
1 引言
導(dǎo)彈在大攻角飛行過程中,通道間存在嚴(yán)重的氣動(dòng)耦合。工程設(shè)計(jì)上,通常把較小的耦合項(xiàng)作為隨機(jī)干擾來處理,但當(dāng)耦合影響較大時(shí),容易使控制系統(tǒng)喪失穩(wěn)定性,因此必須考慮通道間的耦合效應(yīng),并對其解耦。近年來,隨著控制理論的發(fā)展,多種解耦控制方法應(yīng)運(yùn)而生,如特征結(jié)構(gòu)配置解耦、自校正解耦、線性二次型解耦、奇異攝動(dòng)解耦、自適應(yīng)解耦、智能解耦、H∞解耦,變結(jié)構(gòu)解耦等,其中文獻(xiàn)[4]采用多變量頻域法,將耦合的MIMO系統(tǒng)化為一系列的SISO系統(tǒng),再用經(jīng)典頻域法分別設(shè)計(jì),實(shí)現(xiàn)了BTT導(dǎo)彈自動(dòng)駕駛儀的解耦,文獻(xiàn)[5]采用輸出反饋特征結(jié)構(gòu)配置方法,合理配置了閉環(huán)系統(tǒng)的特征值、特征向量,求取輸出反饋與前饋控制器,實(shí)現(xiàn)導(dǎo)彈三通道的解耦,文獻(xiàn)[6]利用變結(jié)構(gòu)控制和魯棒控制,實(shí)現(xiàn)系統(tǒng)的動(dòng)態(tài)解耦。
根據(jù)導(dǎo)彈在大攻角飛行過程中,導(dǎo)彈受到的參數(shù)不確定性和外界干擾等都非常大,采用一般的解耦方法很難保證控制系統(tǒng)的實(shí)時(shí)性要求,由于H∞混合靈敏度自身優(yōu)點(diǎn),這里提出了基于H∞混合靈敏度解耦控制器的設(shè)計(jì)方法。H∞混合靈敏度解耦控制器是將理想的無耦合的閉環(huán)系統(tǒng)參與到混合靈敏度設(shè)計(jì)中去,從而達(dá)到解耦的目的。在H∞混合靈敏度控制器設(shè)計(jì)中,需要進(jìn)行權(quán)函數(shù)的選取,使其達(dá)到解耦目的。該解耦控制方法的優(yōu)點(diǎn)在于:由于H∞混合靈敏度控制器本身的優(yōu)點(diǎn),使得該解耦控制器具有較強(qiáng)的魯棒穩(wěn)定性和抗干擾能力。
2 大攻角再入導(dǎo)彈簡化數(shù)學(xué)模型
導(dǎo)彈的動(dòng)力學(xué)特性由一組非線性、變系數(shù)的方程組描述。由于存在彈性振動(dòng)、液體晃動(dòng)和發(fā)動(dòng)機(jī)搖擺等因素的影響,該方程組非常復(fù)雜。為了對導(dǎo)彈運(yùn)動(dòng)方程的各種分析、計(jì)算和導(dǎo)彈控制系統(tǒng)設(shè)計(jì)提供方便,本文采用小擾動(dòng)簡化措施。考慮導(dǎo)彈剛體運(yùn)動(dòng)和彈性振動(dòng),假設(shè)偏航、滾動(dòng)通道標(biāo)準(zhǔn)彈道參數(shù)為零,即得到以下基于小擾動(dòng)假設(shè)的彈體運(yùn)動(dòng)方程。小擾動(dòng)彈體運(yùn)動(dòng)由剛性彈體姿態(tài)運(yùn)動(dòng)方程和彈性振動(dòng)方程組成。式(1)~式(3)為簡化的數(shù)學(xué)模型。
(1)俯仰一法向通道剛體運(yùn)動(dòng)方程:
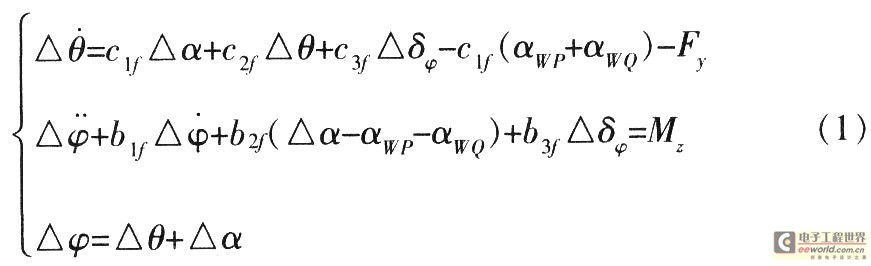
式中,αWP,αWQ分別為由于平穩(wěn)風(fēng)、切變風(fēng)作用形成的附加迎角;My,Mx為結(jié)構(gòu)干擾力矩;δ為彈道航向角;β為彈道側(cè)滑角;ψ為彈道偏航角;δψ為實(shí)際彈道偏航舵偏角;Fx為結(jié)構(gòu)干擾力。
(2)偏航一橫向通道剛體運(yùn)動(dòng)方程:
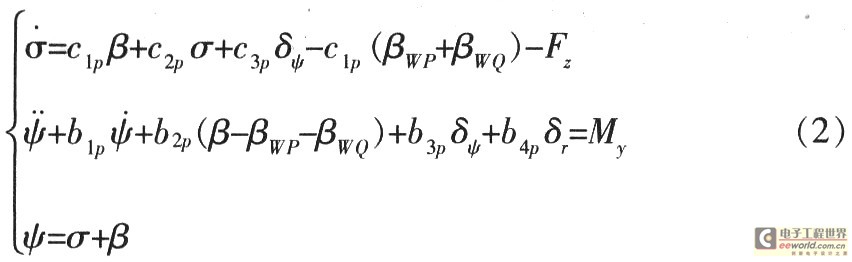
式中,βWP和βWQ分別為導(dǎo)彈由于平穩(wěn)風(fēng)、切變風(fēng)作用形成的附加側(cè)滑角;qiψ為偏航-橫向通道第i個(gè)振型(不包括剛體振型)所對應(yīng)的廣義坐標(biāo)。
(3)滾動(dòng)通道彈體運(yùn)動(dòng)方程:

式中,γ為彈道滾動(dòng)角;δr為彈道滾動(dòng)舵偏角。
3 耦合彈體的數(shù)學(xué)模型
由上述3個(gè)通道的簡化模型可知,偏航通道的彈體運(yùn)動(dòng)方程中含有滾動(dòng)通道的參量(δ,γ),滾動(dòng)通道的彈體運(yùn)動(dòng)方程中含有偏航通道的參量(δ,ψ,β)。將相互耦合的俯仰一法向通道(1),偏航通道(2)與滾動(dòng)通道(3)聯(lián)立,組成兩輸入、兩輸出的多變量系統(tǒng),取狀態(tài)向量為[β ψ ψ γ γ]T,控制輸入為u=[δψc δγc]T,測量輸出為r=[ψc γc]T,得到彈體運(yùn)動(dòng)方程的狀態(tài)空間表示為: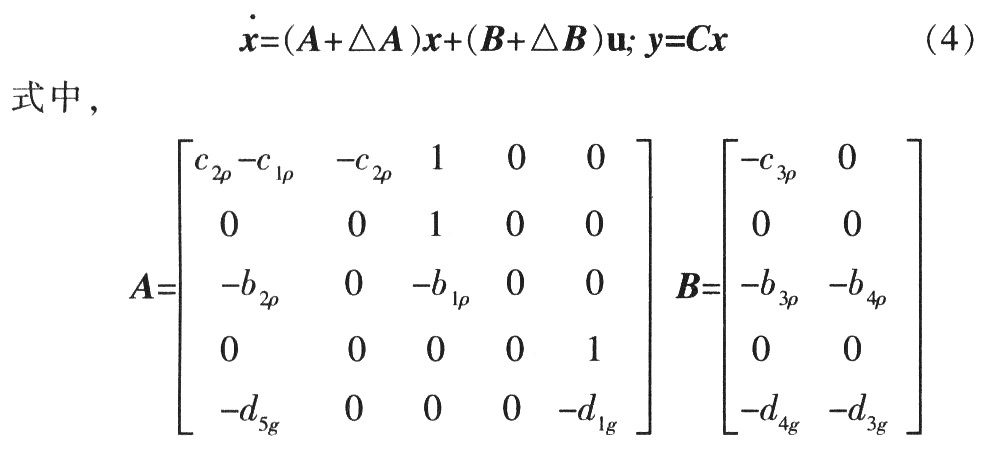

△A,△B為高頻彈性振動(dòng)等引起的參數(shù)不確定性部分, 2,3,4)為系數(shù)。
2,3,4)為系數(shù)。

由式(5)可知,S(s)+T(s)=I,I為單位陣。選擇適當(dāng)?shù)募訖?quán)函數(shù),對S(s)和T(s)進(jìn)行頻域整形,即在低頻段以減小靈敏度函數(shù)的增益為主,而在高頻段以減小互補(bǔ)靈敏度函數(shù)增益為主,使系統(tǒng)頻域整形后滿足:

式中,Ws(s)為反映系統(tǒng)抗干擾的性能加權(quán),WT(s)為反映系統(tǒng)魯棒性加權(quán)。
4.2 解耦控制器設(shè)計(jì)問題
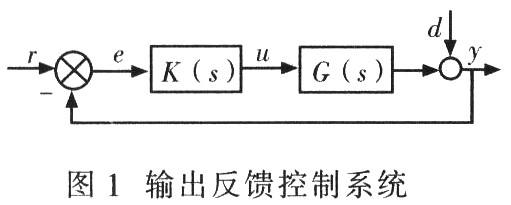
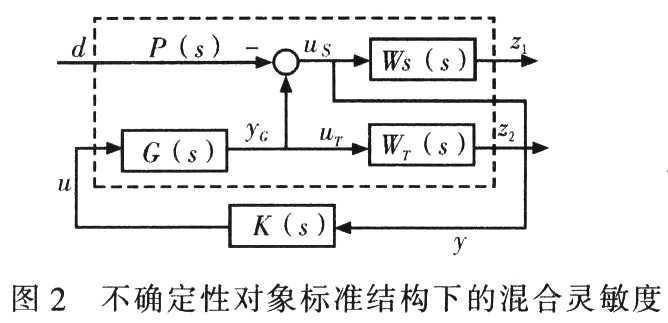
由式(5)可知,T(s)為圖1所示系統(tǒng)的閉環(huán)傳遞函數(shù)。為此可以將T(s)成形為理想的對角矩陣來達(dá)到解耦的目的。文獻(xiàn)[4]給出將H∞混合靈敏度成形為標(biāo)準(zhǔn)的H∞問題,本文是在此基礎(chǔ)上加以推導(dǎo),并選擇適當(dāng)加權(quán)函數(shù),達(dá)到解耦的目的。圖2為H∞混合靈敏度框圖。圖2中,z1,z2為性能評價(jià)輸出。uS,uT分別為Ws(s)和WT(s)的輸入,yG為G(s)的輸出。
則G0(s),WS(s),WT(s)的狀態(tài)空間實(shí)現(xiàn)分別為:

由圖2可知,系統(tǒng)P(s)的輸入為d,u,輸出為z1,z2,y。設(shè)x0,xS,xT為G(s),WT(s),WS(s)的輸出狀態(tài)。由圖2可以推導(dǎo):yG=C0x0+D0uyuT=yg,us=d-yG,則:

設(shè)x=[x0 xS xT]T,z=[z1 z2]T,定義虛擬輸出信號zp=F1x+F2dF3u,虛擬輸入信號dp=zp,并考慮式(7),得到廣義對象P(s)擴(kuò)展后的狀態(tài)空間的實(shí)現(xiàn)為: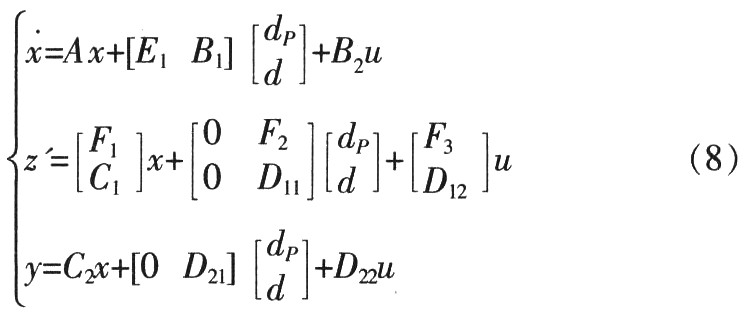
式(8)中參數(shù)不確定性△A,△B1和△B2應(yīng)滿足下面關(guān)系:
這樣,不確定系統(tǒng)的魯棒控制器設(shè)計(jì)問題轉(zhuǎn)化為H∞標(biāo)準(zhǔn)設(shè)計(jì)問題。
從H∞標(biāo)準(zhǔn)設(shè)計(jì)問題可看出,這里涉及加權(quán)函數(shù)WS(s),WT(s)的選擇,考慮到系統(tǒng)的解耦不變性,WS(s),WT(s)應(yīng)為對角陣,形式如下: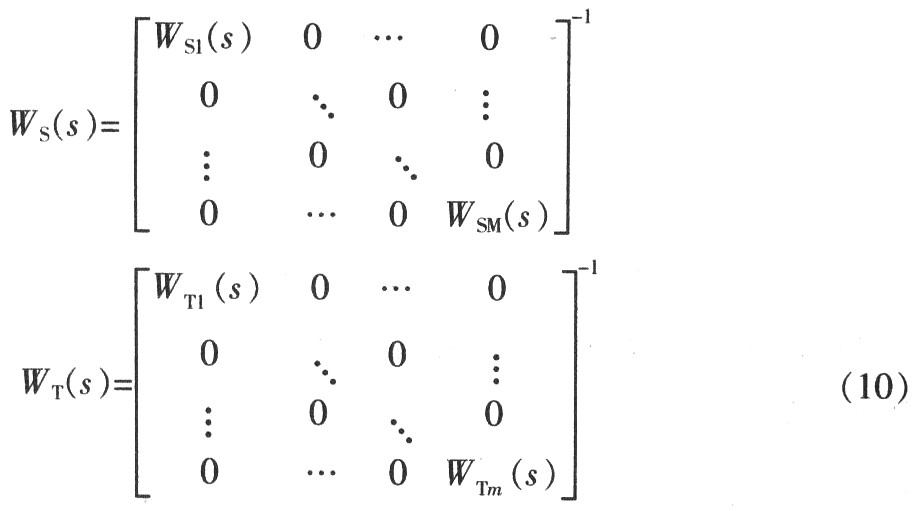
式中,WSj(s),WTj(s)(j=1,…,m)分別為
4.3 加權(quán)函數(shù)的選擇原則
對和S(s)和T(s)進(jìn)行頻域整形。在低頻段以減小靈敏度函數(shù)的增益為主,而在高頻段以減小互補(bǔ)靈敏度函數(shù)的增益為主。在低頻段使得S(jω)位于增益曲線VS(jω)以下,而在高頻段使得T(jω)位于VT(jω)以下。
5 仿真實(shí)例
以某飛行器為例,在某一飛行條件下,兩通道的跟蹤模型為![]() 其中:
其中:
根據(jù)式(5),式(6)靈敏度函數(shù)S,補(bǔ)靈敏度函數(shù)T滿足的條件及其式(10)和加權(quán)函數(shù)的選擇原則,可求得靈敏度函數(shù)及補(bǔ)靈敏度的加權(quán)函數(shù)Ws(s),WT(s):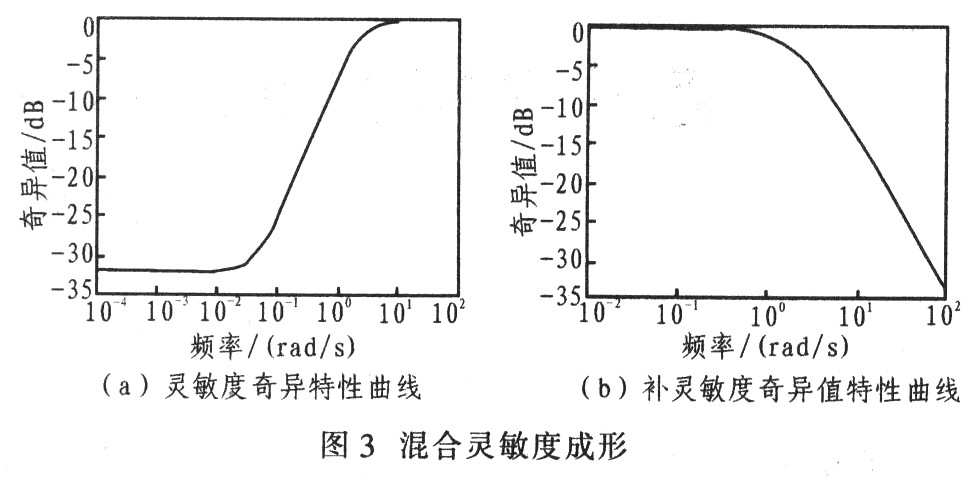
通過對其進(jìn)行仿真,進(jìn)行頻域整形,混合靈敏度成形如圖3所示。由圖3a和圖3b可知,通過適當(dāng)選擇加權(quán)函數(shù),對S和T進(jìn)行頻域整形,靈敏度和補(bǔ)靈敏度奇異值曲線全頻率段內(nèi)S和T的奇異值均小于其加權(quán)函數(shù)陣逆的奇異值,滿足奇異值要求,同時(shí)也滿足式(6)要求,能夠使系統(tǒng)具有良好的魯棒性及抗干擾能力,滿足系統(tǒng)的解耦條件,達(dá)到解耦目的。
6 結(jié)論
針對導(dǎo)彈大攻角再人過程中偏航通道和滾動(dòng)通道存在較大耦合的情況,采用H∞混合靈敏度解耦控制的方法進(jìn)行解耦,并對基于混合靈敏度解耦控制器的加權(quán)函數(shù)進(jìn)行選擇,使加權(quán)函數(shù)能夠更好的兼顧到互補(bǔ)靈敏度成形和系統(tǒng)解耦性,從而克服系統(tǒng)設(shè)計(jì)中的保守性。仿真結(jié)果表明。該解耦方法可以使系統(tǒng)具有良好的解耦性和魯棒穩(wěn)定性。