
1 引言
微加速度計是MEMS(Micro Electromeclaanical System)的一個重要分支,在航空航天、汽車、國防等領(lǐng)域有著廣泛應(yīng)用。高g值加速度傳感器作為一次儀表被廣泛應(yīng)用于撞擊及高速運動過程中高過載測量,在深侵徹武器設(shè)計中,它可用于識別目標(biāo),也可用于測量飛機抗墜毀實驗中和汽車碰撞試驗中的過載川。高g值加速度傳感器靈敏度系數(shù)的精度直接影響測量精度。由于高g值加速度傳感器在很多場合都可以重復(fù)使用,在使用過程中,由于所承受高過載作用,其靈敏度系數(shù)可能發(fā)生變化,需經(jīng)常校準(zhǔn)。因此高g值加速度傳感器靈敏度的測量不僅在研制高g值加速度傳感器中扮演著重要角色,而且在抗高過載測量中起著重要作用。主要介紹微型霍普金森(Hopkinson)桿技術(shù),采用激光多普勒原理,用衍射光柵做合作目標(biāo),使用調(diào)頻信號的一種數(shù)字化解調(diào)方法實現(xiàn)多普勒頻移數(shù)據(jù)處理,時間分辨率為一個采樣間隔。該技術(shù)具有魯棒性好、過程收斂、結(jié)果精確等特點。應(yīng)用滑動最小二乘擬合直線段的方法實現(xiàn)微分運算,獲得沖擊速度和加速度的瞬時測量值,并給出實驗結(jié)果。
2 加速度傳感器校準(zhǔn)裝置及工作過程
圖1為高g值加速度沖擊傳感器校準(zhǔn)裝置,是由Hop-kinson桿、差動式激光多普勒干涉儀、數(shù)字示波器和計算機系統(tǒng)組成。
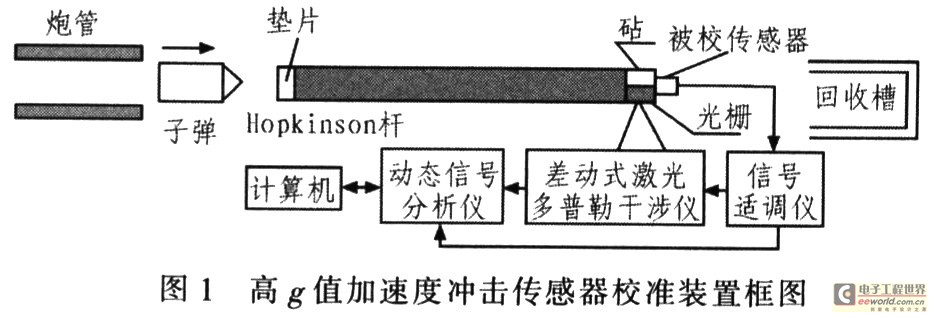
霍普金森(Hopkinson)激光干涉沖擊試驗臺是加速度傳感器沖擊標(biāo)準(zhǔn)專用差動激光多普勒測速儀和小型空氣炮加載系統(tǒng),主要用于高g值測量,使用 Hopkinson棒,在桿中產(chǎn)生應(yīng)力波,在距離端面幾倍棒直徑處,應(yīng)力波的波振面實際上變成平面波,只要棒的長度與直徑之比充分大,用Hop- kinson沖擊機,在校準(zhǔn)端面可獲得波形良好及橫向運動很小的沖擊過程。差動式激光多普勒測速儀是測量通過激光探頭示蹤粒子的多普勒信號,再根據(jù)速度與多普勒頻率的關(guān)系得到速度。由于是激光測量,對于流場沒有干擾.測速范圍寬,而且由于多普勒頻率與速度是線性關(guān)系。和該點的溫度、壓力沒有關(guān)系,是目前世界上速度測量精度最高的儀器,其工作過程如圖1所示,使用Hopkinson沖擊機對Hopkinson棒發(fā)射彈體,產(chǎn)生沖擊加速度,同時作用于光柵和被測加速度傳感器,被測加速度傳感器測得的信號經(jīng)信號適調(diào)儀后被動態(tài)信號分析儀采集,光柵位移經(jīng)多普勒激光干涉儀產(chǎn)生具有多普勒效應(yīng)的調(diào)頻信號,該信號被數(shù)字示波器采集,對該調(diào)頻信號進行頻率解調(diào)后,可獲得作用于加速度傳感器的加速度值。
3 高g值沖擊加速度傳感器校準(zhǔn)原理
激光多普勒一次沖擊校準(zhǔn)法采用激光多普勒原理,用衍射光柵做合作目標(biāo),絕對復(fù)現(xiàn)沖擊加速度量值,并校準(zhǔn)加速度計。反射式衍射光柵產(chǎn)生的多普勒頻移為:
![]()
式中,ψ為入射角,θ為衍射角,v為光柵平面的速度,λ為激光波長。
雙入射光光柵產(chǎn)生的多普勒頻移為:

式中,ψ為入射角,v為光柵平面速度,λ為激光波長。
根據(jù)式(2)得到?jīng)_擊速度v(t):
![]()
將式(3)微分得到?jīng)_擊加速度a(t):

式(4)取峰值得到?jīng)_擊加速度峰值aP。絕對復(fù)現(xiàn)的沖擊加速度峰值ap作為參考量值,與被校加速度計輸出的電量峰值VP作比較,得被校加速度計的沖擊校準(zhǔn)靈敏度:

另外,利用多普勒信號測得的速度改變量和加速度計輸出波形所包絡(luò)的面積也可確定被校加速度計的靈敏度。該靈敏度定義為:
式中,Us為加速度計的輸出電壓;a為加速度;g為標(biāo)準(zhǔn)重力對于碰撞過程,僅在t1-t2時間內(nèi)存在加速度,也就是說在t1-t2時間內(nèi)加速度計的運動速度從0增加到u,則式(6)可改寫為:

式(6)兩邊除以A得到:
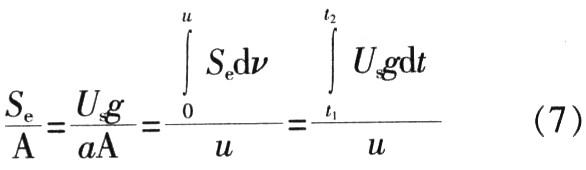
式中,
則時間間隔t1-t2內(nèi)加速度計的平均靈敏度為:

由式(8)可看出:要確定Se需要測得 由式(6)可知
由式(6)可知![]() 可由對被校準(zhǔn)加速度計的輸出進行積分得到,而
可由對被校準(zhǔn)加速度計的輸出進行積分得到,而![]() 則是由激光多普勒信號解析得到的速度。
則是由激光多普勒信號解析得到的速度。
4 實驗數(shù)據(jù)及結(jié)果處理
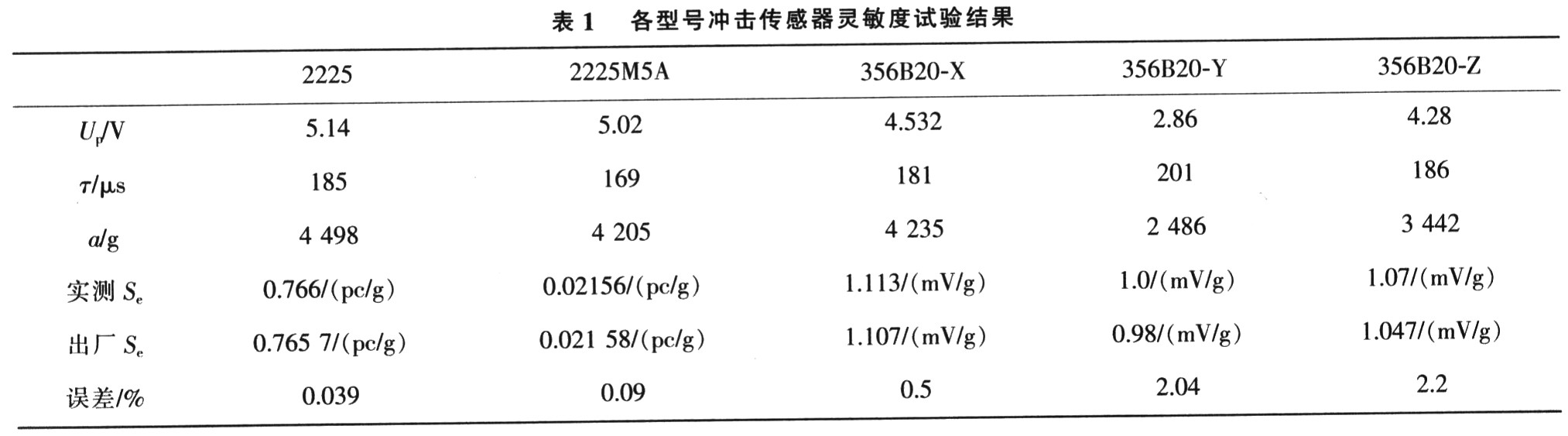
對ENDEVCO公司生產(chǎn)的2225,2225M5A型、PCB公司生產(chǎn)的356820型加速度傳感器進行靈敏度測試試驗。試驗結(jié)果如表1所示。
使用2225型沖擊傳感器和IM133電荷放大器做試驗得圖2~圖5的曲線波形。被測傳感器經(jīng)電荷發(fā)生器歸一化處理,輸出刻度為1 mV/g。圖2為實際試驗獲得的沖擊過程中激光多普勒干涉信號,選擇多普勒信號的開始點,去掉開始部分的不正常信號。該沖擊校準(zhǔn)裝置中,濾波截止頻率= 54 kHz,激光波長K=0.632 99 μm;激光干涉中使用二級衍射條紋,p=2;q=-2;光柵柵距d=1/150 mm。沖擊過程中的激光多普勒干涉信號經(jīng)計算,可得到?jīng)_擊速度曲線,由式(3)獲得圖3所示的沖擊速度波形曲線,最大速度v=5.33 m/s;由式(4)獲得圖4所示沖擊加速度波形曲線,其峰值加速度g=4 497.533 7 m/s2,脈寬T=185μs,圖5為沖擊過程中加速度傳感器輸出波形曲線,截取有用信號,從該圖可得其峰值VP=5.13 V,由式(6)可得被校加速度傳感器的沖擊校準(zhǔn)靈敏度Sch=1.14 mv/g。由式(8)可得被測加速度傳感器的平均靈敏度:Se=0.766 pc/g。
Hopkinson桿是校準(zhǔn)高g值加速度傳感器很好的實驗裝置,通過差動式激光多普勒測速儀,可以對沖擊傳感器在高g值段進行靈敏度校準(zhǔn)實驗。 ENDEVCO的2225、2225M5A型沖擊傳感器的靈敏度吻合較好,與各沖擊傳感器出廠靈敏度相比,誤差小于0.1%,356820型傳感器是3軸向沖擊傳感器,X軸的誤差較小而另外兩個軸向靈敏度誤差偏大。
5 結(jié)論
本文所使用的沖擊加速度校準(zhǔn)方法,是目前原理最完善、最可靠的激光多普勒沖擊校準(zhǔn)方法,實現(xiàn)了絕對復(fù)現(xiàn)沖擊加速度量值,采用光柵差動式激光干涉儀,實現(xiàn)沖擊加速度的精確測量。為高g值加速度傳感器的反復(fù)使用提供一種比較準(zhǔn)確的參考標(biāo)準(zhǔn)。