
引言
軌道運(yùn)輸系統(tǒng)是礦井運(yùn)輸?shù)闹饕ぞ咧唬诘V井運(yùn)輸中扮演著重要的角色。如何安全、可靠地實(shí)現(xiàn)對(duì)礦井軌道運(yùn)輸系統(tǒng)的監(jiān)測(cè),對(duì)于保障礦井安全生產(chǎn)具有重要意義。目前的礦井軌道運(yùn)輸監(jiān)測(cè)大多采用軌道電路和壓力傳感器等。因此,現(xiàn)有礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)有以下不足之處:
(1) 使用接觸式傳感器,存在機(jī)械磨損和磨擦產(chǎn)生電火花的可能性,影響安全生產(chǎn);
(2) 監(jiān)測(cè)不具可視化,監(jiān)控者只能看到一些數(shù)字化的指標(biāo),監(jiān)測(cè)效果差;
(3) 傳感器設(shè)置在軌道下面,井下巷道積水、環(huán)境惡劣,嚴(yán)重影響傳感器性能;
(4) 系統(tǒng)成本高、維護(hù)量大、可靠性差。
為了有效地解決以上幾個(gè)方面問題,本文提出采用非接觸式的視頻圖象處理方法來實(shí)現(xiàn)礦井軌道運(yùn)輸監(jiān)測(cè)¬¬¬¬。由于紅外波段具有空間分辨率高、穿透性好和散射光小等優(yōu)點(diǎn)[1],因此,礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)使用了紅外CCD。
1 紅外CCD礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)
采用基于ADSL(Asymmetric Digital Subscriber Line,非對(duì)稱數(shù)字用戶環(huán)路)雙絞線寬帶傳輸技術(shù)[2]的紅外CCD礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)如圖1所示。來自紅外CCD攝像機(jī)的視頻信號(hào),經(jīng)模式識(shí)別、最優(yōu)閾值等視頻圖象算法處理后,分別提取視頻圖象中有關(guān)列車圖象、有效載荷(是指列車所運(yùn)輸?shù)呢浳铮纾旱V石、煤炭等)圖象的各種特征量,將監(jiān)測(cè)得到的計(jì)算結(jié)果通過ADSL MODEM傳輸給監(jiān)控中心的計(jì)算機(jī),監(jiān)控中心的PC機(jī)會(huì)將有關(guān)列車運(yùn)輸狀態(tài)的分析結(jié)果顯示出來,從而實(shí)現(xiàn)非接觸的、可視化的遠(yuǎn)程監(jiān)控與測(cè)量。為最大限度地減少傳送的數(shù)據(jù)量,在滿足實(shí)際監(jiān)測(cè)需要的前提下,本系統(tǒng)采用256級(jí)灰度圖象,圖象尺寸為320×240象素。
圖1 紅外CCD礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)
紅外CCD礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)具有列車運(yùn)動(dòng)速度計(jì)算、列車移動(dòng)方向識(shí)別、列車節(jié)數(shù)計(jì)數(shù)、列車有效載荷計(jì)算、列車運(yùn)行異常情況報(bào)警處理(包括列車停運(yùn)告警、列車超速告警)、系統(tǒng)初始化與常用參數(shù)的設(shè)置保存六個(gè)主要功能[3]。
2 礦井軌道運(yùn)輸監(jiān)測(cè)
2.1 列車運(yùn)動(dòng)速度計(jì)算
用圖象處理的方法來測(cè)量、計(jì)算列車的運(yùn)動(dòng)速度是一個(gè)復(fù)雜的問題。為此,本系統(tǒng)根據(jù)視頻圖象采集系統(tǒng)采集到的連續(xù)圖象[4],按照模式識(shí)別的原理對(duì)列車的基本特征進(jìn)行了分析。首先確定列車是否已經(jīng)到達(dá)監(jiān)測(cè)點(diǎn),如果列車已經(jīng)到達(dá)監(jiān)測(cè)點(diǎn),則比較相鄰運(yùn)動(dòng)幀圖象中列車狀態(tài)與位置的變化量,然后根據(jù)這個(gè)位置變化量、產(chǎn)生變化量所需的時(shí)間、紅外CCD視場(chǎng)(角度)、CCD采樣策略以及采樣策略對(duì)應(yīng)的采樣區(qū)域大小和紅外CCD鏡頭距列車的垂直距離這六個(gè)量的相互關(guān)系計(jì)算出列車的運(yùn)行速度。具體算法與相應(yīng)計(jì)算步驟如下。
2.1.1 檢測(cè)列車的時(shí)間戳及其位置
首先根據(jù)列車圖象的俯視特征和模式識(shí)別的基本原理,檢測(cè)出列車進(jìn)入監(jiān)測(cè)畫面的時(shí)間戳和它在圖象中的具體位置。
井下運(yùn)動(dòng)物體種類少,為井下移動(dòng)物體的快速識(shí)別提供了便利。另外,井下列車圖象的俯視特征為較規(guī)則的矩形,所以,快速識(shí)別是完全可以實(shí)現(xiàn)的。
在人工智能領(lǐng)域中,計(jì)算機(jī)視覺主要關(guān)注圖象處理算法,圖象處理方法很多,效果千差萬別。本文選擇了統(tǒng)計(jì)模式識(shí)別方法作為算法的理論依據(jù),這不僅僅因?yàn)樗菓?yīng)用最廣的方法,更重要的是因?yàn)楸鞠到y(tǒng)的設(shè)計(jì)目標(biāo)及要識(shí)別的物體特征非常適合使用統(tǒng)計(jì)模式識(shí)別進(jìn)行處理。
2.1.2 列車運(yùn)行速度檢測(cè)
關(guān)于列車運(yùn)行速度檢測(cè)問題,本文采用檢測(cè)相鄰運(yùn)動(dòng)幀,并計(jì)算相鄰運(yùn)動(dòng)幀間的位置變化與時(shí)間的關(guān)系來得到列車運(yùn)動(dòng)的速度。
(1)依據(jù)差分幀運(yùn)動(dòng)檢測(cè)方法,可以得到列車進(jìn)入監(jiān)測(cè)現(xiàn)場(chǎng)的首幀運(yùn)動(dòng)圖象;(2)利用運(yùn)動(dòng)檢測(cè)原理,檢測(cè)出列車進(jìn)入畫面的第二運(yùn)動(dòng)幀,將第二運(yùn)動(dòng)幀在圖象中的位置和進(jìn)入畫面的時(shí)間戳等參數(shù)通過ADSL發(fā)送到井上的監(jiān)控PC機(jī)上;(3)井上監(jiān)控PC機(jī)根據(jù)(1)和(2)兩項(xiàng)的相關(guān)參數(shù),計(jì)算出被監(jiān)控列車進(jìn)入監(jiān)控畫面的前兩個(gè)相鄰運(yùn)動(dòng)幀的差幀P;(4)根據(jù)得到的差幀P,計(jì)算出列車在第二運(yùn)動(dòng)幀相對(duì)于列車在第一運(yùn)動(dòng)幀移動(dòng)的長(zhǎng)度,即移動(dòng)象素的個(gè)數(shù)ΔP;(5)可以按式(1)計(jì)算出監(jiān)測(cè)系統(tǒng)獲取的每幀圖象對(duì)應(yīng)列車運(yùn)動(dòng)方向的視場(chǎng)總長(zhǎng)度L(單位為米);(6)根據(jù)列車進(jìn)入畫面的第一、第二運(yùn)動(dòng)幀對(duì)應(yīng)的時(shí)間戳,計(jì)算列車的運(yùn)行速度V(米/秒)。
2.1.3 系統(tǒng)的約束條件
根據(jù)各種參數(shù)及相互關(guān)系可知,在列車運(yùn)動(dòng)方向紅外監(jiān)測(cè)系統(tǒng)獲取的每幀圖象的視場(chǎng)總長(zhǎng)度L=2×[d×tan(α/2)],如果選擇的CCD鏡頭的視場(chǎng)角為80°,鏡頭布置位置距離被監(jiān)測(cè)列車上表面是1到1.5米,那么,紅外監(jiān)測(cè)系統(tǒng)在PAL制信號(hào)[5]條件下(每秒25幀視頻圖象)能夠不失真地監(jiān)測(cè)到列車的最高時(shí)速是多少呢?
根據(jù)“采樣定理[6]”,如果監(jiān)測(cè)系統(tǒng)的采樣頻率fs = 25Hz(PAL制),分別考慮CCD鏡頭布置位置距離被監(jiān)測(cè)列車上表面1米和1.5米兩種情況。
(1) CCD鏡頭位置距離被監(jiān)測(cè)列車1米
根據(jù)這些參數(shù)和基本假設(shè),可以按照公式(3)計(jì)算出每幀圖象對(duì)應(yīng)列車運(yùn)動(dòng)方向的視場(chǎng)總長(zhǎng)度:
L = 2×[d×tan(α/2)] = 2×[1×tan(80°/2)] = 2×0.8391 = 1.6782 米
根據(jù)“采樣定理”知,采樣頻率fs必須大于被測(cè)信號(hào)最高頻率的兩倍,采樣后的信號(hào)才不會(huì)出現(xiàn)混疊現(xiàn)象,即fs ≥ 2fc。
如果按照fc = fs/2計(jì)算,fc = 12.5Hz,在此情況下,相應(yīng)地能夠允許列車的最高運(yùn)行時(shí)速為Vmax = 20.98(米/秒),即允許被監(jiān)測(cè)列車最高以每小時(shí)75.5公里的時(shí)速通過監(jiān)測(cè)地點(diǎn),而目前礦井列車的最高設(shè)計(jì)時(shí)速僅為10米/秒(相當(dāng)于每小時(shí)36公里),一般正常情況下,列車在井下的運(yùn)動(dòng)速度通常為3米/秒到5米/秒。因此,本監(jiān)測(cè)系統(tǒng)完全可以滿足監(jiān)測(cè)需要。
(2) 要滿足10米/秒的最高設(shè)計(jì)時(shí)速,CCD鏡頭布置位置距離被監(jiān)測(cè)列車上表面最短距離
d = L/(2×0.8391) = 0.8/(2×0.8391) = 0.4767米
也就是說,如果監(jiān)測(cè)系統(tǒng)的CCD鏡頭距離被監(jiān)測(cè)列車上表面大于0.5米,就可以對(duì)礦井列車進(jìn)行有效監(jiān)測(cè)。
同樣,如果適當(dāng)加大鏡頭與被監(jiān)測(cè)物體的間距,就可以對(duì)運(yùn)行速度更高的物體進(jìn)行監(jiān)測(cè),照此看來,本系統(tǒng)的應(yīng)用范圍更廣。
2.2 列車移動(dòng)方向識(shí)別
首先,約定兩個(gè)基本概念:列車的上行方向和列車的下行方向。列車的上行方向:列車從采區(qū)運(yùn)輸產(chǎn)品到井上方向定義為列車的上行方向;列車的下行方向:列車從井上到采區(qū)方向定義為列車的下行方向。具體實(shí)現(xiàn)方法如下:
(1)首先根據(jù)列車圖象的俯視特征和模式識(shí)別的基本原理,檢測(cè)出“運(yùn)動(dòng)物體”是否進(jìn)入監(jiān)測(cè)畫面以及在圖象中的具體位置;
(2)根據(jù)CCD攝像機(jī)俯視列車得到的列車圖象具有“矩形特征”這一特點(diǎn),區(qū)分并識(shí)別出進(jìn)入監(jiān)測(cè)現(xiàn)場(chǎng)的運(yùn)動(dòng)物體是否是列車;
(3)根據(jù)事先約定的列車上行方向、列車下行方向以及CCD鏡頭的布置位置,連續(xù)跟蹤列車進(jìn)入監(jiān)測(cè)畫面的第一運(yùn)動(dòng)幀、第二運(yùn)動(dòng)幀和第三運(yùn)動(dòng)幀,以第二運(yùn)動(dòng)幀、第一運(yùn)動(dòng)幀以及它們的差幀來初步確定列車的運(yùn)行方向,再以第三運(yùn)動(dòng)幀、第二運(yùn)動(dòng)幀以及它們的差幀來驗(yàn)證前面確定的初步運(yùn)行方向是否正確。
2.3 列車運(yùn)行異常告警處理
2.3.1 列車進(jìn)入監(jiān)測(cè)現(xiàn)場(chǎng)后停止運(yùn)行
由于井下條件特殊,一旦運(yùn)行中的列車由于機(jī)械或電力等原因造成列車停止運(yùn)行,監(jiān)測(cè)系統(tǒng)應(yīng)該立即向井上控制中心告警,并進(jìn)行閉鎖。因?yàn)槊簜}容量有限,如果列車運(yùn)輸系統(tǒng)一旦停運(yùn),輕者會(huì)造成相關(guān)采區(qū)停工和煤倉事故,重者會(huì)造成機(jī)車追尾或相撞事故。因此,監(jiān)測(cè)系統(tǒng)必須迅速告警,以便采取必要的措施保障運(yùn)輸安全。告警處理如下:
監(jiān)測(cè)系統(tǒng)將在列車進(jìn)入監(jiān)測(cè)畫面后,連續(xù)采集視頻圖象,不斷比較得到的各幀圖象之間的差異,運(yùn)用幀間閾值法判斷列車的運(yùn)行狀態(tài),一旦發(fā)現(xiàn)列車停止運(yùn)行(連續(xù)若干幀圖象完全一致或幀間差值小于給定閾值),井下監(jiān)測(cè)系統(tǒng)將立即向井上監(jiān)控中心發(fā)送列車停止運(yùn)行標(biāo)志位和時(shí)間戳,井上PC機(jī)收到停止標(biāo)志和時(shí)間戳后,便進(jìn)行系統(tǒng)閉鎖、聲光告警和監(jiān)控日志記錄。
監(jiān)測(cè)系統(tǒng)隨后進(jìn)入停止模式的監(jiān)測(cè)狀態(tài),直到列車恢復(fù)正常運(yùn)行為止。監(jiān)測(cè)系統(tǒng)將在列車恢復(fù)運(yùn)行后,發(fā)送列車運(yùn)行狀態(tài)標(biāo)志位和相應(yīng)的時(shí)間戳,以便井上PC機(jī)解除系統(tǒng)閉鎖,完成告警解除和監(jiān)控日志的完整記錄。這些日志記錄可以為日后的事故分析、判斷和處理提供相應(yīng)依據(jù)。
2.3.2 超速告警
監(jiān)測(cè)系統(tǒng)中超速告警功能的實(shí)現(xiàn),一改過去井下列車駕駛員違規(guī)操作無法定量監(jiān)測(cè)的局面。對(duì)列車運(yùn)輸系統(tǒng)的安全運(yùn)行、列車運(yùn)輸系統(tǒng)事故責(zé)任的鑒別和區(qū)分均具有重要意義。實(shí)現(xiàn)超速告警處理的具體步驟如下:
(1)首先根據(jù)每個(gè)礦井軌道運(yùn)輸?shù)男枰蛙壍澜煌ㄇ闆r,在井上PC機(jī)上設(shè)定超速告警的速度閾值,這一閾值可以根據(jù)實(shí)際需要即時(shí)改變,因此,超速告警具有很大的靈活性。
(2)監(jiān)測(cè)系統(tǒng)在發(fā)現(xiàn)列車進(jìn)入監(jiān)測(cè)現(xiàn)場(chǎng)后,即對(duì)其行駛速度進(jìn)行計(jì)算,并將監(jiān)測(cè)系統(tǒng)得到的列車速度結(jié)果通過ADSL傳輸?shù)骄螾C機(jī)上。
(3)井上PC機(jī)將收到的列車時(shí)速與設(shè)定的超速告警閾值進(jìn)行比較,如果發(fā)現(xiàn)運(yùn)行中的列車時(shí)速超過告警限制,則進(jìn)行聲光告警,提示管理人員采取相應(yīng)措施,并且自動(dòng)進(jìn)行安全日志的超速告警記錄(主要包括:列車的運(yùn)行時(shí)速、時(shí)間戳等信息)。
3 現(xiàn)場(chǎng)實(shí)驗(yàn)與分析
根據(jù)前面討論的礦井軌道運(yùn)輸監(jiān)測(cè)需求,本系統(tǒng)在平頂山礦業(yè)集團(tuán)進(jìn)行了有關(guān)現(xiàn)場(chǎng)實(shí)驗(yàn),具體實(shí)驗(yàn)結(jié)果如圖2所示(實(shí)驗(yàn)數(shù)據(jù)為現(xiàn)場(chǎng)的同步錄像)。
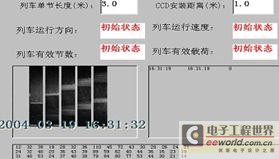
(a) 列車進(jìn)入監(jiān)測(cè)現(xiàn)場(chǎng)

(b) 列車駛出監(jiān)測(cè)現(xiàn)場(chǎng)
圖2 井下現(xiàn)場(chǎng)獲得的實(shí)驗(yàn)結(jié)果
現(xiàn)場(chǎng)實(shí)驗(yàn)結(jié)果表明:本系統(tǒng)能夠完成軌道運(yùn)輸?shù)母黜?xiàng)監(jiān)測(cè)任務(wù),監(jiān)控者可以方便地了解列車運(yùn)動(dòng)速度、運(yùn)動(dòng)方向、列車異常情況、列車有效載荷等多項(xiàng)重要數(shù)據(jù)。系統(tǒng)運(yùn)行穩(wěn)定、可靠、準(zhǔn)確。
4 結(jié) 論
綜上所述,根據(jù)礦井環(huán)境的特殊性和井下運(yùn)輸監(jiān)測(cè)的要求,采用基于非接觸式的圖象處理方法來實(shí)現(xiàn)礦井軌道運(yùn)輸監(jiān)測(cè),井上監(jiān)控中心不僅能及時(shí)、準(zhǔn)確地觀察到一些數(shù)字化的指標(biāo),更可以直接看到井下現(xiàn)場(chǎng)的監(jiān)控圖象。這對(duì)于管理者全面、準(zhǔn)確了解井下運(yùn)輸生產(chǎn)情況,確保礦井安全具有重要的現(xiàn)實(shí)意義。
另外,紅外CCD礦井軌道運(yùn)輸監(jiān)測(cè)系統(tǒng)同樣也可以在膠帶運(yùn)輸?shù)绕渌V井運(yùn)輸環(huán)境中使用,具有廣泛的應(yīng)用前景。
本文的創(chuàng)新點(diǎn):
1、提出了采用視頻圖象處理方法,利用模式識(shí)別、最優(yōu)閾值和幾何相似理論,實(shí)現(xiàn)了非接觸式的監(jiān)控與測(cè)量。
2、提出了位置變化量、產(chǎn)生變化量所需的時(shí)間、紅外CCD視場(chǎng)(角度)等六因素相互關(guān)聯(lián)的計(jì)算方法。