
1 引言
筆者多年研究軟起動(dòng)器,發(fā)現(xiàn)軟起動(dòng)器對(duì)電動(dòng)機(jī)的過載保護(hù)有些簡單化,雖然說是反時(shí)限保護(hù),但實(shí)際是采用定時(shí)分段的辦法,有時(shí)誤動(dòng)作,有時(shí)燒電動(dòng)機(jī)。對(duì)于電動(dòng)機(jī)斷續(xù)過載保護(hù)時(shí)由于電動(dòng)機(jī)早已過熱,那么它的過載能力已經(jīng)減小,對(duì)于冷態(tài)的電動(dòng)機(jī)來說,它的過載能力要比熱態(tài)的電動(dòng)機(jī)過載能力大的多。如果要真正反應(yīng)電動(dòng)機(jī)的過載能力又能對(duì)電動(dòng)機(jī)起到過載保護(hù)就必需通過熱積分,采用熱記憶功能。這樣才能保正系統(tǒng)的可靠性和保護(hù)的靈敏性。
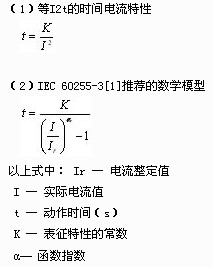
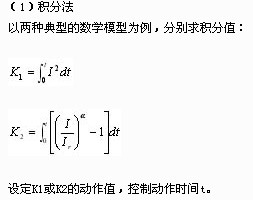
1.1 兩種典型的數(shù)學(xué)模型
軟起動(dòng)器對(duì)電動(dòng)機(jī)具有控制、保護(hù)、監(jiān)測(cè)等功能,對(duì)電動(dòng)機(jī)的熱過載保護(hù)采用的反時(shí)限保護(hù)特性有多種數(shù)學(xué)模型,其中典型的有兩類:
1.2 脫扣器的控制方式
脫扣器的控制方式可采用:
(2)查表法
設(shè)定I—t對(duì)照表,根據(jù)當(dāng)前I控制動(dòng)作時(shí)間t。
但是在實(shí)際運(yùn)行中兩種方法均存在弊端。如用積分法上述的兩類數(shù)學(xué)模型都可能造成在低于動(dòng)作值時(shí)仍能誤動(dòng)作;如用查表法在通常電流不斷變化的情況下,很難合理的控制過載脫扣的延時(shí)時(shí)間。
為了較好的解決低壓斷路器的智能控制器中長延時(shí)脫扣器的延時(shí)控制,本文試圖按熱保護(hù)的基本原理進(jìn)行分析和探討。
2 熱保護(hù)的基本要求
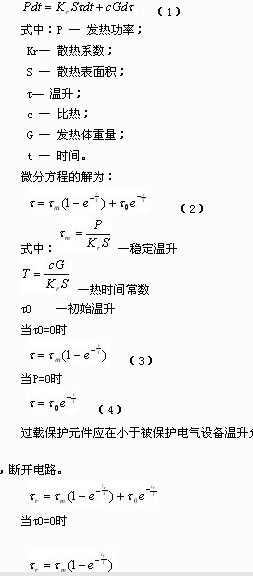
根據(jù)熱平衡關(guān)系,電氣設(shè)備的發(fā)熱應(yīng)等于散熱與蓄熱之和,即
按電動(dòng)機(jī)起動(dòng)器和斷路器的要求,k2應(yīng)分別小于1.2和1.3,為同時(shí)滿足這兩種要求,并留有裕度,可取k2=1.1~1.15。
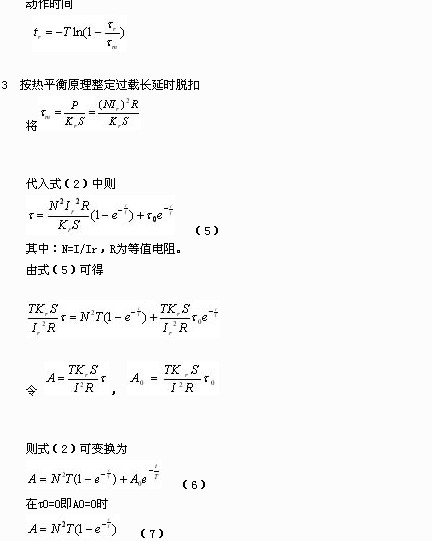
由式(11)可取


4.3 延時(shí)時(shí)間的計(jì)算
按式(13)計(jì)算在不同過載電流下的延時(shí)時(shí)間,并考慮電流測(cè)量誤差的影響,計(jì)算結(jié)果見表1(計(jì)算時(shí)取T=642s)。
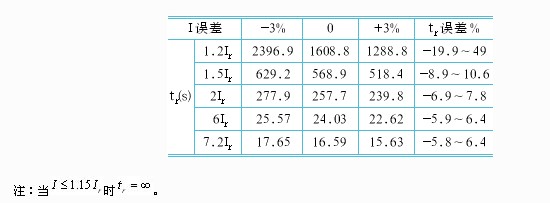
表1 不同過載電流下的延時(shí)時(shí)間的計(jì)算值
5 動(dòng)作值的測(cè)量和計(jì)算
為測(cè)量智能脫扣器實(shí)態(tài)通電時(shí)的A值,可以采用數(shù)值積分的方法等間隔的測(cè)量電流和計(jì)算A值并與K值比較。
設(shè)測(cè)量間隔為Δt,并且初始溫升為0,由式(6)和(7)
A0=0
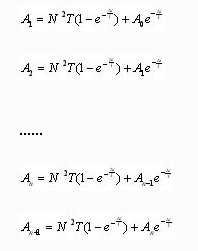
上列各式中N可以為變量。
逐次計(jì)算,逐次與k比較,直至Ax≥k時(shí)控制器動(dòng)作。則
在有輔助電源的情況下,A值逐漸遞減,直至軟起動(dòng)器重新起動(dòng),A值又開始遞增;或輔助電源斷開,A值清零。
為防止過載脫扣后,軟起動(dòng)器在短時(shí)內(nèi)的再接通并在短時(shí)內(nèi)再分?jǐn)啵稍O(shè)置一定的恢復(fù)時(shí)間,以保證在恢復(fù)時(shí)間內(nèi),軟起動(dòng)器不得起動(dòng)。
6 測(cè)量誤差分析
對(duì)式(8)微分:
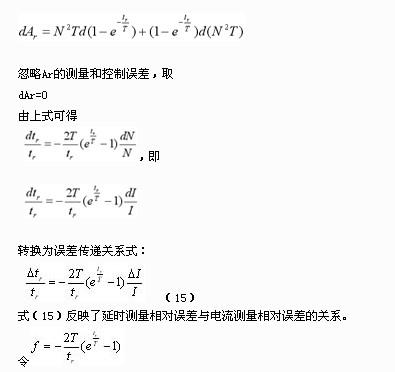
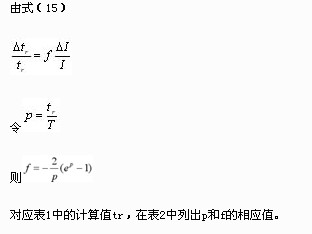
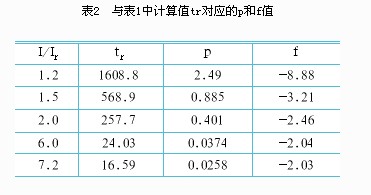
表2的誤差傳遞系數(shù)f的估算值與表1的計(jì)算結(jié)果基本相符。
由表1及表2可以看出在較低過載倍數(shù)下由電流測(cè)量誤差所引起的延時(shí)時(shí)間誤差較大。
7 保護(hù)特性的斜率調(diào)節(jié)
7.1 建立數(shù)學(xué)模型
為了滿足不同的配合需要,現(xiàn)在有的制造廠提供了改變長延時(shí)保護(hù)特性斜率的調(diào)節(jié)功能[2]或參照IEC 60255標(biāo)準(zhǔn)提供了不同數(shù)學(xué)模型的保護(hù)特性。為了實(shí)現(xiàn)保護(hù)特性的斜率調(diào)節(jié),本文推薦兩種數(shù)學(xué)模型并用的方案。
(1)基本數(shù)學(xué)模型
經(jīng)對(duì)比分析我們可以以式(7)作為基本保護(hù)特性的基本數(shù)學(xué)模型。
(2)用于斜率調(diào)節(jié)的數(shù)學(xué)模型
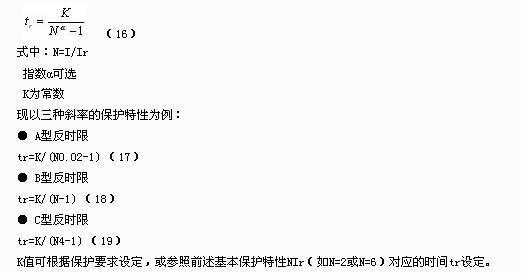
可選用國家標(biāo)準(zhǔn)GB 14598.7(等同IEC 60255-3)推薦的數(shù)學(xué)模型用于斜率調(diào)節(jié)。根據(jù)GB 14598.7:
7.2 動(dòng)作值的測(cè)量和控制
將式(17)、(18)、(19)變換為
A=t(N0.02-1) (20)
A=t(N-1) (21)
A=t(N4-1) (22)
在實(shí)際運(yùn)行中可每經(jīng)過一個(gè)等間隔Δt進(jìn)行一次累加,逐次計(jì)算A值,逐次與K值比較,直至達(dá)到設(shè)定值K值,求出延時(shí)時(shí)間tr。
以式(21)為例,設(shè)
對(duì)應(yīng)式(20)和(22)可以采用同樣方法進(jìn)行計(jì)算和控制。
但是應(yīng)用此方法計(jì)算有兩個(gè)問題需要解決:
(1)設(shè)定N的閾值
通常在K的設(shè)定值范圍,在N=1.05的條件下,計(jì)算值tr很可能小于1h,不能滿足軟起動(dòng)器要求。為了防止在1.05Ir及以下的誤脫扣,需設(shè)定閾值,如設(shè)定Nd=1.15,當(dāng)N≤Nd時(shí)可仍按基本數(shù)學(xué)模型控制和計(jì)算。
(2)閾值上下數(shù)學(xué)模型的轉(zhuǎn)換
如在N>Nd時(shí),按式(20)~(22)的數(shù)學(xué)模型進(jìn)行計(jì)算和控制。
現(xiàn)舉例說明如下
保護(hù)特性取式(21),設(shè)定K=13.5
根據(jù)式(12)計(jì)算T值,取k2=1.15
T=13.5/1.152=10.2
在N≤Nd時(shí)按前面第4節(jié)所述方法進(jìn)行計(jì)算和控制。
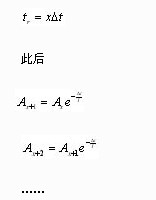
在N>Nd時(shí)按式(21)的數(shù)學(xué)模型進(jìn)行計(jì)算,如果在尚未達(dá)到動(dòng)作值時(shí)電流又下降使N≤Nd,并且當(dāng)前A值為Ay。則此后需按基本數(shù)學(xué)模型累加計(jì)算A值:
式中初始值A(chǔ)y為原數(shù)學(xué)模型下保留的A值。以下按前面第4節(jié)所述方法進(jìn)行計(jì)算和控制。
如果此后又回復(fù)N>Nd條件,應(yīng)重新按式(21)的數(shù)學(xué)模型計(jì)算和控制。在反復(fù)轉(zhuǎn)換數(shù)學(xué)模型時(shí)不需改變K值和當(dāng)前的A值。
保護(hù)特性取式(22),設(shè)定K=1200
根據(jù)式(12)計(jì)算T值,取k2=1.15
T=1200/1.152=907.4
在N≤Nd時(shí)按前面第4節(jié)所述方法進(jìn)行計(jì)算和控制。
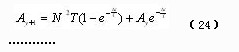
在N>Nd時(shí)按式(22)的數(shù)學(xué)模型進(jìn)行計(jì)算,如果在尚未達(dá)到動(dòng)作值電流又下降至N≤Nd,并且當(dāng)前A值為Ay。則需按式(24)計(jì)算A值。
如果此后又回復(fù)N>Nd條件,應(yīng)重新按式(22)的數(shù)學(xué)模型計(jì)算和控制。在反復(fù)轉(zhuǎn)換數(shù)學(xué)模型時(shí)不需改變K值和當(dāng)前A值。
7.3 誤差分析
對(duì)式(16)微分
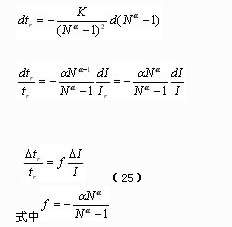
式(19)、(20)和(21)三種數(shù)學(xué)模型時(shí)間相對(duì)誤差與電流相對(duì)誤差之間的傳遞系數(shù)計(jì)算值見表3。
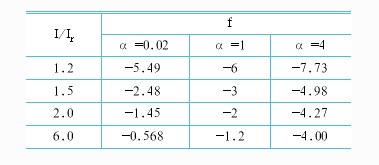
表3 三種數(shù)學(xué)模型時(shí)間相對(duì)誤差與電流相對(duì)誤差之間的傳遞系數(shù)計(jì)算值
由表3中可見,當(dāng)α=0.02和α=1時(shí)在Nr≥1.5的情況下,要滿足延時(shí)時(shí)間的誤差不超過±10%的要求并不困難;但是在α=4時(shí),因特性曲線斜率值大,要達(dá)到同樣的指標(biāo)是有一定難度的,即使電流測(cè)量誤差為±2%,再考慮K的控制誤差和數(shù)值化整等因素,延時(shí)時(shí)間的誤差也可能大于±10%。
8 結(jié)束語
本文提出的一套利用數(shù)值積分法解決反時(shí)限保護(hù)特性的實(shí)時(shí)測(cè)量和控制方法,既可比較合理、方便的提供多種保護(hù)特性,又可較好的解決負(fù)載不斷變化情況下的熱記憶問題,還有助于提高長延時(shí)控制單元的抗干擾能力。
由于在實(shí)時(shí)控制中,微處理器在很短時(shí)間內(nèi)無法完成一些函數(shù)的復(fù)雜數(shù)學(xué)運(yùn)算,本文中的一些計(jì)算公式和參數(shù)在工程計(jì)算中需要進(jìn)行了變換和處理,在CMC系列軟起動(dòng)器中得到了應(yīng)用,通過實(shí)際運(yùn)行達(dá)到了理想的效果。