局域網(wǎng)絡到低價位的多路配線都可以使用CAN 總線。CAN 總線型結構是一種適合工業(yè)現(xiàn)場自動控制的計算機局域網(wǎng)絡。在網(wǎng)絡的層次結構中,數(shù)據(jù)鏈路層和物理層是保證通信質量不可缺少的部分,CAN 控制器就用來完成這個任務,對外CAN 控制器提供了與微處理器的物理線路的接口,通過對它的編程,CPU 可以設置不同的工作方式,控制它的工作狀態(tài),進行數(shù)據(jù)的發(fā)送和接收,并把應用層建立在它的基礎之上。CAN 總線高速發(fā)送接收器,又稱總線驅動器,提供了CAN控制器與物理總線之間的接口,以及對CAN 總線的差動發(fā)送和接收功能。
4 硬件設計
該保護器的硬件電路主要有四部分:保護單元、通信單元、人機接口單元和主監(jiān)控通信單元。硬件設計原理圖如圖1 所示:
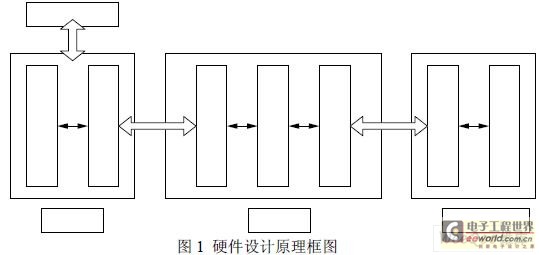
保護單元由數(shù)據(jù)采集與轉換模塊和與控制微處理器組成。前者包括電壓互感器、電流互感器(采用三相電壓和各個電流信號)、低通濾波電路、電壓偏置電路和電壓跟隨器等電路,本單元可以實現(xiàn)模數(shù)轉換、報警、顯示以及設置等功能。
通信單元是由一塊雙RAM 芯片負責保護單元與通信單元之間的數(shù)據(jù)連通。微處理器P87C52X2 將通信單元的核心,一方面保證與保護單元的數(shù)據(jù)通訊,另一方面負責處理與CAN 總線的通信。CAN 控制器采用SJA1000,CAN 驅動器采用TJA1050,這兩個器件負責完成保護單元與CAN 總線的物理連接和數(shù)據(jù)傳送工作。
主監(jiān)控單元是電動機智能保護系統(tǒng)的核心,它接收來自現(xiàn)場保護控制單元傳來的電動機狀態(tài)和控制信息,同時根據(jù)需要向現(xiàn)場控制單元發(fā)出指令。它由一塊RS232-CAN 適配器和上位機PC 組成,RS232-CAN 適配器是基于串行通信協(xié)議的適配器,負責上位機與CAN總線的通信。人機接口單元通過串行接口與保護單元連接,它包括看門狗模塊、定時時鐘模塊、鍵盤輸入模塊、液晶顯示模塊、指示燈與復位按鈕等。
5 算法介紹及軟件設計
在算法上,要綜合考慮計算精度和計算速度。根據(jù)研究情況和經(jīng)驗,本文采用周期函數(shù)的傅立葉算法。傅立葉算法用于提取基波分量或者提取某次諧波分量(例如二次諧波、三次諧波)非常方便。當采樣頻率為300hz 時,傅立葉算法的計算也很方便,用匯編語言編程也容易實現(xiàn)。另外,全波傅立葉算法所用的數(shù)據(jù)窗為一個周期;如果要提高微機保護的動作速度,也可以采用半波傅立葉算法。
主程序主要是用來實現(xiàn)通信協(xié)議中的各項功能。微處理器通過外部中斷來響應CAN 總線通信。鍵盤顯示掃描的周期為1ms.并在主程序循環(huán)中不斷的查詢各類標志,如查詢到某個標志置位則轉入相應的程序處理。主程序流程圖如圖2 所示:

將CAN 總線技術引入到電動機的保護中,就是為了讓其組成網(wǎng)絡,實現(xiàn)主監(jiān)控單元對各個分散的保護單元的在線實時監(jiān)控,因此保護節(jié)點通信設計就關系到整個保護系統(tǒng)的可靠性和實用性。通信程序由三部分組成,分別是CAN 節(jié)點初始化程序,報文接收程序,報文發(fā)送程序。
SJA1000 的初始化只有在復位模式下才能進行,初始化主要包括工作方式的設置、接受濾波方式的設置、接受屏蔽寄存器和接受代碼寄存器的設置、波特率參數(shù)的設置和中斷允許寄存器的設置等等。在完成SJA1000 的初始化設置后,SJA1000 就可以回到工作狀態(tài),進行通信任務。初始化流程圖如上圖3 所示。
發(fā)送子程序負責節(jié)點報文的發(fā)送。發(fā)送時只需要將待發(fā)送的數(shù)據(jù)按待定格式組合成一幀報文,送入SJA1000 發(fā)送緩存區(qū)中,并置位命令寄存器中的發(fā)送請求位標志,然后啟動SJA1000 發(fā)送即可。發(fā)送子程序報文發(fā)送分數(shù)據(jù)幀和遠程幀兩種。遠程幀無數(shù)據(jù)場。報文發(fā)送有兩種模式,即中斷和查詢。考慮到通信實時性的要求,本文采用中斷模式。發(fā)送子程序流程圖如圖4 所示。
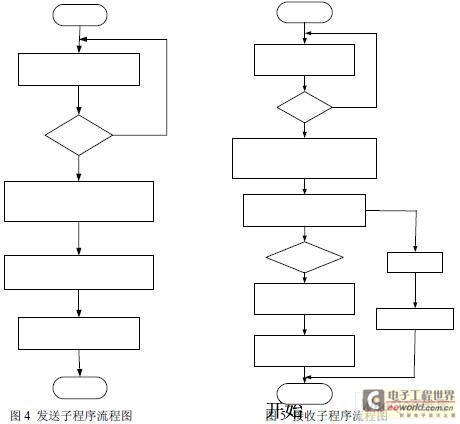
接收子程序負責節(jié)點報文的接收,并且要對諸如總線關閉、錯誤報警、接收溢出等情況進行處理。和發(fā)送子程序一樣,也有中斷和查詢兩種方式,本文采用中斷方式。接收子程序流程圖如圖5 所示。
6 創(chuàng)新點及結束語
本文提出將 CAN 總線技術應用到電動機保護中,使其組成網(wǎng)絡,實現(xiàn)了智能保護各節(jié)點之間、節(jié)點與上位機之間的通訊。本設計對于電動機的各種故障有良好的保護效果,在實驗室環(huán)境下仿真結果良好,在某鋼鐵廠生產(chǎn)車間的實際應用中也取得了令人滿意的效果,達到預期目標。