
現(xiàn)代注塑機(jī)的發(fā)展重點(diǎn)在于提高控制水平和整機(jī)自動(dòng)化程度,以及整機(jī)優(yōu)化設(shè)計(jì)和加工工藝的改進(jìn)方面,以滿足對(duì)于注塑制品質(zhì)量及節(jié)能的要求。隨著微電子技術(shù)的發(fā)展,嵌入式系統(tǒng)芯片以集成度高,價(jià)格低,性能強(qiáng)大而得到廣泛應(yīng)用。利用32位的ARM處理器實(shí)現(xiàn)注塑生產(chǎn)過(guò)程的自動(dòng)控制,實(shí)時(shí)顯示并在線修改各階段的過(guò)程參數(shù),這不僅提高了注塑機(jī)自動(dòng)化程度,而且大大提高了塑料制品的生產(chǎn)效率和產(chǎn)品質(zhì)量。
1 注塑機(jī)的組成及其工作過(guò)程
1.1 注塑機(jī)的組成
該控制器以電動(dòng)一液壓相結(jié)合的復(fù)合式注塑機(jī)為控制對(duì)象,它是集機(jī)-電-液于一體的典型系統(tǒng)。它主要由液壓油路系統(tǒng)、合模系統(tǒng)、注射系統(tǒng)、加熱冷卻系統(tǒng)、潤(rùn)滑系統(tǒng)、電氣控制系統(tǒng)、安全保護(hù)裝置、監(jiān)測(cè)系統(tǒng)及供料等輔助系統(tǒng)組成。注塑機(jī)的各個(gè)部分互相牽制、互相協(xié)調(diào)地完成注塑機(jī)的循環(huán)動(dòng)作。其中電氣控制系統(tǒng)是注塑機(jī)的“中樞神經(jīng)”,它控制著注塑機(jī)的各種程序及動(dòng)作,對(duì)時(shí)間、位置、壓力、速度和轉(zhuǎn)速等進(jìn)行有效的控制與調(diào)節(jié)。該控制器實(shí)現(xiàn)注塑機(jī)電氣控制系統(tǒng)的控制功能。
1.2 注塑機(jī)的工作過(guò)程
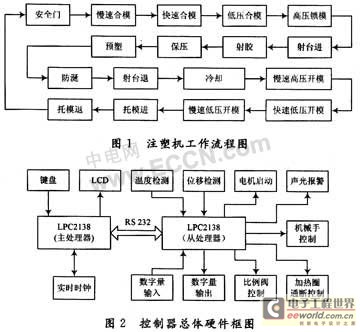
現(xiàn)代注塑機(jī)的控制器主要由注塑機(jī)工藝流程控制、料筒溫度控制、人機(jī)界面等部分組成,能夠?qū)崿F(xiàn)對(duì)注塑機(jī)整個(gè)工藝流程進(jìn)行控制;對(duì)注塑過(guò)程中的流量、壓力、位置以及料桶溫度的控制;對(duì)注塑工作過(guò)程參數(shù)的顯示與在線參數(shù)修改。注塑機(jī)的工作過(guò)程其實(shí)就是一個(gè)過(guò)程控制。當(dāng)要執(zhí)行某一個(gè)動(dòng)作時(shí),控制器必須輸出相應(yīng)的控制信號(hào)使相關(guān)的電磁閥通電,否則不能正常工作,而當(dāng)檢測(cè)到對(duì)應(yīng)的行程開(kāi)關(guān)或接近開(kāi)關(guān)的輸入信號(hào)后,就可撤除控制信號(hào)使電磁閥失電,以結(jié)束該動(dòng)作,然后根據(jù)工藝要求進(jìn)行下一個(gè)動(dòng)作或停止工作。其工作流程如圖1所示。
2 系統(tǒng)硬件電路的設(shè)計(jì)
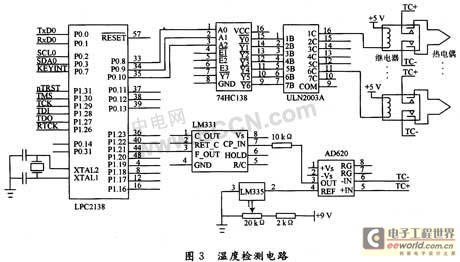
該控制器由2個(gè)控制模塊構(gòu)成,采用主從式結(jié)構(gòu)來(lái)控制注塑機(jī)的注塑過(guò)程、溫度、人機(jī)界面、通信等工作。兩個(gè)控制模塊各由一個(gè)處理器來(lái)進(jìn)行管理,處理器均采用ARM處理器LPC2138,其中一個(gè)處理器負(fù)責(zé)鍵盤(pán)及LCD顯示管理,實(shí)現(xiàn)參數(shù)在線設(shè)定及顯示,以提供友好的人機(jī)界面;另外一個(gè)處理器負(fù)責(zé)檢測(cè)注塑機(jī)的各路輸入情況,并實(shí)現(xiàn)對(duì)注塑的過(guò)程控制與料筒溫度控制。兩者之間采用RS 232C串行接口進(jìn)行實(shí)時(shí)通信以實(shí)現(xiàn)信息與數(shù)據(jù)的交換。系統(tǒng)硬件總體框圖如圖2所示。
鍵盤(pán)電路控制器需要實(shí)現(xiàn)注塑機(jī)的各種動(dòng)作及控制參數(shù)的輸入,因此鍵盤(pán)電路必不可少。鍵盤(pán)電路采用ZLG7290鍵盤(pán)管理器,它可采樣64個(gè)按鍵或傳感器,并可檢測(cè)每個(gè)按鍵的連擊次數(shù),而且具有鍵盤(pán)去抖動(dòng)處理、雙鍵互鎖處理等功能,因此省去了鍵盤(pán)掃描及去抖等相關(guān)處理軟件的編制,這樣不僅節(jié)省了程序空間,而且簡(jiǎn)化了編程。每當(dāng)有按鍵按下,ZI.G7290會(huì)產(chǎn)生中斷信號(hào),此時(shí)LPC2138可通過(guò)I2C接口從ZLG7290內(nèi)部讀取鍵值,這樣就可判斷出按鍵的具體位置。
液晶顯示 LCD模塊選用320×240圖形點(diǎn)陣型液晶顯示模塊,主機(jī)設(shè)計(jì)有與LCD模塊模塊的接口,可以將其介入,這樣就可實(shí)現(xiàn)對(duì)注塑機(jī)工藝參數(shù)的實(shí)時(shí)監(jiān)視、各個(gè)關(guān)鍵參數(shù)的在線修改以及命令輸入提示。
數(shù)字量輸入/輸出電路 數(shù)字量的輸入與輸出均通過(guò)光耦隔離電路,以將控制器與執(zhí)行機(jī)構(gòu)在電氣上進(jìn)行隔離,防止高壓產(chǎn)生干擾破壞處理器程序的運(yùn)行。輸入信號(hào)經(jīng)整形后送往數(shù)據(jù)總線共ARM處理器讀取。輸出數(shù)字量通過(guò)功率放大電路后直接驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)動(dòng)作。
位移檢測(cè)電路 設(shè)計(jì)有3路位移檢測(cè)電路,分別實(shí)現(xiàn)對(duì)螺桿位置、開(kāi)關(guān)模位置和托模機(jī)構(gòu)的位置檢測(cè),檢測(cè)出的位移量作為切換壓力和速度的一個(gè)依據(jù)。位移檢測(cè)采用的傳感器是位移電子尺,位移電子尺給出的信號(hào)是模擬信號(hào)經(jīng)A/D轉(zhuǎn)換器ADS7844得到相應(yīng)的數(shù)字量,LPC2138可以通過(guò)SPI口讀取ADS7844的轉(zhuǎn)換結(jié)果。
比例閥控制電路 控制器設(shè)計(jì)有2路比例閥控制電路,以提供流量和壓力的控制。比例閥的控制采用PWM技術(shù),PWM信號(hào)直接由硬件電路產(chǎn)生,PWM信號(hào)經(jīng)過(guò)三極管放大后通過(guò)達(dá)林頓管去驅(qū)動(dòng)比例閥工作。
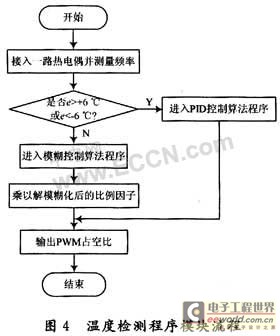
料筒溫度檢測(cè)和加熱控制電路 此電路位于從機(jī)部分,是本控制器的設(shè)計(jì)重點(diǎn),因?yàn)榱贤矞囟葘?duì)制品的質(zhì)量有直接的關(guān)系。由于加溫系統(tǒng)存在大慣量,加上電源電壓波動(dòng)等環(huán)境因素的影響,往往難以獲得理想的品質(zhì)因素,因而需要采取相應(yīng)的軟硬件措施,以獲得穩(wěn)定、可靠的溫度控制效果。控制器設(shè)計(jì)有6路溫度檢測(cè)通道,溫度檢測(cè)傳感器采用K型熱電偶,其測(cè)溫范圍為0~400℃。熱電偶信號(hào)經(jīng)過(guò)儀表放大器AD620放大后,再將其進(jìn)行V/F轉(zhuǎn)換,以實(shí)現(xiàn)模/數(shù)轉(zhuǎn)換。采用V/F轉(zhuǎn)換電路是因?yàn)轭l率信號(hào)的抗干擾能力強(qiáng),且實(shí)現(xiàn)模/數(shù)轉(zhuǎn)換的性價(jià)比高。6路溫度檢測(cè)的切換采用繼電器控制,以減小導(dǎo)通電阻帶來(lái)的溫度測(cè)量誤差,且能夠?qū)崿F(xiàn)信號(hào)與系統(tǒng)的隔離。加熱控制電路也采用繼電器控制,繼電器的輸出可直接驅(qū)動(dòng)電磁繼電器或固態(tài)繼電器以控制加熱裝置的電源開(kāi)關(guān)。另外熱電偶的冷端補(bǔ)償采用集成溫度傳感器來(lái)實(shí)現(xiàn)。具體的溫度測(cè)量電路如圖3所示。
3 軟件設(shè)計(jì)
控制器的軟件設(shè)計(jì)采用模塊化設(shè)計(jì)。主機(jī)部分的軟件分主要包括鍵盤(pán)、顯示、通信和實(shí)時(shí)時(shí)鐘模塊。從機(jī)部分的軟件相對(duì)比較復(fù)雜,主要有通信模塊、溫度檢測(cè)控制模塊、比例閥控制模塊、位移檢測(cè)模塊、工藝流程控制模塊等。
3.1 主機(jī)軟件設(shè)計(jì)
主機(jī)部分軟件分2大模塊,即鍵盤(pán)與顯示模塊、通信模塊。其中,鍵盤(pán)與顯示模塊負(fù)責(zé)管理64鍵鍵盤(pán)和液晶顯示器,由于鍵較多,采用“狀態(tài)轉(zhuǎn)移法”的鍵控程序,根據(jù)所按下的鍵執(zhí)行相應(yīng)的程序,在液晶顯示器上顯示相應(yīng)的操作頁(yè)面,進(jìn)行參數(shù)設(shè)置與顯示,并實(shí)時(shí)顯示注塑機(jī)當(dāng)前所處的工作狀態(tài)。
通訊模塊負(fù)責(zé)與下位機(jī)通信,控制器中的串行通訊也采用主從式結(jié)構(gòu),即由主機(jī)發(fā)出通信要求,如參數(shù)設(shè)置、手動(dòng)操作、運(yùn)行狀態(tài)讀出等,而從機(jī)CPU則根據(jù)主機(jī)CPU的要求給出回應(yīng)。
3.2 從機(jī)軟件設(shè)計(jì)
從機(jī)軟件主要是實(shí)現(xiàn)對(duì)注塑機(jī)工藝流程流程控制。控制器根據(jù)當(dāng)前注塑機(jī)所處的工作狀態(tài)(手動(dòng)、半自動(dòng)、全自動(dòng)等)以及各個(gè)輸入狀態(tài)(行程開(kāi)關(guān)、電子尺、鍵盤(pán)操作命令等)來(lái)控制注塑機(jī)的各個(gè)工藝流程的進(jìn)行。在手動(dòng)模式下,注塑機(jī)的各個(gè)動(dòng)作可以單獨(dú)執(zhí)行,如開(kāi)關(guān)模、射膠、座臺(tái)動(dòng)作以及托模動(dòng)作等。在半自動(dòng)模式下,注塑機(jī)在控制器的控制下動(dòng)作1個(gè)循環(huán),即生產(chǎn)出1件制品,如果需要進(jìn)行下一個(gè)循環(huán),則只要打開(kāi)在關(guān)閉安全門(mén)1次即可。全自動(dòng)模式提供2種方式:一種是時(shí)間自動(dòng)方式;另一種是電眼自動(dòng)方式,前者是以計(jì)時(shí)方式來(lái)判斷制品的取出,其計(jì)時(shí)是從最后一次托模退動(dòng)作終止的時(shí)刻開(kāi)始,該時(shí)間可以設(shè)定,只要時(shí)間一到,注塑機(jī)立即進(jìn)入下一個(gè)循環(huán),而后者是根據(jù)電眼來(lái)檢測(cè)制品是否脫落,如果檢測(cè)到則立即進(jìn)入下一個(gè)循環(huán),如果在規(guī)定時(shí)間內(nèi)沒(méi)有檢測(cè)到制品落下,則進(jìn)行報(bào)警。
從機(jī)軟件設(shè)計(jì)的重點(diǎn)是溫度控制模塊,也是本文介紹的重點(diǎn)。溫度控制是注塑機(jī)必要的環(huán)節(jié),其控制性能直接影響產(chǎn)品的質(zhì)量。它包括溫度檢測(cè)和加熱器控制兩個(gè)方面。控制器采用模糊控制和常規(guī)PID控制相結(jié)合的控制算法,并且可以根據(jù)實(shí)際需要設(shè)置成不使用模糊控制或PID控制,此時(shí)溫度控制就按時(shí)間周期方式進(jìn)行,即通過(guò)設(shè)定加熱的時(shí)間周期和溫控百分比進(jìn)行溫度控制。
根據(jù)模糊控制理論,當(dāng)論域?yàn)殡x散時(shí),經(jīng)過(guò)量化后的輸入量的個(gè)數(shù)是有限的。因此可以針對(duì)輸入的不同組合離線計(jì)算出相應(yīng)的控制量,從而組成一張控制表,實(shí)際控制時(shí)只要直接查這張控制表即可。在ARM處理器中如何實(shí)現(xiàn)控制規(guī)則表是整個(gè)系統(tǒng)的關(guān)鍵所在。本系統(tǒng)采用二維矩陣形式存儲(chǔ)控制規(guī)則表,例如定義二維矩陣為fuzzyctrl[13][13]。因輸入量偏差E和偏差變化率DE量化后分別為x,y,且x,y={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},則在ARM中可以將其與a,b={0,1,2,3,4,5,6,7,8,9,10,11,12}一一對(duì)應(yīng)。例如,假設(shè)E量化后為x=-2,y=3,則在ARM中對(duì)應(yīng)a=4,b=9,查表時(shí)只需查fuzzyctrl[4][9],這樣表示無(wú)論從數(shù)據(jù)管理還是從查表方便而言,都具有極大的優(yōu)勢(shì)。這種離線計(jì)算、在線查表的模糊控制方法比較容易滿足實(shí)時(shí)控制的要求。
另外,控制器還結(jié)合了傳統(tǒng)的PID控制方法。軟件判斷偏差e的大小范圍,當(dāng)e>+6℃或e<-6℃時(shí),系統(tǒng)將自動(dòng)切換到PID控制程序段,使系統(tǒng)能快速響應(yīng);當(dāng)-6℃
4 結(jié)語(yǔ)
采用雙處理器對(duì)整個(gè)控制任務(wù)進(jìn)行合理分割,不僅提高了系統(tǒng)的處理速度和穩(wěn)定性,而且軟件設(shè)計(jì)也相對(duì)簡(jiǎn)單。處理器結(jié)合位移傳感器,并按一定的壓力和速度對(duì)注塑機(jī)實(shí)施控制和動(dòng)態(tài)監(jiān)測(cè),大大提高了產(chǎn)品的精度和質(zhì)量。料筒溫度控制采用模糊控制結(jié)合傳統(tǒng)控制方法PID控制,使溫度控制達(dá)到更好的控制效果。該控制器件已在實(shí)際生產(chǎn)中獲得了應(yīng)用,經(jīng)過(guò)半年多的使用,系統(tǒng)運(yùn)行情況良好、性能穩(wěn)定。