
引言
混合動力技術(shù)是解決汽車能源和污染問題的重要途徑。混合動力系統(tǒng)根據(jù)結(jié)構(gòu)可以分為串聯(lián)式、并聯(lián)式和混聯(lián)式。串聯(lián)式混合動力系統(tǒng)發(fā)動機(jī)與車輛完全機(jī)械解耦,其運(yùn)行工況不受汽車行駛工況的影響,可始終控制在優(yōu)化的工作區(qū)穩(wěn)定運(yùn)行,最適合負(fù)載頻繁變化的城市公交車。
串聯(lián)式混合動力系統(tǒng)的核心部件包括輔助動力單元(APU)、儲能單元和電動機(jī)等,其中APU是系統(tǒng)的主要能量來源,它的選型和匹配對系統(tǒng)性能的影響很大。此外,在混合動力系統(tǒng)中應(yīng)用制動能量回收策略和怠速停機(jī)策略可以大幅提高系統(tǒng)的燃油經(jīng)濟(jì)性[223],但也需要一些能量分配策略和系統(tǒng)結(jié)構(gòu)設(shè)計(jì)方面的變化。
本研究為一輛12m串聯(lián)式混合動力城市客車開發(fā)了一套基于天然氣發(fā)動機(jī)的APU,并優(yōu)化了APU結(jié)構(gòu),在發(fā)動機(jī)和發(fā)電機(jī)之間增加離合器來保證APU起動的可靠平順,最后對該APU系統(tǒng)進(jìn)行了臺架和實(shí)車試驗(yàn),驗(yàn)證其性能。
1 選型與匹配
根據(jù)整車的功率要求來選擇發(fā)動機(jī)和發(fā)電機(jī)。
通常用于12m城市客車的天然氣發(fā)動機(jī)為170~190kW的6缸機(jī),采用串聯(lián)式混合動力系統(tǒng)之后,發(fā)動機(jī)只工作在優(yōu)化的工況區(qū)域,對發(fā)動機(jī)最大功率的要求可以降低很多。
經(jīng)仿真計(jì)算,APU系統(tǒng)所需的平均功率約為40kW,標(biāo)定功率不低于70kW,峰值功率不低于80kW。發(fā)動機(jī)輸出功率至APU輸出功率的轉(zhuǎn)換效率為80%~85%,因此對發(fā)動機(jī)的基本要求為標(biāo)定功率大于87kW,峰值功率大于100kW,功率50kW附近有較高效率。因此,本研究最終選擇4CT180天然氣發(fā)動機(jī),該機(jī)標(biāo)定功率132kW,標(biāo)定功率轉(zhuǎn)速2300r/min,最大扭矩680N·m,最大扭矩轉(zhuǎn)速1500r/min,排放達(dá)到歐洲標(biāo)準(zhǔn)。發(fā)動機(jī)的優(yōu)化工況區(qū)域?yàn)?200~1500r/min,在此區(qū)間內(nèi)發(fā)動機(jī)最大輸出功率為106kW,滿足設(shè)計(jì)要求。
發(fā)電機(jī)的選取必須與發(fā)動機(jī)的輸出相匹配。交流永磁同步電機(jī)具有效率高、功率密度大的特點(diǎn),適合用作APU的發(fā)電機(jī)。本研究選擇StamfordUC274C發(fā)電機(jī),其標(biāo)定狀態(tài)為100kVA,380V,152A(最大電流),50Hz,1500r/min,勵磁輸入為42V,5A,輸入軸可承受轉(zhuǎn)矩大于700N·m。發(fā)電機(jī)的輸出還需經(jīng)過整流器由交流變?yōu)橹绷骱蟛攀茿PU的輸出,本研究選擇了效率較高的不可控整流器,可傳遞功率120kW。
2 APU結(jié)構(gòu)設(shè)計(jì)
串聯(lián)式混合動力系統(tǒng)中,APU的輸出與驅(qū)動電機(jī)、動力電池通過電系統(tǒng)耦合在一起,因此,各部件機(jī)械結(jié)構(gòu)相對獨(dú)立,可以分開設(shè)計(jì)。APU的結(jié)構(gòu)設(shè)計(jì)主要考慮發(fā)動機(jī)和發(fā)電機(jī)之間的連接方式。
傳統(tǒng)APU的結(jié)構(gòu)設(shè)計(jì)比較簡單,多采用發(fā)動機(jī)輸出軸—過渡連接盤—發(fā)電機(jī)輸入軸的形式直接連接發(fā)動機(jī)和發(fā)電機(jī)。由于發(fā)電機(jī)轉(zhuǎn)子的轉(zhuǎn)動慣量非常大(約1kg·m2),接近發(fā)動機(jī)曲軸轉(zhuǎn)動慣量的10倍,直連方式會致使發(fā)動機(jī)無論何時都要承受額外負(fù)擔(dān)。起動時,由于轉(zhuǎn)動慣量增大,發(fā)動機(jī)可能出現(xiàn)“起不來”的現(xiàn)象,嚴(yán)重時還會燒毀起動電機(jī);而怠速時,發(fā)動機(jī)需多驅(qū)動一個巨大的轉(zhuǎn)子,會有能量損失。
對于串聯(lián)式混合動力城市客車來說,發(fā)動機(jī)工作在怠速工況的時間很長,APU直連方式造成的能量損失累計(jì)起來就很大。若采用怠速停機(jī)策略降低系統(tǒng)能耗,發(fā)動機(jī)需頻繁起停,其起動必須平順可靠,而直連方式難以保證這一點(diǎn)。
針對上述問題,本研究提出了一種發(fā)動機(jī)和發(fā)電機(jī)非直接連接的結(jié)構(gòu)(見圖1)。發(fā)動機(jī)和發(fā)電機(jī)之間增加了1個電控離合器,APU可以在離合器脫開的情況下空載起動發(fā)動機(jī),再通過電控系統(tǒng)控制離合器平順接合,使發(fā)動機(jī)驅(qū)動發(fā)電機(jī)輸出能量。
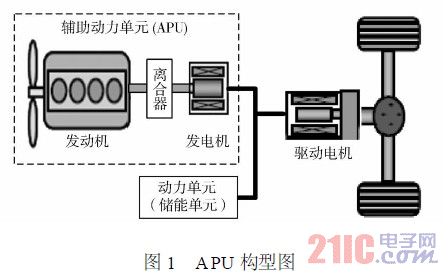
若發(fā)動機(jī)需長期處于怠速狀態(tài),APU也可以脫開離合器以減少能量損失。
2.1 電控離合器系統(tǒng)結(jié)構(gòu)
電控離合器系統(tǒng)結(jié)構(gòu)見圖2,由氣路部分、控制部分、機(jī)械部分和氣動部分組成。
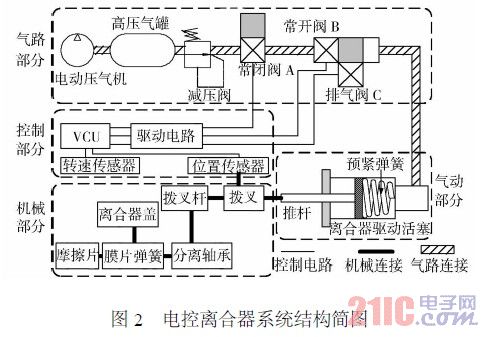
氣路部分包括電動壓氣機(jī)、高壓氣罐、減壓閥、進(jìn)氣閥和進(jìn)排氣兩位三通閥。壓氣機(jī)可以將高壓氣罐內(nèi)的空氣壓力保持在0.6~0.8MPa,氣罐出口與減壓閥相連,確保后面氣路中氣體壓力保持不變,便于控制計(jì)算。進(jìn)氣閥為常閉閥A,需要時才打開讓高壓氣體通過。進(jìn)排氣兩位三通閥包括常開閥B和排氣閥C,兩者配合控制可以調(diào)節(jié)進(jìn)入驅(qū)動活塞氣缸的氣體壓力。
氣動部分主要是1個高壓氣驅(qū)動的活塞,調(diào)節(jié)氣缸的氣壓,可以改變活塞輸出力的大小。活塞的有效驅(qū)動直徑可以由式(1)確定,式中,Dmin為活塞的最小直徑,F(xiàn)min為脫開離合器所需的最小力,pmax為氣缸內(nèi)氣體能達(dá)到的最大壓力。

機(jī)械部分的撥叉與驅(qū)動活塞的推桿鉸鏈,推桿的初始位置和極限位置分別對應(yīng)了離合器的接合和脫開狀態(tài)。
控制部分的轉(zhuǎn)速傳感器為整車控制單元(VCU)提供發(fā)動機(jī)轉(zhuǎn)速信息,VCU根據(jù)該信息選擇離合器接合/脫開的時機(jī);位置傳感器與撥叉相連,為VCU提供離合器的狀態(tài)信息。VCU的輸出經(jīng)驅(qū)動電路可直接控制常閉閥A、常開閥B和排氣閥C的開閉,調(diào)節(jié)驅(qū)動活塞的氣缸壓力,從而控制離合器的接合與脫開。
2.2 APU起動控制
APU的起動控制需與電控離合器系統(tǒng)的控制相配合,起動過程可以分為3步:脫開離合器、發(fā)動機(jī)起動至平穩(wěn)工況和接合離合器。起動過程要求離合器脫開迅速可靠,接合平穩(wěn),對發(fā)動機(jī)沖擊盡可能小。
APU發(fā)出起動指令后,離合器首先脫開,其過程為VCU向常閉閥A輸出高電平信號,使其打開,高壓氣體通過常閉閥A和常開閥B進(jìn)入氣缸推動活塞運(yùn)動,使離合器脫開。脫開過程所用時間與高壓氣壓力以及活塞有效截面積有關(guān)。氣體壓力越高,截面越大,活塞作用力越大,離合器脫開所用時間越短。此外,從常閉閥A到活塞氣缸的氣路長度也會對脫開時間有影響。
發(fā)動機(jī)在離合器脫開后起動,起動成功后,APU發(fā)出接合離合器指令。接合過程可以分為3個階段(見圖3)。第一階段,離合器壓盤與發(fā)動機(jī)飛輪沒有接觸,分離軸承位移增加,但離合器不傳遞扭矩;第二階段,壓盤與飛輪開始接合,隨著分離軸承位移增加,離合器傳遞的扭矩也增加;第三階段,壓盤與飛輪完全接合,離合器傳遞的扭矩不再增加。接合過程控制目標(biāo)是盡可能縮短第一、第三階段的時間,同時保證第二階段接合轉(zhuǎn)矩的上升不要過快,減少對發(fā)動機(jī)的沖擊。
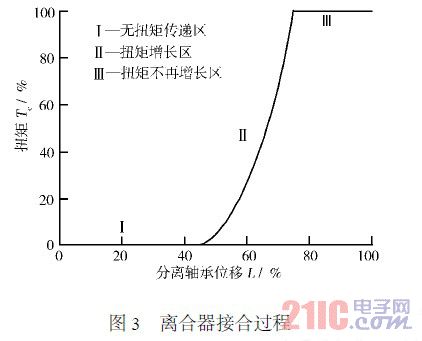
離合器控制過程中,首先關(guān)閉常開閥B以形成常開閥B至活塞氣缸的封閉回路,之后調(diào)節(jié)排氣閥C的開閉頻率,控制氣缸內(nèi)氣壓降低的速度,實(shí)現(xiàn)三階段接合過程。
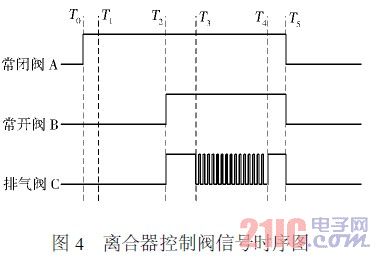
APU起動過程的控制閥信號時序見圖4。T0時刻是起動過程的起始時刻,T0~T1離合器脫開,T1~T2發(fā)動機(jī)起動,T2~T3,T3~T4,T4~T5分別為離合器接合過程的第一、第二和第三階段,排氣閥C上輸出不同占空比的信號。
3 試驗(yàn)驗(yàn)證
3.1 APU起動過程驗(yàn)證
在試驗(yàn)臺架上驗(yàn)證APU起動過程。試驗(yàn)前先標(biāo)定離合器分離軸承位置與離合器狀態(tài)之間的關(guān)系,以離合器完全脫開時分離軸承的位置作為零點(diǎn),壓盤與飛輪剛開始接觸時分離軸承位移為8mm,壓盤與飛輪完全接合時分離軸承位移為16mm,分離軸承的最大位移為18mm。
APU接到起動指令后,首先發(fā)出脫開離合器指令(見圖5),高壓氣進(jìn)入驅(qū)動活塞氣缸,推動分離軸承從離合器接合位置運(yùn)動至離合器完全脫開,整個過程持續(xù)0.85s。
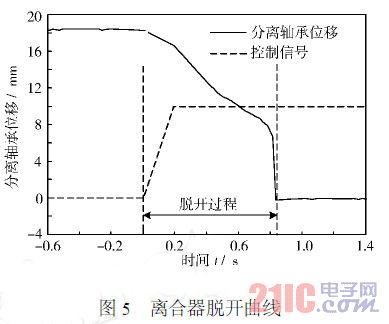
當(dāng)離合器進(jìn)入脫開狀態(tài)后,APU向發(fā)動機(jī)發(fā)出起動指令。發(fā)動機(jī)5s內(nèi)可以完成起動,進(jìn)入怠速狀態(tài),轉(zhuǎn)速為700r/min左右。
第6s起,APU發(fā)出接合離合器指令(見圖6)。
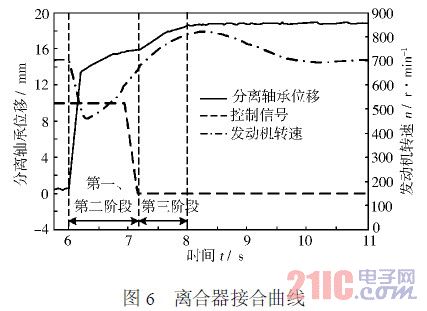
分離軸承的動作在接合過程中經(jīng)歷了先快、后慢、再快的過程,與前文所述離合器接合過程3個階段相符。由于第三階段分離軸承位移對發(fā)動機(jī)的扭矩輸出沒有影響,所以認(rèn)為離合器的接合過程到第二階段結(jié)束就已完成,總共需要1.2s。離合器接合過程對發(fā)動機(jī)的沖擊使發(fā)動機(jī)轉(zhuǎn)速下降200r/min左右,在可接受范圍。
第7.2s起,發(fā)動機(jī)飛輪與離合器壓盤完全接合,APU起動過程完成,可以向發(fā)電機(jī)發(fā)出勵磁信號,APU對外輸出能量。
3.2 APU整車性能試驗(yàn)
將APU裝配在一輛串聯(lián)式混合動力城市客車上,在實(shí)際道路條件下與一輛同類型普通天然氣城市客車做對比試驗(yàn)。對比車型采用130kW6缸天然氣發(fā)動機(jī),5擋手動變速器,車身尺寸與混合動力客車相同。混合動力客車由于增加了電機(jī)、動力電池等設(shè)備,整備質(zhì)量較對比車型略重。氣耗試驗(yàn)時,兩車采用同樣的城市公交駕駛循環(huán),且保證混合動力客車的動力電池測試前后SOC保持不變。排放試驗(yàn)由于條件限制,只能在臺架上進(jìn)行,測試工況由道路工況反推得到。
由于整備質(zhì)量增加,串聯(lián)式混合動力城市客車動力性不如普通天然氣客車,但還能滿足城市公交運(yùn)行工況。混合動力客車的燃?xì)庀牧亢团欧啪陀谄胀蛙嚕砻髟揂PU系統(tǒng)運(yùn)用在整車上時,可以降低燃油消耗和減少排放。

4 結(jié)語
a)APU起動過程需7.2s,其中離合器脫開過程0.85s,接合過程1.2s,對發(fā)動機(jī)沖擊保持在可接受范圍內(nèi),滿足整車控制要求;
b)該APU應(yīng)用在整車上,與同類型普通天然氣城市客車相比,燃?xì)庀牧拷档土?6%,NOx排放降低70%,CO排放降低65%,HC降低40%,具有節(jié)能減排效果。