
0 引 言
靶機(jī)是無人機(jī)家族中的一個(gè)重要分支,主要用于模擬作戰(zhàn)飛機(jī)、導(dǎo)彈等威脅目標(biāo),為防空武器系統(tǒng)試驗(yàn)和訓(xùn)練提供逼真的空中靶標(biāo)。隨著技術(shù)的進(jìn)步,現(xiàn)代反艦導(dǎo)彈多采取“超低空掠海”飛行的突防方式,與之相應(yīng)的用于模擬反艦導(dǎo)彈類目標(biāo)的無人靶機(jī)也需要具有超低空掠海飛行能力。20世紀(jì)60年代,以美國為代表的西方發(fā)達(dá)國家推出了第一代具有超低空掠海定高飛行能力的靶機(jī),之后迅速形成了系列化,并隨著新技術(shù)的應(yīng)用不斷升級(jí)換代,某些經(jīng)典型號(hào)至今仍在廣泛使用,如石雞、火蜂、米拉奇等系列靶機(jī),其掠海飛行的相對(duì)高度均達(dá)到了5 m以下。國內(nèi)在這一領(lǐng)域則起步較晚。飛行控制系統(tǒng)是無人機(jī)的“大腦”,無人機(jī)的超低空掠海飛行主要是在飛控系統(tǒng)高度控制器的控制下實(shí)現(xiàn)的。因此,本文針對(duì)小型靶機(jī)飛控系統(tǒng)的研制,基于無線電高度表/加速度計(jì)組合控制的基本原理,采用Kalman濾波信號(hào)處理方法和基于ARM7微處理器的嵌入式系統(tǒng),設(shè)計(jì)了一種簡單實(shí)用的高度控制器,能夠?qū)Π袡C(jī)飛行高度進(jìn)行精確控制,從而實(shí)現(xiàn)超低空掠海定高飛行的目的。
1 飛控系統(tǒng)配置與高度控制原理
靶機(jī)飛控系統(tǒng)由傳感器、飛控計(jì)算機(jī)和執(zhí)行機(jī)構(gòu)3個(gè)部分組成。傳感器主要包括垂直陀螺、兩軸角速率陀螺、三軸捷聯(lián)式磁航向傳感器、無線電高度表、垂向加速度計(jì)、空速管、GPS接收機(jī)、發(fā)動(dòng)機(jī)溫度和轉(zhuǎn)速傳感器等;飛控計(jì)算機(jī)是飛控系統(tǒng)的核心部件,是一臺(tái)基于ARM7的嵌入式計(jì)算機(jī),接收來自各傳感器的測量信息,并根據(jù)控制律進(jìn)行解算,給出控制信號(hào)驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)動(dòng)作;執(zhí)行機(jī)構(gòu)主要包括升降舵機(jī)、副翼舵機(jī)、舵回路控制器、發(fā)動(dòng)機(jī)油門電機(jī)和ECU控制器。飛控系統(tǒng)組成如圖1所示。

高度控制器主要由內(nèi)、外兩個(gè)反饋控制回路構(gòu)成。首先是以垂直陀螺和角速率陀螺測量信號(hào)作為反饋控制信號(hào)構(gòu)成靶機(jī)姿態(tài)控制內(nèi)回路(角運(yùn)動(dòng)控制系統(tǒng)),包括橫向、縱向兩個(gè)控制通道,是系統(tǒng)的核心控制回路。由于姿態(tài)控制系統(tǒng)在常值干擾力矩(如垂風(fēng))的干擾下存在姿態(tài)角靜差,會(huì)導(dǎo)致高度漂移,不能直接應(yīng)用于高度軌跡的穩(wěn)定與控制,因此在高度控制系統(tǒng)中需要直接測量飛機(jī)高度和垂向運(yùn)動(dòng)速度等線運(yùn)動(dòng)信息,使用高度表和線加速度計(jì)等傳感器,在姿態(tài)控制系統(tǒng)基礎(chǔ)上建立高度控制外回路,兩者共同構(gòu)成完整的高度控制系統(tǒng)(圖1中陰影部分)。在超低空飛行時(shí)要使用高精度的高度傳感器,通常采用無線電高度表。在該系統(tǒng)的實(shí)際設(shè)計(jì)中,采取了無線電高度表和線加速度計(jì)組合控制,即對(duì)無線電高度表和垂向線加速度計(jì)測量信息進(jìn)行特定算法綜合處理后,得到靶機(jī)高度和垂向速度的兩路反饋控制信號(hào),送到縱向姿態(tài)控制通道,形成高度控制外回路,與姿態(tài)控制內(nèi)回路共同完成高度控制功能。
2 高度控制律設(shè)計(jì)
2.1 基本控制律設(shè)計(jì)
為了減少設(shè)計(jì)風(fēng)險(xiǎn),高度控制律采用經(jīng)典的比例一微分(PD)控制。
其時(shí)域表示為:

其控制原理如圖2所示。
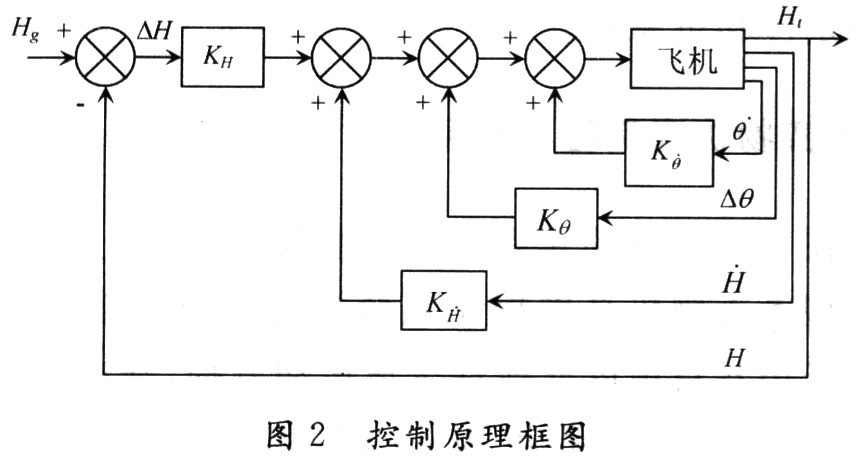
控制量由四部分組成,包括姿態(tài)控制內(nèi)回路和高度控制外回路的各兩個(gè)控制量。姿態(tài)控制內(nèi)回路:與俯仰角偏差△θ成正比的比例控制器作為主控制對(duì)俯仰角進(jìn)行修正,與俯仰角速率θ成正比的微分控制器主要用于改善姿態(tài)內(nèi)回路的阻尼特性。
高度控制外回路:與高度差△H成正比的比例控制器作為主控制對(duì)高度進(jìn)行修正,與垂向速度冉成正比的微分控制器則主要用于改善高度外回路的阻尼特性。
2.2 信號(hào)處理方法及效果分析
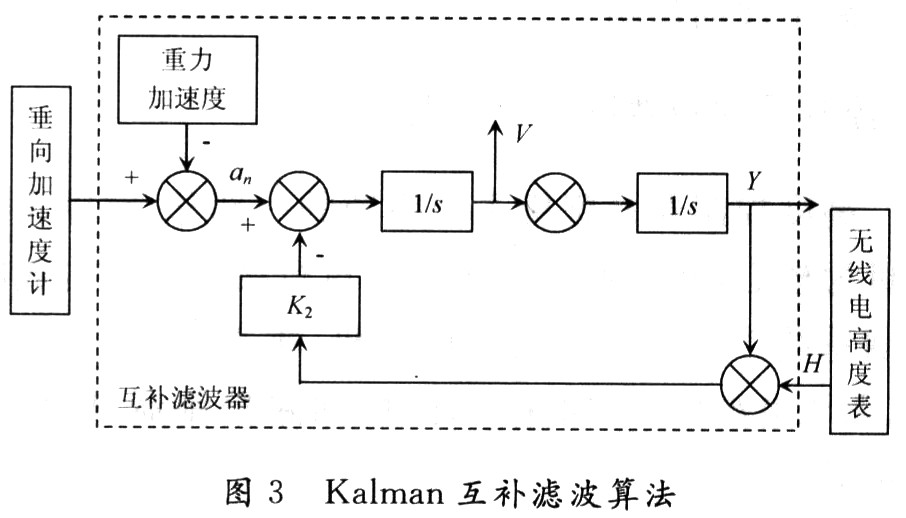
在基本控制律確定后,一個(gè)必須解決好的主要問題就是如何獲取高質(zhì)量的反饋控制信號(hào)。俯仰角偏差△θ與俯仰角速率θ,按常規(guī)做法可分別由垂直陀螺和角速率陀螺提供滿足精度要求的信號(hào)。這里主要問題在于高度信號(hào)H和垂向速度信號(hào)H的獲取和處理。無線電高度表信號(hào)由于海浪起伏等因素的影響本身含有大量的噪聲,并且如果直接采用高度表信號(hào)微分獲取垂向速度信號(hào),會(huì)引起系統(tǒng)不穩(wěn)定,不能單獨(dú)使用;如果采用加速度計(jì)信號(hào)積分獲取垂向速度信號(hào)和高度信號(hào),又存在誤差累積的問題,也不能單獨(dú)使用。然而如果將兩者組合使用,則可以產(chǎn)生很好的優(yōu)勢互補(bǔ)效果。所以,本文采用了一種Kalman互補(bǔ)濾波算法,既可濾除高度信號(hào)噪聲,又可獲得高質(zhì)量的垂向速度信號(hào)。其設(shè)計(jì)思想是通過對(duì)垂向加速度信號(hào)進(jìn)行積分得到垂向速度,再對(duì)垂向速度積分得到高度,將此高度與高度表的實(shí)際測量高度進(jìn)行比較,得到一個(gè)偏差量。把該偏差量作為當(dāng)前時(shí)刻的誤差估計(jì)值重新加入到垂直加速度和垂直速度上繼續(xù)進(jìn)行濾波運(yùn)算。高度信號(hào)與垂向加速度信號(hào)互補(bǔ)濾波的原理如圖3所示。
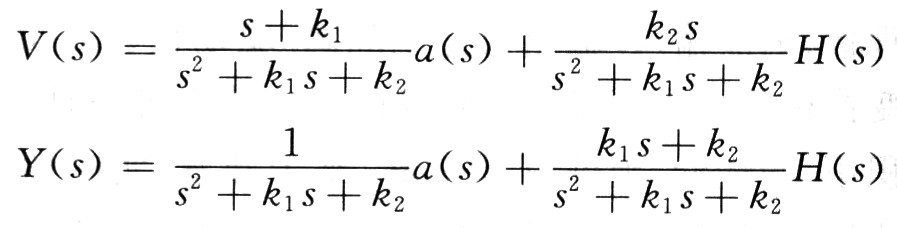
再對(duì)該濾波算法的效果進(jìn)行分析。設(shè)拖靶的實(shí)際高度為Hr,記a=Hr+Na,其中Na表示加速度的誤差,則有:

記H=Hr+Nh,Nh表示高度的誤差,則有:
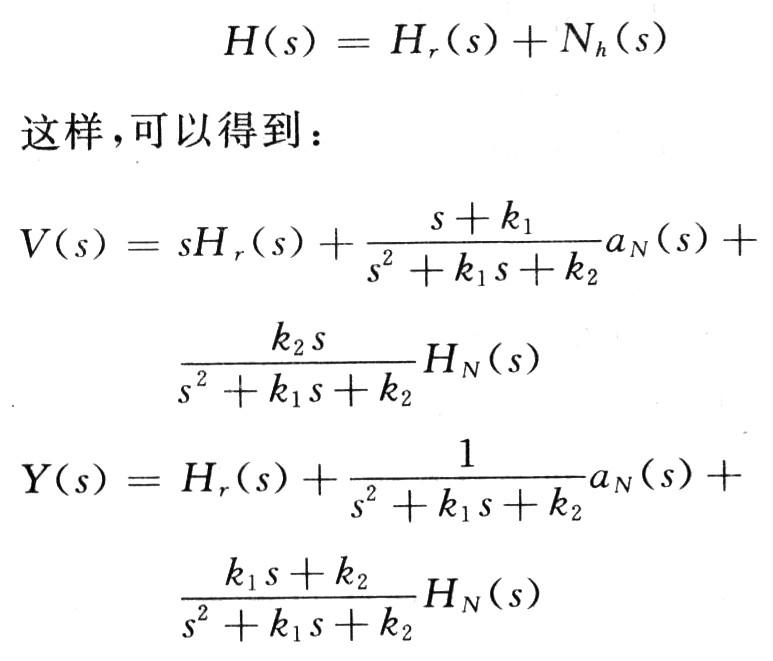
從上面可以看出,解算后的速度V由三個(gè)部分組成:
真實(shí)高度的微分:sHr(s)
這樣得到的垂向速度和高度信號(hào)中,加速度誤差和高度誤差的信號(hào)能夠被有效地濾波,特別是能夠有效地去除海雜波的影響。
3 控制器軟硬件設(shè)計(jì)與實(shí)現(xiàn)
高度控制器是靶機(jī)飛控系統(tǒng)的一部分,它以飛控計(jì)算機(jī)為核心,并與各路傳感器及執(zhí)行結(jié)構(gòu)共同構(gòu)成閉環(huán)控制系統(tǒng)。主要由飛控計(jì)算機(jī)、垂直陀螺、角速率陀螺、無線電高度表、加速度計(jì)、舵回路控制器、舵機(jī)等設(shè)備組成。
(1)飛控計(jì)算機(jī)
飛控計(jì)算機(jī)包括主機(jī)板、A/D轉(zhuǎn)換板、串行數(shù)據(jù)通訊接口板、開關(guān)量接口板、D/A轉(zhuǎn)換板、模擬輸入前置處理板、離散輸入/輸出及光電隔離/驅(qū)動(dòng)板、DC/DC電源變換板等。采用基于ARM的嵌入式系統(tǒng)設(shè)計(jì),具有體積小,功耗低,硬件資源豐富,易于開發(fā),實(shí)時(shí)性和可靠性好等優(yōu)勢。主機(jī)板處理器選用ARM7TDMS-S體系結(jié)構(gòu)的32位LPC2124芯片,其16 KB的內(nèi)部RAM以及128 KB的內(nèi)部FLASH存儲(chǔ)器,可很好地滿足嵌入式實(shí)時(shí)操作系統(tǒng)RTOS(μC/OS-Ⅱ)的運(yùn)行要求,保證系統(tǒng)每20 ms能進(jìn)行一次高度控制律解算。
(2)垂直陀螺
選用TC-3E型垂直陀螺儀,在高度控制回路中主要用于測量飛機(jī)俯仰角姿態(tài),工作范圍俯仰角為±30°,輸出模擬電壓信號(hào)。
(3)角速率陀螺
選用2軸角速率陀螺,在高度控制回路中主要用于測量飛機(jī)俯仰姿態(tài)角速度,俯仰角速度輸出范圍為±60°/s,輸出模擬電壓信號(hào)。
(4)無線電高度表
采用調(diào)頻/連續(xù)波(FM/CW)體制,工作頻率為4 200~4 400 MHz,測高范圍為0~300 m,高度輸出形式為:RS 232串口輸出,波特率為38 400 b/s,更新率為50 Hz。
(5)加速度計(jì)
加速度計(jì)安裝在靶機(jī)的重心位置,用于測量拖靶的垂直方向加速度,選用ADXL105AQC加速度計(jì)芯片,精度為±1~±5 g,單通道模擬輸出,分辨率2 mg。
(6)舵回路控制器
基于PWM直流電機(jī)驅(qū)動(dòng)器專用集成電路L292設(shè)計(jì)。包括位置調(diào)節(jié)器、電流調(diào)節(jié)器、PWM功放、位置反饋和電流反饋傳感器。位置反饋為主反饋回路,采用WDL-25直滑式精密導(dǎo)電塑料電位器;電流反饋采用標(biāo)準(zhǔn)電阻。
(7)升降舵機(jī)
采用齒輪減速永磁直流力矩電機(jī),額定轉(zhuǎn)矩15 Nm,額定轉(zhuǎn)速(減速后)4±1 r/min。
(8)軟件設(shè)計(jì)
基于嵌入式實(shí)時(shí)多任務(wù)操作系統(tǒng)μC/OS-Ⅱ下編寫應(yīng)用程序,具有可移植、裁剪、多任務(wù)和基于優(yōu)先級(jí)的搶占式任務(wù)調(diào)度等特點(diǎn),實(shí)時(shí)性好,可靠性高。使用實(shí)時(shí)操作系統(tǒng)(RTOS)是因?yàn)榭蓪?yīng)用分解成多任務(wù),簡化了應(yīng)用軟件的設(shè)計(jì),同時(shí)RTOS使控制系統(tǒng)的實(shí)時(shí)性得到保證;良好的多任務(wù)設(shè)計(jì),又有助于提高系統(tǒng)的穩(wěn)定性和可靠性。
4 半實(shí)物仿真實(shí)驗(yàn)與結(jié)果
在自行搭建的無人機(jī)半實(shí)物仿真平臺(tái)上,對(duì)所開發(fā)的小型無人靶機(jī)高度控制系統(tǒng)進(jìn)行了仿真驗(yàn)證。飛機(jī)模型采用六自由度非線性全量運(yùn)動(dòng)方程,基本仿真步長為5 ms,仿真計(jì)算精度為64 b(雙精度浮點(diǎn))。仿真系統(tǒng)包括在三軸轉(zhuǎn)臺(tái)上的垂直陀螺、角速率陀螺,與動(dòng)靜壓模擬器連接的空速傳感器,而無線電高度表信號(hào)、加速度計(jì)信號(hào)則通過計(jì)算機(jī)模擬,再接人高度控制計(jì)算機(jī)、舵機(jī)等構(gòu)成仿真回路。仿真結(jié)果如圖4和圖5所示,本文給出了兩種主要干擾條件下的結(jié)果。
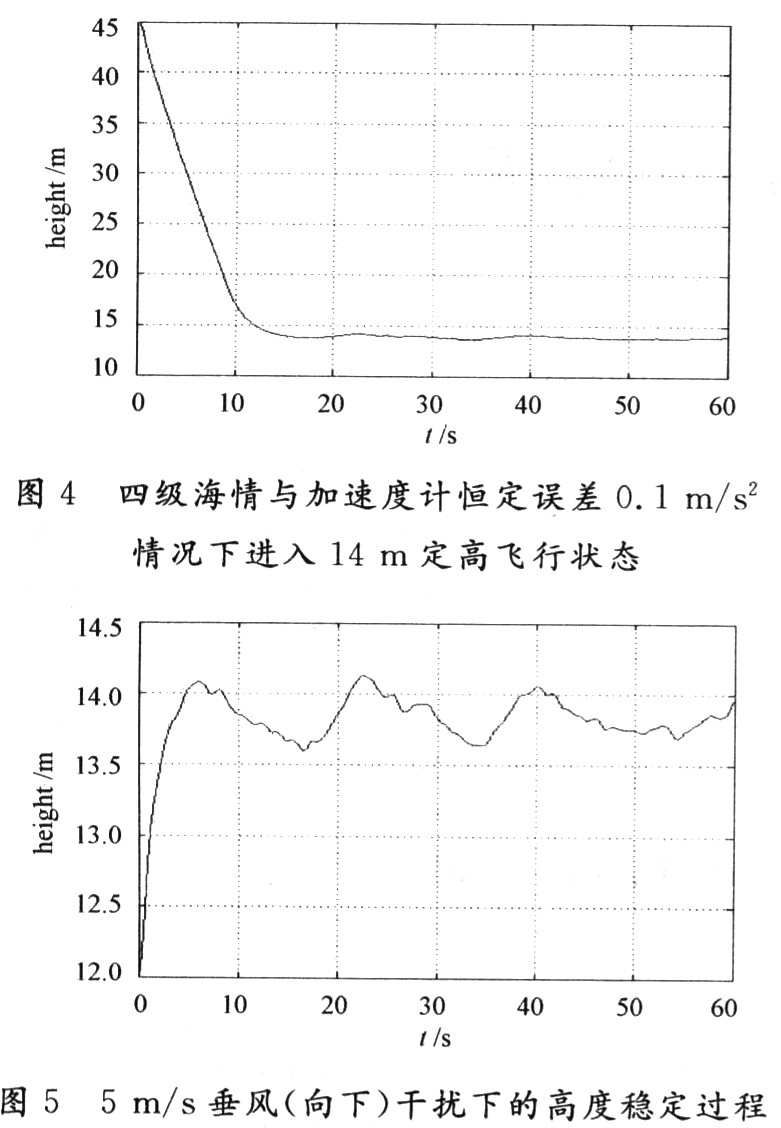
仿真結(jié)果表明,在4級(jí)海情產(chǎn)生高度表噪聲影響和加速度計(jì)測量誤差影響的情況下,系統(tǒng)能夠控制靶機(jī)平穩(wěn)進(jìn)入14 m定高飛行狀態(tài),并按精度要求保持在預(yù)定高度飛行。在5 m/s垂風(fēng)干擾下,靶機(jī)能夠很快回到預(yù)定的14 m基準(zhǔn)高度。可見系統(tǒng)靜動(dòng)態(tài)響應(yīng)指標(biāo)能滿足設(shè)計(jì)要求。
5 結(jié) 語
本文基于無線電高度表/加速度計(jì)組合控制模式,采用成熟的比例一微分(PD)控制原理,Kalman互補(bǔ)濾波的信號(hào)處理方法,以及基于ARM的硬件實(shí)現(xiàn)和μC/OS-Ⅱ嵌入式實(shí)時(shí)操作系統(tǒng)的軟件開發(fā),設(shè)計(jì)了小型靶機(jī)超低空掠海飛行高度控制器,其結(jié)構(gòu)簡單緊湊,原理可行。半實(shí)物仿真實(shí)驗(yàn)結(jié)果表明,系統(tǒng)具有良好的靜、動(dòng)態(tài)響應(yīng)特性,完全能夠?qū)崿F(xiàn)對(duì)靶機(jī)超低空高精度掠海定高飛行的控制,系統(tǒng)設(shè)計(jì)和軟硬件實(shí)現(xiàn)都是成功的。