
摘要:介紹了基于MAD2020E型加速度計的0°~360°傾角傳感器的基本原理,,并結合實際加速度傳感的特性,,采用雙軸無溫度補償方法進行了硬件和軟件的設計。實驗驗證該傾角加速度傳感器實現(xiàn)了外形小巧,、精度高,、智能化。
關鍵詞:加速度傳感器,;傾角測量,;無溫度補償;MAD2020E
1 引言
目前國內現(xiàn)場使用的傾角傳感器大多應用于系統(tǒng)水平測量,。傾角傳感器從工作原理上可分為“同體擺”,、“液體擺”、“氣體擺”,、“加速度”4種方式,。多數(shù)為偏重框架結構式的測角傳感器,其工藝精度低,、可靠性差,,而新的石英撓性加速度計雖測量精度高,但抗震性能差,,易損壞,。MEMSIC加速度計MAD2020E不僅外形小巧、精度高,、而且耐沖擊較大,,特別適合礦井、機車等測量傾角條件較惡劣的場合,。因此,,這里提出一種基于MAD2020E加速度計0°~360°傾角傳感器設計方案。
2 測傾角工作原理
2.1 加速度計測傾角工作原理
加速度計通過感知重力加速度g在其測量軸上分量的大小確定物體的傾斜角度,。當MEMSIC加速度計水平放置時(兩個靈敏軸與水平面平行),,它對位置或傾角變化最為敏感。而當垂直放置時(兩個靈敏軸與水平面垂直),,對于位置或傾角變化的敏感度將下降,。圖1與圖2描述了MEMSIC加速度計從+90°~O°傾斜過程中X軸和y軸輸出值的相應變化。請注意當任意一軸(每傾斜1°)的輸出變化較小時,,則另一軸的輸出變化較大,。利用這兩軸的變化特性相互彌補的原理設計精度較高的傾角傳感器。
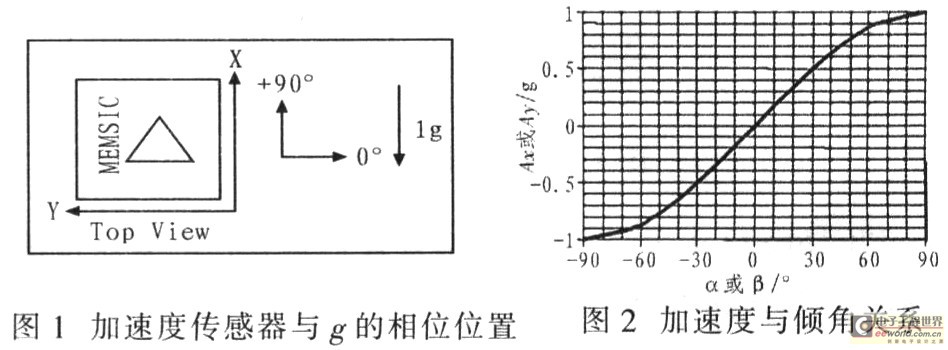
為測傾斜角度,需要進行計算,,因為加速度計的輸出僅僅作用在感應軸上的重力加速度值,。雙軸加速度計水平放置時的輸出和重力之間的關系:

式中,Ax和Ay代表加速度計的輸出,,g是重力加速度,,α和β是傾斜角度。為了計算傾斜角度,,由反正弦方程:

2.2 MAD2020E型加速度計簡介
MAD2020E型加速度計是基于單片COMS 工藝的一個完整的雙軸加速度測量系統(tǒng),,像其他加速度計有重力塊一樣,MEMSIC器件是以可移動的熱對流小氣團作為重力塊,。該器件通過測量由加速度引起的內部溫度的變化來測量加速度,。MEMSIC傳感器中的質量塊是氣體。MAD2020E型加速度計是通過測量溫度變化的原理確定加速度的裝置,。MAD2020E型加速度計傳感器輸出信號是2個PWM(占空比)信號,當加速度計傳感器輸出 PWM信號時,,PWM信號的占空比與加速度信號成比例,。
3 無溫度補償雙軸0°~360°傾角傳感器設計
3.1 系統(tǒng)總體設計
在基于水平位置的傾斜角度不超過±60°的應用中,可使用一個雙軸加速度傳感器來測量兩軸上的傾斜,。當需要測量大于90°的傾斜角時,,加速度計的X和Y軸相結合得到在360°范圍內較好的分辨率。這需要一個雙軸的加速度計傳感器來測量單軸傾斜角,。圖3給
出一個基于垂直初始位置的加速度傾角計,,豎角放置的單軸傾斜測量,±360°良好分辨率,。
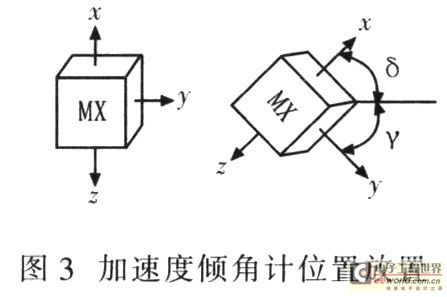
時,,加速度和傾斜角之間的關系:

這里,(δ+γ)=90°,,可容易得到δ或γ的值,。因此,Ax也可寫成:Ax=g·sin(-γ+90°)=g·cos(γ),。γ可通過反正切方程求得:γ=tan-1(Ax/Ay),。
除了提供更好的傾斜角分辨率外,垂直構架還提供兩個輸出誤差由Ay除以Ax相抵消,。故執(zhí)行這個轉換過程后,,就不用對加速度計進行溫度補償。因為熱電耦加速度傳感器的靈敏度具有可重復的溫度特性,,兩軸的輸出變化幅度相同,,所以靈敏度隨溫度的變化對比值的計算沒有影響。
無溫度補償雙軸傾角傳感器系統(tǒng)設計是基于以上原理,,以PIC16F873單片機為核心的雙軸PWM輸入,,并利用預先設置零點偏值的方法來補償零點溫度漂移的思想設計而成,。其溫度補償雙軸傾角傳感器系統(tǒng)硬件原理圖如圖4所示。
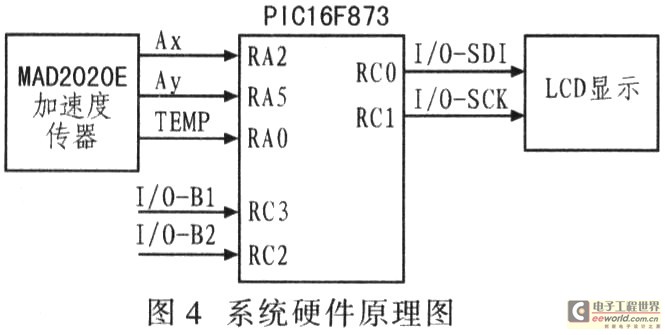
PIC16F873的RC3和RC2端設置選擇和校準零點按鍵,,當PIC16F873讀入時,,通過按鍵的循環(huán)選擇進行0 g的校準和靈敏度的校準。
MAD2020E型加速度計傳感器輸出是2個PWM(占空比):T1/(T1+T2),,則加速度輸出為:
![]()
PIC16F873中有3個定時器,,利用time1可計算PWM高低脈沖寬度的時間。
由MEMIC加速度計輸入與輸出的關系,,信號的輸出表達關系式:
AOUT(α)=AOUT(0)+SENSITIVITY×SIN(α) (5)
O°~360°傾角實現(xiàn)方法是先把MEMIC加速度計垂直放置,,然后在調整可得AOUT(0),后利用ARCTAN函數(shù):
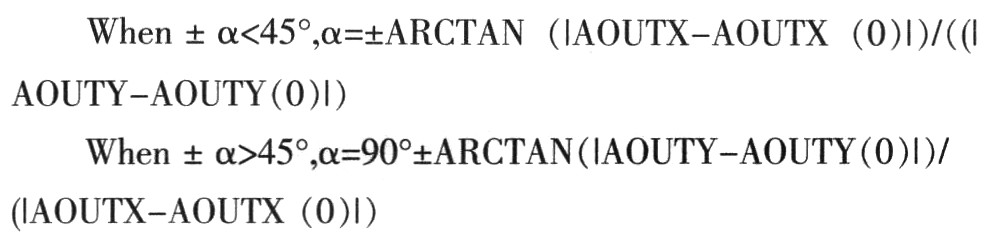
該方法無需溫度補償,。0 g校準是通過預先設定一個偏置角度(AngleOffset)來實現(xiàn),,然后每次把偏置角度與AOUTX相加,就可完成0 g校準,。
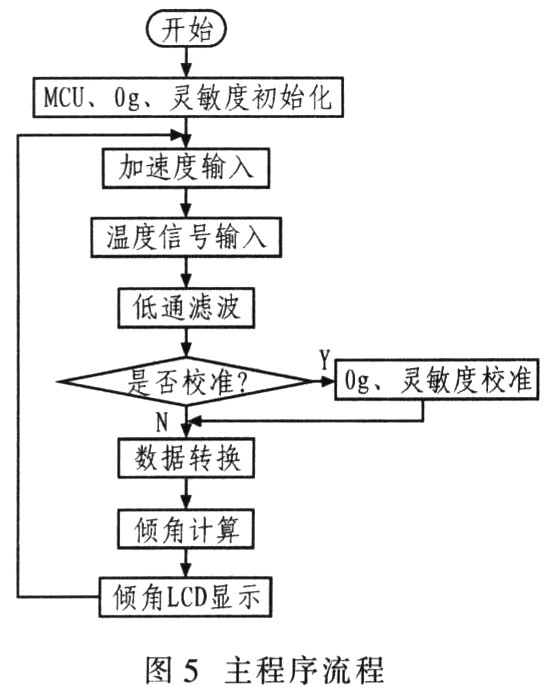
而系統(tǒng)軟件主程序流程如圖5所示,。
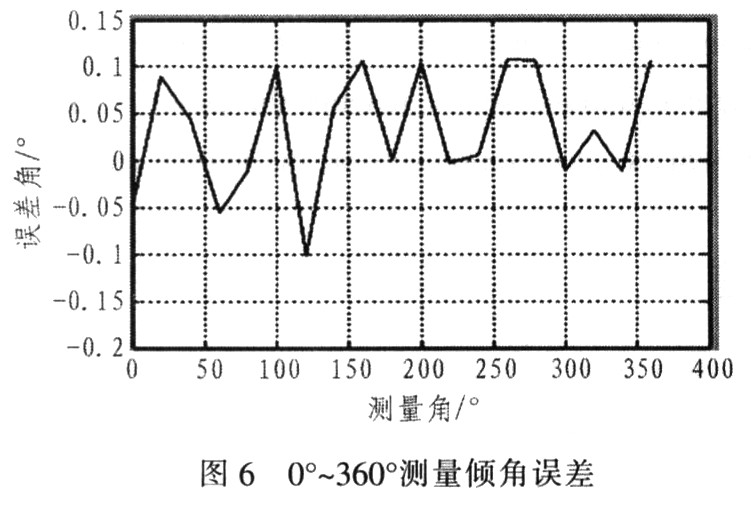
3.2 實驗結果
按上述傾角測量原理及電路設計,在實際轉角測試平臺上進行數(shù)據(jù)測量,,測量角度誤差如圖6所示,,測量誤差結果的不大于±0.1°,實驗證明測量傾角的方法具有良好的精度,,從而實現(xiàn)了無溫度補償?shù)碾p軸0°~360°傾角的測量,。
4 結論
采用PIC16F873單片機的加速度傾角傳感器設計,巧妙利用熱電耦式MEMSIC加速度計MAD2020E傳感器的靈敏度具有可重復的溫度特性,,兩個軸的輸出都是相同的變化幅度,,反正切的運算剔除了靈敏度的誤差,同時0 g的偏差利用預先設定好的角度偏置來實現(xiàn),,從而避免零點漂移造成的角度測量誤差,,實現(xiàn)了無溫度補償?shù)碾p軸加速度0°~360°傾角高精度、智能化的測量,。