
摘要:建立基于光纖導(dǎo)光的數(shù)字全息干涉微形變測(cè)量系統(tǒng),首先,利用1×2單模光纖耦合器將激光源輸出光分為照明光和參考光,實(shí)現(xiàn)光路結(jié)構(gòu)簡(jiǎn)單、緊湊和穩(wěn)定性好;然后,通過(guò)短焦距和長(zhǎng)焦距準(zhǔn)直透鏡分別對(duì)照明光和參考光進(jìn)行準(zhǔn)直擴(kuò)束,使得參物光強(qiáng)度接近1:1,從而獲得高信噪比的數(shù)字全息圖。利用基于數(shù)字全息的雙曝光方法對(duì)鋼板的波長(zhǎng)量級(jí)微形變進(jìn)行實(shí)驗(yàn)測(cè)量。通過(guò)全息記錄、再現(xiàn)及相位解包裹得到高精度的測(cè)量結(jié)果。實(shí)驗(yàn)結(jié)果表明,建立的基于光纖導(dǎo)光的數(shù)字全息微形變測(cè)量系統(tǒng)具有光路簡(jiǎn)單、穩(wěn)定性好等特點(diǎn),而且測(cè)量精度高。
關(guān)鍵詞:數(shù)字全息;光纖導(dǎo)光;形變測(cè)量;相位解包裹
0 引言
數(shù)字全息采用光電探測(cè)器作為記錄介質(zhì),計(jì)算機(jī)模擬參考光進(jìn)行全息再現(xiàn),可以獲取物光的振幅和相位信息,重構(gòu)物體的三維形貌。該技術(shù)具有可處理相位信息、高效自動(dòng)化、實(shí)時(shí)測(cè)量、穩(wěn)定性高等諸多優(yōu)點(diǎn),近年來(lái)被廣泛研究和應(yīng)用。特別在微形變測(cè)量領(lǐng)域,數(shù)字全息方法作為一種相干測(cè)量方法,具有非接觸、實(shí)時(shí)性、高分辨率、全視場(chǎng)等特點(diǎn),倍受眾多研究者關(guān)注。雙曝光全息干涉法是典型的用于微形變測(cè)量的方法,其原理是將初始物光波面與變形以后的物光波面相比較。在記錄過(guò)程中對(duì)形變物面作二次曝光,一次記錄初始物光波的全息圖,一次記錄形變后物光波的全息圖。用原參考光進(jìn)行全息再現(xiàn),得到形變前后的兩物光波面相干產(chǎn)生條紋,通過(guò)分析條紋,了解波面的變化信息。目前,數(shù)字全息光路主要采用透鏡、棱鏡、波片以及空間濾波器等光學(xué)元件構(gòu)建相干成像光路,而這些分離光學(xué)元件穩(wěn)定性不高且體積大,非常不利于測(cè)量系統(tǒng)的小型化、穩(wěn)定性,大大限制了全息系統(tǒng)的實(shí)際測(cè)量應(yīng)用。
采用光纖波導(dǎo)替代全息光路中各種分立光學(xué)元件,使系統(tǒng)更加緊湊、穩(wěn)定,此外光纖可繞曲、抗電磁、耐腐蝕的特點(diǎn),使系統(tǒng)適于復(fù)雜環(huán)境、封閉結(jié)構(gòu)、強(qiáng)電磁和強(qiáng)腐蝕等環(huán)境。因此,本文設(shè)計(jì)并建立了基于光纖導(dǎo)光的數(shù)字全息微形變測(cè)量系統(tǒng)。具體方法是,利用1×2單模光纖耦合器將激光源輸出光分為照明光和參考光,同時(shí)通過(guò)短焦距和長(zhǎng)焦距準(zhǔn)直透鏡分別對(duì)照明光和參考光進(jìn)行準(zhǔn)直擴(kuò)束,使得參物光強(qiáng)度接近1:1,以獲得高信噪比的數(shù)字全息圖。通過(guò)對(duì)發(fā)生了波長(zhǎng)量級(jí)微形的鋼板進(jìn)行實(shí)際測(cè)量,驗(yàn)證了本文建立系統(tǒng)的可行性和優(yōu)越性。
1 雙曝光數(shù)字全息干涉測(cè)量原理
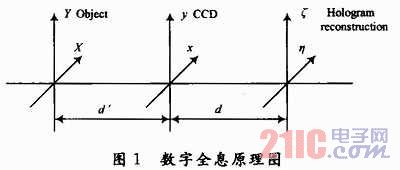
數(shù)字全息原理如圖1所示。物參光在相機(jī)光敏面干涉記錄,計(jì)算機(jī)模擬參考光,用菲涅爾-基爾霍夫衍射關(guān)系,對(duì)物光波進(jìn)行數(shù)字重建,XY平面為物平面,xy平面為全息記錄平面,ηζ平面為再現(xiàn)平面,d’為全息記錄距離。
在滿足菲涅爾近似條件的情況下,再現(xiàn)物光波表示為:
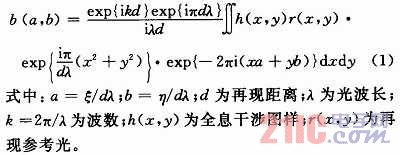
用CCD相機(jī)記錄干涉圖樣得到離散化的數(shù)字全息圖,進(jìn)而再現(xiàn)物光場(chǎng)表示為:
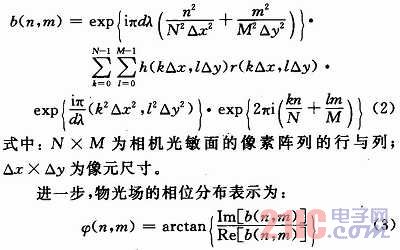
式中:Im為取虛部,Re為取實(shí)部。
全息雙曝光干涉測(cè)量原理:基于物體狀態(tài)變化前后再現(xiàn)物光場(chǎng)的相位差值得到物體形變或位移量。首先,物光場(chǎng)相位差表示為:
![]()
式中:φ1為原始物光場(chǎng)相位分布;φ2為變化后物光場(chǎng)相位分布。需要指出的是,由于計(jì)算機(jī)三角函數(shù)的計(jì)算特點(diǎn),△φ的范圍為[-π,+π],需要進(jìn)行解包裹處理。然后,基于上述的物光場(chǎng)相位差,得到物體的形變或位移量為:
![]()
2 實(shí)驗(yàn)裝置與結(jié)果分析
對(duì)于采用光纖波導(dǎo)的數(shù)字全息光路結(jié)構(gòu),光纖類(lèi)型的選擇是關(guān)鍵。多模光纖纖芯大,傳輸光能量較大,但由于其存在許多模式的光干涉,輻射斑點(diǎn)圖對(duì)外部條件十分敏感,相位漂移難于補(bǔ)償,導(dǎo)致條紋可見(jiàn)度降低和再現(xiàn)效率下降,因而不太適合做系統(tǒng)的導(dǎo)光介質(zhì)。單模光纖出射光強(qiáng)近似為高斯分布,當(dāng)光纖孔徑與端面到被計(jì)算的平面的距離相比很小時(shí),只用輻射的中心部分,目標(biāo)平面為均勻平面波,因而用單模光纖可以不用空間濾波器。
本文設(shè)計(jì)的全息光路如圖2所示,其基本結(jié)構(gòu)為Mach-Zender干涉光路。光源是功率為50 mW、波長(zhǎng)為532 nm的倍頻Nd:YAG固體激光器(Laser)。其輸出光束通過(guò)1個(gè)1×2基模光纖耦合器分為物體照明光和參考光。由于單模光纖芯徑為5/μm,為了避免激光耦合進(jìn)光纖的效率不高,選用加拿大OZoptics公司生產(chǎn)的插座式非接觸型激光光纖耦合器,耦合效率可達(dá)60%。進(jìn)而,為了確保在生產(chǎn)全息圖時(shí),物光與參考光的強(qiáng)度比約為1:1,即為了獲得高信噪比的數(shù)字全息圖,作為照明光的光纖出射光采用焦距為125 mm(L4)的準(zhǔn)直透鏡進(jìn)行擴(kuò)束,而作為參考光的光纖輸出光采用焦距為250 mm(L2)的準(zhǔn)直透鏡進(jìn)行擴(kuò)束。照明光照射物體,其反射光攜帶物體信息稱(chēng)為物光(O),然后和參考光(R)經(jīng)非偏振棱鏡合光后,以一小角度在記錄面上相干疊加得到離軸全息圖。用于記錄全息圖的相機(jī)像素陣列為1 024×1 024,大小為6.7μm×6.7 μm的CMOS相機(jī)。實(shí)驗(yàn)中通過(guò)計(jì)算機(jī)控制相機(jī),實(shí)現(xiàn)全息圖的數(shù)字化記錄與存儲(chǔ)。實(shí)驗(yàn)中的測(cè)量物體為四周固定鋼板,如圖3所示。鋼板的尺寸為60 mm×60 mm、厚度為1 mm。通過(guò)高精度螺紋副擠壓鋼板施加壓力,使鋼板發(fā)生波長(zhǎng)量級(jí)的微小形變。鋼板面距離CMOS的距離,即全息記錄距離為27 cm。


在全息再現(xiàn)計(jì)算中,首先采用Tukey窗對(duì)全息圖進(jìn)行切趾處理,以減小邊緣衍射引起的光場(chǎng)起伏。然后,采用空頻域?yàn)V波方法去除零級(jí)項(xiàng)和共軛像對(duì)原始像的影響,即對(duì)切趾后的全息圖進(jìn)行傅里葉變換得到其頻譜,進(jìn)而選取原始像對(duì)應(yīng)的頻譜分量,最后通過(guò)逆傅里葉變換得到僅包含原始像信息的全息圖。接著,采用菲涅爾再現(xiàn)算法得到物光場(chǎng)的復(fù)振幅分布,即反映物體形貌的相位分布。
圖4給出了實(shí)驗(yàn)結(jié)果。其中,圖4(a)和圖4(d)為鋼板形變量的包裹相位圖,圖4(a)為較小形變時(shí)包裹相位圖,圖4(d)為較大形變時(shí)包裹相位圖。從圖可以看出,實(shí)驗(yàn)得到的相位差圖條紋清晰、信噪比高,并且包裹圖像條紋與形變物面的形變形狀、形變位置、形變大小與實(shí)際相符,說(shuō)明本文設(shè)計(jì)的基于光波導(dǎo)的光路結(jié)構(gòu)完全可行。圖4(b)和圖4(e)分別是進(jìn)行相位解包裹后的相位圖,圖4(c)和圖4(f)分別為圖4(a)和圖4(d)橫向中心線處對(duì)應(yīng)的解包裹相位值。需要指出的是,針對(duì)激光數(shù)字全息得到的包裹相位圖,枝切法解包裹得到的相位形變量精度最高,最小梯度加權(quán)最小二乘法的形變形貌恢復(fù)效果最好,因此實(shí)驗(yàn)中采用枝切法相位解包裹,然后經(jīng)高斯低通濾波,得到較精確的形變量值。
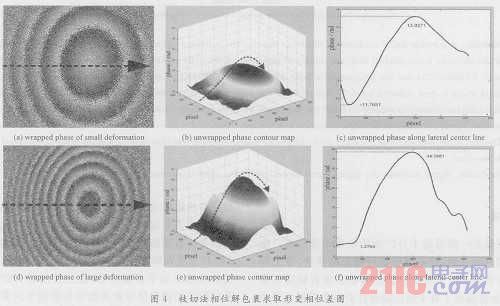

表1給出了實(shí)驗(yàn)測(cè)量形變相位差結(jié)果與傳統(tǒng)數(shù)條紋法結(jié)果進(jìn)行的比較,實(shí)驗(yàn)得到的解包裹相位差值恰好落在真實(shí)相位差值范圍之內(nèi)。實(shí)驗(yàn)結(jié)果表明,本文提出的基于光纖導(dǎo)光的激光數(shù)字全息微形變測(cè)量系統(tǒng)能夠得到高信噪比的包裹相位差圖,即高精度的測(cè)量結(jié)果,并且系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、緊湊、穩(wěn)定性好。
3 結(jié)論
本文設(shè)計(jì)并搭建了基于光纖導(dǎo)光的數(shù)字全息干涉測(cè)量系統(tǒng),采用1×2單模光纖耦合器實(shí)現(xiàn)分光產(chǎn)生照明光和參考光,并在照明光路和參考光路中分別采用短焦距和長(zhǎng)焦距的準(zhǔn)直透鏡進(jìn)行光束擴(kuò)束,使得物參光在記錄面上的強(qiáng)度比接近1:1,從而獲得高信噪比的數(shù)字全息圖。
采用基于數(shù)字全息的雙曝光法對(duì)波長(zhǎng)量級(jí)微形變鋼板進(jìn)行形變測(cè)量,通過(guò)數(shù)字全息記錄、再現(xiàn)和形變包裹相位差圖解包裹,得到形變相位差值。實(shí)驗(yàn)結(jié)果表明,基于光纖導(dǎo)光的數(shù)字全息干涉測(cè)量系統(tǒng)能夠獲得高信噪比的相位差圖,進(jìn)而得到高精度的物體微小形變量。因此,本文建立的基于光纖導(dǎo)光的數(shù)字全息干涉測(cè)量系統(tǒng)不僅體積小、重量輕、結(jié)構(gòu)緊湊、穩(wěn)定性好,而且測(cè)量過(guò)程簡(jiǎn)單且精度高。