
靶場(chǎng)承擔(dān)武器裝備研制、設(shè)計(jì)定型等試驗(yàn)任務(wù),。長(zhǎng)期以來(lái)受武器系統(tǒng)研制部門體制,、技術(shù)、設(shè)計(jì)和使用目的等諸多因素限制和影響,,測(cè)試設(shè)備一般針對(duì)被測(cè)試武器系統(tǒng)具體型號(hào)進(jìn)行設(shè)計(jì),,導(dǎo)致其通用性差,升級(jí)改造困難,。
系統(tǒng)硬件基于虛擬儀器技術(shù)和針對(duì)被測(cè)試信號(hào)形式采用模塊化設(shè)計(jì),,軟件基于數(shù)據(jù)庫(kù)技術(shù)進(jìn)行設(shè)計(jì)。在應(yīng)用時(shí),,針對(duì)被測(cè)試信號(hào)種類和規(guī)模等具體情況,,通過對(duì)采集器軟硬件模塊進(jìn)行組合與配置,便可組成功能不同,、規(guī)模不等的專用測(cè)試系統(tǒng),。當(dāng)其功能不能滿足試驗(yàn)測(cè)試需求時(shí),只需針對(duì)需求增加軟硬件模塊,,而設(shè)備主體可以不變或僅作一定修改便可適應(yīng)其他型號(hào)武器系統(tǒng)試驗(yàn)需要,。
1 硬件組成與功能
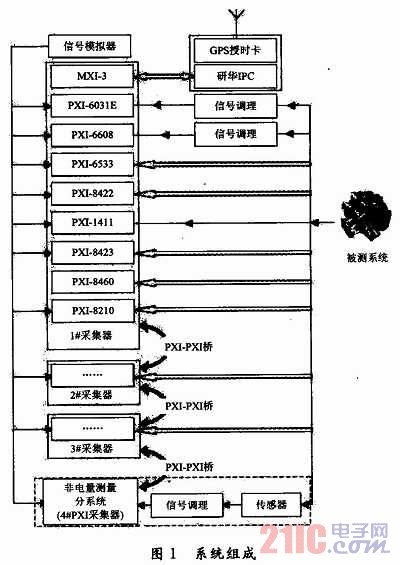
艦載武器試驗(yàn)測(cè)試系統(tǒng)基于PXI總線模塊進(jìn)行設(shè)計(jì),系統(tǒng)由主控器,、采集器,、信號(hào)拾取/調(diào)理設(shè)備和信號(hào)模擬器四部分組成,,其組成如圖1所示,。
(1)主控器
主控器由工控機(jī)系統(tǒng)配置PXI-PCI8335外接式控制器模塊(MXI-3)和GPS授時(shí)卡組成。工控機(jī)負(fù)責(zé)系統(tǒng)管理,,采集器采集數(shù)據(jù)的匯總,、存貯、處理,。MXI-3模塊用于工控機(jī)對(duì)各采集器的控制,。GPS授時(shí)卡采用PCI總線插卡結(jié)構(gòu),可以接收GPS衛(wèi)星時(shí)間信息或靶場(chǎng)IRIG-B碼時(shí)間信息,,實(shí)現(xiàn)系統(tǒng)與靶場(chǎng)測(cè)控網(wǎng)的同步,。通過對(duì)GPS或IRIG-B時(shí)間信息的處理,在PCI總線上可以獲取1 PPS,20 PPS中斷信號(hào)及并行時(shí),、分,、秒、毫秒時(shí)間信息,,并可以輸出TTL電平的1 PPS和20 PPS同步信號(hào),。
(2)采集器
采集器由3個(gè)電信號(hào)采集器(1#、2#,、3#采集器)和非電量測(cè)量分系統(tǒng)(4#采集器)組成,。被測(cè)電信號(hào)主要包括直流電壓信號(hào)、發(fā)控指令信號(hào),、脈沖頻率信號(hào)和各種數(shù)字信號(hào)(串行,、并行和網(wǎng)絡(luò)信息)。非電量參數(shù)主要包括溫度,、角速度,、振動(dòng)、壓力和應(yīng)變等信號(hào),。
3個(gè)電信號(hào)采集器由PXI-1006機(jī)箱和PXI總線模塊組成,,由PXI-1006機(jī)箱的PXI-PXI橋?qū)崿F(xiàn)采集器間的連接。PXI總線模塊包括NI的PXI-6608計(jì)數(shù)/定時(shí)器模塊,,PXI-6031E數(shù)據(jù)采集模塊,,PXI-1411圖像信號(hào)采集模塊,PXI-6533數(shù)字I/O模塊,,PXI-8422 RS 232接口模塊,,PXI-8423 RS 422/485接口模塊,PXI-8210以太網(wǎng)接口模塊和PXI-8460CAN總線模塊,。
對(duì)于每個(gè)PXI采集器的具體配置可根據(jù)被測(cè)試信號(hào)種類、數(shù)量和被測(cè)系統(tǒng)的物理位置確定,。在具體應(yīng)用時(shí)可根據(jù)測(cè)試對(duì)象的不同,,靈活配置各采集器功能。
非電量測(cè)量分系統(tǒng)由傳感器,、信號(hào)調(diào)理模塊和4#采集器組成,。傳感器包括溫度傳感器、壓力傳感器,、應(yīng)變傳感器,、振動(dòng)和角速度傳感器。信號(hào)調(diào)理模塊采用SCXI-1102B和SCXI-1120D,。采集器配置PXI-6071E數(shù)據(jù)采集模塊和PXI-6608計(jì)數(shù)/定時(shí)器模塊,。PXI-6608計(jì)數(shù)/定時(shí)器模塊用于接收處理GPS衛(wèi)星時(shí)間信息或IRIG—B碼時(shí)間信息,用于實(shí)現(xiàn)與系統(tǒng)同步。
(3)信號(hào)拾?。{(diào)理設(shè)備
信號(hào)拾?。{(diào)理設(shè)備用于完成對(duì)被測(cè)信號(hào)的拾取和調(diào)理。為了方便與被測(cè)設(shè)備的聯(lián)接,;需配置線纜轉(zhuǎn)接箱,。
(4)信號(hào)模擬器
信號(hào)模擬器由工控計(jì)算機(jī)系統(tǒng)和多種被測(cè)信號(hào)模擬卡組成,用于被測(cè)信號(hào)的模擬/仿真,。
2 軟件設(shè)計(jì)
2.1 設(shè)計(jì)思路
對(duì)于現(xiàn)代計(jì)算機(jī)測(cè)試系統(tǒng)而言,,軟件是系統(tǒng)的靈魂。對(duì)于簡(jiǎn)單的測(cè)試系統(tǒng)因測(cè)試任務(wù)單一,,硬件系統(tǒng)專用,,有關(guān)配置在軟件設(shè)計(jì)時(shí)可統(tǒng)一完成。由于其測(cè)試結(jié)果數(shù)據(jù)量相對(duì)較小,、數(shù)據(jù)處理和輸出簡(jiǎn)單,,將整個(gè)測(cè)試任務(wù)作為一個(gè)整體一次完成是最佳的選擇。
對(duì)于綜合測(cè)試系統(tǒng)而言,,因其規(guī)模較大且要求具有較好的靈活性,,采用上述軟件設(shè)計(jì)方法顯然是不合適的。如果將系統(tǒng)以一個(gè)任務(wù)看待難以實(shí)現(xiàn)對(duì)眾多系統(tǒng)硬件模塊和大量試驗(yàn)數(shù)據(jù)的科學(xué)管理,。
采用數(shù)據(jù)庫(kù)技術(shù)可實(shí)現(xiàn)綜合測(cè)試系統(tǒng)中測(cè)試任務(wù),、測(cè)試儀器、系統(tǒng)配置,、測(cè)試數(shù)據(jù)的有序管理,。系統(tǒng)數(shù)據(jù)庫(kù)包括系統(tǒng)任務(wù)庫(kù)、系統(tǒng)儀器庫(kù),、通道配置及通道標(biāo)定數(shù)據(jù)庫(kù)和測(cè)試數(shù)據(jù)庫(kù)等,。
測(cè)試任務(wù)庫(kù)是為組織管理測(cè)試任務(wù)而設(shè)計(jì)的,它定義了任務(wù)名稱,、任務(wù)代碼,,同時(shí)包括對(duì)任務(wù)的描述以及相應(yīng)的幫助文件。任務(wù)代碼被設(shè)計(jì)為區(qū)分任務(wù)的惟一特征碼,,并將其作為測(cè)試系統(tǒng)執(zhí)行任務(wù)的令牌,。系統(tǒng)儀器庫(kù)中存儲(chǔ)測(cè)試系統(tǒng)所包括的全部?jī)x器或硬件模塊,它是定義專用測(cè)試系統(tǒng)的基礎(chǔ),。系統(tǒng)通道庫(kù)包括系統(tǒng)通道配置庫(kù)和對(duì)應(yīng)每一個(gè)通道的標(biāo)定數(shù)據(jù)庫(kù),。通道配置庫(kù)負(fù)責(zé)管理所有測(cè)試任務(wù)的通道配置,它描述和定義每項(xiàng)測(cè)試任務(wù)所使用的通道,。標(biāo)定數(shù)據(jù)庫(kù)用于保存對(duì)應(yīng)通道的標(biāo)定數(shù)據(jù),,使測(cè)試執(zhí)行中得到的數(shù)據(jù)與實(shí)際的物理量對(duì)應(yīng)起來(lái)。為了科學(xué)有序地管理測(cè)試數(shù)據(jù)和重現(xiàn)測(cè)試現(xiàn)場(chǎng),與測(cè)試現(xiàn)場(chǎng)有關(guān)的測(cè)試信息,、測(cè)試數(shù)據(jù)以及數(shù)據(jù)編輯和數(shù)據(jù)輸出過程中產(chǎn)生的中間數(shù)據(jù)等都應(yīng)保存,,為此系統(tǒng)軟件應(yīng)建立測(cè)試數(shù)據(jù)庫(kù)。
2.2 軟件開發(fā)環(huán)境
系統(tǒng)采用Windows XP操作系統(tǒng),,采用LabVIEW 8語(yǔ)言編寫應(yīng)用程序,。數(shù)據(jù)庫(kù)管理軟件采用Visual C++6.0語(yǔ)言編程,用于實(shí)現(xiàn)系統(tǒng)配置,、試驗(yàn)數(shù)據(jù)等信息的存儲(chǔ),、查詢、檢索和回放,。
2. 3 軟件結(jié)構(gòu)與應(yīng)用軟件功能
2.3.1 軟件結(jié)構(gòu)
測(cè)試系統(tǒng)軟件由儀器驅(qū)動(dòng)層,、I/O接口層、測(cè)試管理層和測(cè)試程序?qū)铀牟糠謽?gòu)成,。
儀器驅(qū)動(dòng)軟件是對(duì)儀器硬件執(zhí)行通信與控制的軟件,,其軟件是由儀器標(biāo)準(zhǔn)件生產(chǎn)商提供的用于對(duì)儀器硬件進(jìn)行底層操作的一組較抽象的操作函數(shù)集,包括初始化,、配置,、作用/狀態(tài)、數(shù)據(jù),、實(shí)用和關(guān)閉功能,。
I/O接口軟件是計(jì)算機(jī)與采集器儀器硬件或功能模塊間連接的低層通信協(xié)議。
測(cè)試管理軟件是用于管理和執(zhí)行某一測(cè)試任務(wù)的軟件包,。包括實(shí)現(xiàn)人機(jī)對(duì)話,、采集器采集數(shù)據(jù)的匯總,、數(shù)據(jù)處理,、數(shù)據(jù)交換,、被測(cè)系統(tǒng)性能評(píng)估,、被測(cè)信號(hào)和目標(biāo)指示信息模擬/仿真、數(shù)據(jù)庫(kù)管理等功能,。
測(cè)試程序用于各采集器特定測(cè)試功能的實(shí)現(xiàn),。測(cè)試程序直接面向具體測(cè)試任務(wù),,是根據(jù)測(cè)試任務(wù)的需求對(duì)采集器設(shè)備層組件重構(gòu)后生成的面向具體應(yīng)用的數(shù)據(jù)采集程序,。
2.3.2 應(yīng)用軟件功能
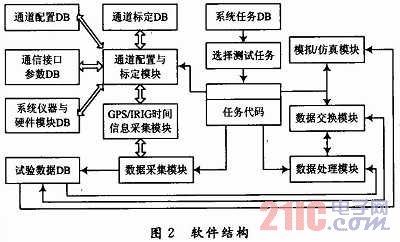
系統(tǒng)應(yīng)用軟件包括通道配置與標(biāo)定、GPS/IRIG-B碼時(shí)間信息采集,、測(cè)試執(zhí)行(數(shù)據(jù)采集),、數(shù)據(jù)處理(包括被測(cè)系統(tǒng)性能評(píng)估)、數(shù)據(jù)交換,、被測(cè)信號(hào)模擬/仿真等功能模塊,。其中數(shù)據(jù)庫(kù)包括系統(tǒng)任務(wù)DB、系統(tǒng)儀器和硬件模塊DB、通道配置DB,、通道標(biāo)定DB,、通信接口參數(shù)DB和試驗(yàn)數(shù)據(jù)DB。軟件結(jié)構(gòu)如圖2所示,。
(1)通道配置與標(biāo)定模塊,。針對(duì)每項(xiàng)具體測(cè)試任務(wù)的不同對(duì)所需硬件模塊進(jìn)行初始化,從而組成專用測(cè)試系統(tǒng),。在專用測(cè)試系統(tǒng)構(gòu)成后,,對(duì)系統(tǒng)硬件模塊進(jìn)行標(biāo)定,同時(shí)對(duì)采集器通信接口參數(shù)進(jìn)行設(shè)定,。
當(dāng)采集器機(jī)箱內(nèi)不具備任務(wù)所需硬件模塊時(shí),,首先用人工方式完成所需硬件模塊的配置工作。
(2)GPS/IRIG—B碼時(shí)間信息采集模塊,。該模塊用于實(shí)現(xiàn)衛(wèi)星時(shí)間或靶場(chǎng)時(shí)間信息的采集,,從而實(shí)現(xiàn)系統(tǒng)與靶場(chǎng)測(cè)控網(wǎng)的同步。
(3)數(shù)據(jù)采集模塊,。完成當(dāng)前具體測(cè)試任務(wù)的數(shù)據(jù)采集,,其執(zhí)行主體是系統(tǒng)配置與標(biāo)定時(shí)定義的專用測(cè)試系統(tǒng)。采集數(shù)據(jù)除原始試驗(yàn)數(shù)據(jù)外,,還包括系統(tǒng)配置與標(biāo)定,、試驗(yàn)日期與航次號(hào)等相關(guān)信息,以便分析試驗(yàn)結(jié)果時(shí)使用,。
(4)數(shù)據(jù)處理模塊,。完成測(cè)試數(shù)據(jù)的回放、編輯,、量綱轉(zhuǎn)換,。當(dāng)系統(tǒng)聯(lián)入靶場(chǎng)測(cè)控網(wǎng)后還可進(jìn)行試驗(yàn)數(shù)據(jù)的實(shí)時(shí)處理。結(jié)合被試系統(tǒng)的戰(zhàn)術(shù),、技術(shù)指標(biāo)等信息,,可對(duì)試驗(yàn)結(jié)果進(jìn)行分析評(píng)估。
(5)數(shù)據(jù)交換模塊,。完成測(cè)試數(shù)據(jù)的發(fā)送或接收靶場(chǎng)測(cè)控網(wǎng)數(shù)據(jù),。包括向靶場(chǎng)測(cè)控網(wǎng)發(fā)送艦載武器系統(tǒng)原始試驗(yàn)數(shù)據(jù)(實(shí)時(shí)或事后),接收靶場(chǎng)測(cè)控網(wǎng)提供的目標(biāo)真值數(shù)據(jù),,載艦姿態(tài)i航速和位置等其他參試設(shè)備試驗(yàn)數(shù)據(jù),。
(6)信號(hào)模擬/仿真模塊。模擬被測(cè)信號(hào)供系統(tǒng)調(diào)試或任務(wù)準(zhǔn)備使用,。仿真空中或海上目標(biāo)信息向武器系統(tǒng)進(jìn)行回放,,供武器系統(tǒng)調(diào)試和艦艇水兵訓(xùn)練使用,。
(7)數(shù)據(jù)庫(kù)管理模塊。獨(dú)立于系統(tǒng)應(yīng)用軟件,,主要用于對(duì)系統(tǒng)數(shù)據(jù)庫(kù)的管理,。
3 結(jié)論
系統(tǒng)基于NI的多機(jī)箱方案構(gòu)成分布式測(cè)試系統(tǒng)。硬件基于虛擬儀器技術(shù)和針對(duì)被測(cè)試信號(hào)形式采用模塊化設(shè)計(jì),,軟件基于LabVlEW語(yǔ)言和數(shù)據(jù)庫(kù)技術(shù),,這種設(shè)計(jì)為系統(tǒng)功能的進(jìn)一步擴(kuò)展提供了保證,達(dá)到了適應(yīng)不同試驗(yàn)需求,,提升系統(tǒng)性能和其通用性的目的,。