
摘 要:針對紅外弱小目標檢測" title="目標檢測">目標檢測和跟蹤的實時性要求,基于法國Sofradir中波(3~5μm)紅外熱成像儀" title="紅外熱成像儀">紅外熱成像儀和英國Hunt Engineering的雙DSP管理板卡HEPC9、雙DSPC6201和雙FPGA搭建了一套實時紅外圖像" title="紅外圖像">紅外圖像處理系統(tǒng)" title="處理系統(tǒng)">處理系統(tǒng)。同時針對C6201微處理器成功地實現(xiàn)了弱小目標檢測和跟蹤程序的優(yōu)化和移植。系統(tǒng)測試表明,該系統(tǒng)可實時、有效地檢測跟蹤每秒50幀,每幀320×240像素,每像素14位的低信噪比的復(fù)雜序列圖像。
關(guān)鍵詞:紅外熱成像儀? 雙DSPC6201? 目標檢測與跟蹤
?
紅外弱小目標的檢測與跟蹤方法,是紅外搜索與跟蹤系統(tǒng)、精確制導(dǎo)系統(tǒng)、紅外預(yù)警系統(tǒng)、大視場目標監(jiān)視系統(tǒng)、衛(wèi)星遙感系統(tǒng)等的一項核心技術(shù)。焦平面紅外探測器具有極強的抗干擾能力,而且在作戰(zhàn)中不會產(chǎn)生各種輻射,隱蔽性好且適應(yīng)能力強; 紅外成像可穿透煙霧,分辨率高,空間分辨能力更可達0.1毫弧度;紅外成像不受低空工作時地面和海面的多路徑效應(yīng)影響,低空導(dǎo)引精度很高,可直接攻擊目標要害,具有多目標全景觀察、追蹤及目標識別能力,可整合微處理器實現(xiàn)對目標的熱成像智慧型化導(dǎo)引,具有良好的抗目標隱形能力。
然而在低信噪比條件下,尤其是針對實際情況下的各種背景干擾、人為干擾以及探測器低頻掃描噪聲和高頻探測噪聲所導(dǎo)致的低信噪比條件下,目標點極易被噪聲所淹沒,從而難以實現(xiàn)對弱小目標的可靠檢測和跟蹤。實際上,現(xiàn)有的弱小目標檢測和跟蹤算法[1~3]主要適用于信噪比較高的情況,而且普遍存在一個共同的致命弱點:計算量大、運行時間長,無法滿足實時處理的要求。因此,盡快研究出一套實用的弱小目標檢測與跟蹤的紅外圖像處理" title="圖像處理">圖像處理系統(tǒng)就成為一項亟待突破的關(guān)鍵技術(shù)。
針對上述問題,本文成功地研制了一種針對實際應(yīng)用的紅外圖像處理系統(tǒng)。該系統(tǒng)基于法國Sofradir中波(3~5μm)紅外熱成像儀和英國Hunt Engineering的雙DSP 管理板卡HEPC9,雙DSPC6201和雙FPGA搭建了一套實時的紅外圖像處理系統(tǒng)。同時針對紅外弱小目標(大約2dB)檢測和跟蹤的實時性要求,基于C6201微處理器成功地實現(xiàn)了弱小目標檢測和跟蹤程序的移植和優(yōu)化,實現(xiàn)了高精度紅外圖像的實時采集、傳輸、處理和顯示,具有良好的性能和廣闊的應(yīng)用前景。
1 硬件原理
硬件系統(tǒng)結(jié)構(gòu)如圖1所示。為了確保構(gòu)建的圖像處理系統(tǒng)可以達到原理樣機的要求,同時在實際條件又沒有合作飛機的前提下,將圖像處理系統(tǒng)的樣機功能分解為:高精度圖像的高速穩(wěn)定傳輸和實測數(shù)據(jù)的實時處理兩個部分。(1)針對Sofradir中波(3~5μm)紅外熱成像儀,基于HEPC9母卡的雙DSP管理功能,采用雙DSPTMSC6201實現(xiàn)對圖像的并行處理,提高運算性能。同時采用一個FPGA用于實現(xiàn)數(shù)據(jù)接收的時序和控制,其時序嚴格按照法國Sofradir中波紅外熱成像儀的實際時序(見圖4),以驗證系統(tǒng)的高速穩(wěn)定通信能力。(2)基于HEPC9母卡的雙DSP管理功能,采用雙DSPTMSC6201實現(xiàn)對圖像的并行處理,提高運算性能,同時采用雙FPGA系統(tǒng)。一個FPGA用于實現(xiàn)數(shù)據(jù)接收的時序和控制,其時序嚴格按照法國Sofradir中波(3~5μm)紅外熱成像儀的實際時序(見圖4);而另一個FPGA用于與調(diào)用硬盤中存儲的實際測試數(shù)據(jù)一起模擬實際的測量環(huán)境。為實現(xiàn)每秒50幀的處理能力,采用了具有可編程序的板卡HERON-FPGA3S,實現(xiàn)對真實環(huán)境和實測數(shù)據(jù)的有效測試。
?
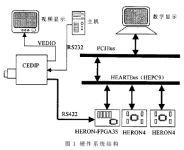
該系統(tǒng)可廣泛地應(yīng)用于實際測試圖像的后期處理和檢測跟蹤算法的實際性能考核,具有極大的試驗和測試功能。實時紅外圖像處理系統(tǒng)由三部分組成:
(1) 紅外成像儀
紅外成像儀采用法國SOFTDIR生產(chǎn)的紅外頭部以及美國CEDIP公司生產(chǎn)的后續(xù)處理板卡組成。紅外攝像儀具有兩個輸出端口和一個RS232控制端口。一個輸出端口為模擬的視頻輸出端口,可以使用監(jiān)視器進行圖像的實時觀察。另一個輸出端口是RS422平衡式差分數(shù)字信號輸出端口。RS232串行控制端口用來控制攝像頭的性能參數(shù),如:調(diào)節(jié)數(shù)字圖像的輸出速率(25幀/秒、50幀/秒和100幀/秒可選)、圖像的積分時間以及校正圖像以達到最佳的成像效果。
(2) 圖像的接收和處理模塊
紅外圖像的接收和處理板卡及芯片采用英國HUNT公司生產(chǎn)的板卡HEPC9和HERON-FPGA3S以及HERON4。HEPC9是一塊母卡,作為HUNT公司各種處理板卡的載體,采用環(huán)形的HEART總線來規(guī)劃各個模塊的通訊功能,通過PCI總線與主機通訊。HERON-FPGA3S是一塊FPGA板卡,用于解析紅外攝像儀的電平信號和接收紅外圖像數(shù)據(jù)。HERON4是TIC6201DSP板卡,負責(zé)對紅外弱小目標的檢測和識別。另外還需要一個由多個MC3486組成的板卡模塊將紅外攝像儀的RS422差分信號轉(zhuǎn)換為TTL單端信號。
(3) 系統(tǒng)控制和顯示模塊
整個系統(tǒng)的控制和顯示部分由PC機完成,這里使用ADLINK公司的工控機PENTIUM Ⅲ 866,內(nèi)存128MB。
2 各子模塊具體實現(xiàn)
2.1 Hunt Engineering 產(chǎn)品簡介[8]
(1)母卡HEPC9
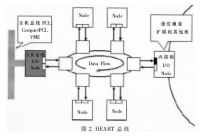
HEPC9是一個可以集成4個HERON模塊的主板卡,各個模塊之間的連接關(guān)系是可編程的,具體由network文件規(guī)定。母卡具有6個32bit的同步虛擬輸入FIFO,6個32bit的同步虛擬輸出FIFO,模塊之間通過這些虛擬的FIFO進行連接。虛擬FIFO是母卡中環(huán)形HEART總線的一部分,如圖2所示,通過令牌環(huán)(標志位)的設(shè)置分配數(shù)據(jù)的傳輸帶寬和時間片,這部分功能對于用戶是透明的。每個FIFO的同步時鐘可以達到60M~100MHz,使FIFO的輸入輸出速度可以達到4×100MBps。
?
(2)HERON-FPGA3S
HERON-FPGA3S可編程邏輯芯片在系統(tǒng)中用于接收紅外攝像儀圖像數(shù)據(jù),并具有存儲功能。具有200K門,最大時鐘頻率可達180MHz,I/O帶寬達400MBps。
(3)HERON4-DSPC6201
這是一塊基于TI公司TIC6201DSP的HERON系列的板卡,具有200MHz主頻的16位定點DSP,采用哈佛結(jié)構(gòu),具有64KB的片內(nèi)程序存儲器PROM和64KB的片內(nèi)數(shù)據(jù)存儲器IDRAM。HERON4-DSP板卡增加了512KB的片外突發(fā)存儲器SBSRAM和16MB的片外動態(tài)數(shù)據(jù)存儲器SDRAM。DSP具有八條流水線,可以使指令并行執(zhí)行,這對于大數(shù)據(jù)量的圖像處理非常重要。
2.2 系統(tǒng)的邏輯構(gòu)成
實時紅外圖像處理系統(tǒng)在邏輯上要完成一個完整的數(shù)據(jù)傳輸、處理、顯示過程。其邏輯構(gòu)成如圖3所示。
?
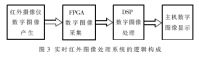
母卡通過編寫network文件下載到母卡的存儲器中,修改特定的標志寄存器,實現(xiàn)拓撲連接方式。這里的兩片DSP采用流水線處理方式,即兩者協(xié)同完成同一圖像處理工作的先后兩部分,以提高處理速度。在一些情況下,也可以將兩塊DSP描采取并行處理的方式,即兩塊DSP同時處理不同的數(shù)據(jù)。
(1)FPGA圖像數(shù)據(jù)的采集模塊
紅外攝像儀的邏輯時序如圖4所示。圖中:幀控信號FRAME高電平有效,在FRAME信號上升沿后出現(xiàn)第一幀數(shù)據(jù)時鐘;行控信號LINE_VALID上升沿有效,在其上升沿后每行數(shù)據(jù)有效,則時鐘信號CLOCK上升沿像素信息有效;數(shù)據(jù)信號PIXEL_DATA共有14對數(shù)據(jù)線,產(chǎn)生14位數(shù)據(jù),每行有320個時鐘,每幀有240行,一幀總共具有320×240=76 800個14bit的有效像素信息。

(2) DSP數(shù)字圖像處理模塊
這是整個系統(tǒng)的核心模塊,其功能是利用采集到的圖像數(shù)據(jù)進行數(shù)字圖像的處理。
利用HUNT公司的嵌入式模塊“Create New HREON-API project”,可以建立一個完整的基于以上硬件結(jié)構(gòu)的系統(tǒng)程序框架。該軟件框架基于TIDSP的DSP/BIOS結(jié)構(gòu),是一種小型的嵌入式實時操作系統(tǒng),可以對DSP系統(tǒng)的各種資源(如內(nèi)存、信號量等)進行規(guī)劃管理。本系統(tǒng)中DSP圖像處理模塊的整體框圖如圖5所示。
?

通過FPGA上的標志寄存器協(xié)調(diào)DSP和FPGA之間的通訊,在準備接收圖像數(shù)據(jù)之前,清空接收FIFO,然后通過串口HSB使能FPGA的發(fā)送允許標志位通知FPGA發(fā)送數(shù)據(jù)。在接收圖像到幀存之后,同樣通過HSB設(shè)置這個標志使FPGA停止發(fā)送。
(3)主機控制顯示模塊
這部分是運行于PC機上的程序。其作用是完成整個系統(tǒng)的控制模塊和顯示模塊功能。
紅外攝像儀所拍攝的數(shù)字圖像具有14位的像素精度,雖然是有利于圖像處理精度,但由于無法在一般的顯卡上顯示超過256級灰度的灰度圖像,因此有必要采用先灰度均衡再線性映射的方法,將14位的高精度圖像壓縮為8位的灰度圖來顯示,以達到人機界面顯示的功能。
3 弱小目標檢測跟蹤及在DSP上的實現(xiàn)
紅外序列圖像中運動的弱小目標的檢測算法包括形態(tài)學(xué)濾波和能量特征匹配兩部分,即基于能量特征的弱小目標檢測方法。同時還包括利用數(shù)據(jù)關(guān)聯(lián)進行多幀積累實現(xiàn)的序列圖像跟蹤,從而實現(xiàn)了對低信噪比的復(fù)雜序列圖像的實時、有效的檢測和跟蹤[4]。
在實時紅外圖像處理系統(tǒng)中,由于圖像數(shù)據(jù)量大,數(shù)據(jù)間相關(guān)性高,需要滿足嚴格的實時性要求,因此需要對圖像處理算法及程序進行基于數(shù)字信號處理器(DSP)的優(yōu)化編程,從而大大提高算法的運行速度,來滿足系統(tǒng)的實時性能。TI公司的C6x系列DSP[5],具有很高的運算速度和良好的優(yōu)化結(jié)構(gòu),完全可以滿足圖像的實時處理要求。
3.1 算法結(jié)構(gòu)的優(yōu)化
算法結(jié)構(gòu)的優(yōu)化方法針對具體的處理算法具有特殊性,這部分的優(yōu)化與DSP的結(jié)構(gòu)沒有關(guān)系,優(yōu)化的目的是使算法本身具有良好的時間空間復(fù)雜度和簡單的邏輯結(jié)構(gòu)。如在圖像處理中,通常要實現(xiàn)一個NX-N的二維數(shù)字濾波。在不做任何優(yōu)化的情況下,得到一個結(jié)果要進行N2+l次內(nèi)存讀寫,內(nèi)存操作耗時長,需要占用專用的功能單元,因而成為功能提高的瓶頸。因此通常對該二維模板進行線形化,即先對源圖進行一個N×1的一維濾波,再對中間結(jié)果圖也進行N×1的一維濾波,從而得到最終的結(jié)果圖。這樣只需要進行 2(N+1)次內(nèi)存讀寫操作就可以得到一個結(jié)果。當N比較大時(如11×11高斯平滑),程序的性能有明顯提高。
3.2 DSP程序的結(jié)構(gòu)優(yōu)化
DSP的內(nèi)部結(jié)構(gòu)具有特殊性,如果程序的編寫能夠在一定程度上與DSP的結(jié)構(gòu)相適應(yīng),利用C編譯器的優(yōu)化功能就可以在程序級的基礎(chǔ)上大大提高算法的性能[4~8]。具體如下:
?(1) 盡量使用int 類型中間變量
在圖像處理程序中,數(shù)據(jù)通常為8bit的變量,而C6XDSP的內(nèi)部寄存器和數(shù)據(jù)通道為32bit,在圖像處理的濾波、卷積等過程中,需要較多的中間變量,如果采用8bit的中間變量存儲方式,勢必迫使編譯器使用額外的數(shù)據(jù)調(diào)整指令,因此采用32bit的中間變量具有最好的效率。
?(2) 使用移位代替除法運算
①DSP中的移位運算具有硬件支持,由一條指令完成,而除法運算使用程序?qū)崿F(xiàn),比較復(fù)雜耗時。
②DSP的浮點運算往往采用調(diào)用子函數(shù)方法,效率低,編譯器無法進行軟件流水優(yōu)化,而采用移位運算可以代替一些定值的浮點運算,如:
for(I=0;I<1000;I++)???????? ?for(I=0;I<1000;I++)
{??????????????????????? ??{
?b+=35*0.325;????????????? ?b+=((35*333)>>10);
}??????????????????????? ??}
以上兩條程序完成同樣的功能,但是第一條含有浮點數(shù)的乘法,運行時間為222 775;第二條只有定點數(shù)的乘法和移位運算,運行時間僅為881,可見效率差距非常大。
?(3) 使用C6x內(nèi)聯(lián)函數(shù)
C6x編譯器內(nèi)部提供了許多指令,可以在單周期內(nèi)完成許多復(fù)雜的函數(shù)功能,從而提高了代碼的運行速度。如:
?“飽和加法”:
int sadd(int a, int b)
{
int result;
result = a + b;
if (((a ^ b) & 0x80000000) == 0)
{
if ((result ^ a) & 0x80000000)
{
result = (a < 0) ? 0x80000000 : 0x7fffffff;
}
}
return (result);
}
這樣一個復(fù)雜的算法可以用一條內(nèi)聯(lián)函數(shù)_sadd( a,b)實現(xiàn)。
?(4) 使用32bit數(shù)據(jù)類型訪問16bit數(shù)據(jù)
由于C6x系列DSP具有32位的寄存器和內(nèi)部通道,在操作16bit的數(shù)據(jù)如short類型時,往往浪費一半的寄存器空間和通道帶寬。為了充分利用這些資源,編譯器設(shè)置了一些內(nèi)聯(lián)函數(shù)同時對兩個16bit的數(shù)據(jù)進行操作,如_add2、_sub2。
short in1[]、 short in2[] 是兩個short類型的數(shù)組,具有N項,以下是將兩者對應(yīng)項相加的操作。
for (i = 0; i < (N/2); i++)
_amem4(&sum[i]) = add2(_amem4_const(&in1[i]), _amem4_const(&in2[i]));
程序中,_amem4_const、_amem4將in1、in2和sum進行了32bit的對齊操作,然后同時進行兩個short數(shù)據(jù)的加法運算和讀取存儲運算,從而提高了運算效率。
?(5) 使用restrict關(guān)鍵字消除內(nèi)存關(guān)聯(lián)
為提高代碼效率,C6x編譯器總是盡可能多地安排指令并行,而指令能否并行取決于指令之間的相關(guān)性。對于編譯器而言,內(nèi)存讀寫指令之間是否獨立是很難判斷的,如下列程序:
void vecsum(short *sum, short *in1, short *in2, unsigned int N)
{
int i;
for (i = 0; i < N; i++)
sum[i] = in1[i] + in2[i];
}
程序中,sum的存儲對于in1、in2的讀取地址產(chǎn)生影響,只有等到sum存儲完畢以后,才可以再次進行in1、in2的讀取操作。這個問題叫做“別名問題”,因為sum可能和in1是一個地址,使其無法將讀取數(shù)據(jù)和寫結(jié)果的操作并行起來。
為了讓編譯器放心地將讀取源數(shù)據(jù)和寫結(jié)果數(shù)據(jù)兩者并行操作,可以利用restrict變量申明當前數(shù)組名(或指針)是指向這段內(nèi)存的惟一變量,如下列程序所示:
void vecsum(short *sum, short * restrict? in1, short * restrict in2, unsigned int N)
{
int i;
for (i = 0; i < N; i++)
sum[i] = in1[i] + in2[i];
}
這樣就可以消除以上的內(nèi)存相關(guān)性,提高流水線效率。
?(6) 軟件流水優(yōu)化
在程序的優(yōu)化中,循環(huán)部分往往是最耗時的步驟,軟件流水就是一種用來優(yōu)化循環(huán)步驟的,使其循環(huán)內(nèi)部的指令盡可能地并行執(zhí)行。在C6201編譯器中選擇-o2或者-o3開關(guān)就可以打開編譯器的軟件流水優(yōu)化功能。
形成軟件流水的有效方法:在編譯器選項中選定了-o2或者-o3選項,編譯器就可以自動作出軟件流水的優(yōu)化。形成高效的軟件流水,可以使用MUST_ITERATE給定循環(huán)變量信息和循環(huán)展開。形成軟件流水應(yīng)避免:①軟件流水優(yōu)化只在最內(nèi)層循環(huán)進行。②循環(huán)體內(nèi)部代碼太多。③循環(huán)體內(nèi)部代碼太復(fù)雜。
在定點DSP中,浮點數(shù)的運算都是用子函數(shù)軟件實現(xiàn)的,所以在定點DSP的程序循環(huán)中,如果由浮點數(shù)運算,就無法形成軟件流水。解決的方法是手工進行浮點數(shù)的定標工作。對于已經(jīng)確定操作數(shù)的浮點運算,如果運算結(jié)果可以是整數(shù),就可以使用乘法加移位的方法實現(xiàn)乘除運算。如35×0.25可以轉(zhuǎn)化成(35×1)>>2。
4 系統(tǒng)測試
本實驗采用法國Sofradir中波熱成像儀采集到的320×240像素6733幀8位真實紅外對空序列圖像,截取其中的100幀數(shù)據(jù)驗證能量匹配濾波檢測與數(shù)據(jù)關(guān)聯(lián)跟蹤算法的適用性。由于目標很遠,此時的信噪比小于2,屬于典型的強雜波環(huán)境下的弱小目標檢測問題。實拍紅外圖像的顯示如圖6所示。
?
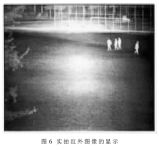
本文介紹的系統(tǒng)成功實現(xiàn)了弱小目標檢測和跟蹤程序的移植和優(yōu)化。針對紅外弱小目標檢測和跟蹤的實時測試表明:該系統(tǒng)實時和有效檢測跟蹤了每秒50幀,每幀320×240像素,每像素14位的低信噪比的復(fù)雜序列圖像。
參考文獻
[1]?BRUNO M S, MOURA J F. Multiframe detector/tracker:optimal performance, IEEE Trans. AES, 2001,37(3):925.
[2] ?TZANNES A P, BROOKS D H. Point target detection in?IR image sequences: A hypothesis testing approach based?on target and clutter temporal profile modeling. Optical?Engineering, 2000,38(2):2270-2278.
[3] ?TZANNES A P, BROOKS D H. Detecting small moving?objects using temporal hypothesis testing. IEEE Trans.
?AES, 2002,38(2):570-585.
[4] ?田元,葉秀清.實時圖像處理中的DSP優(yōu)化編程,電子技術(shù),2000,(10):43-46.
[5] ?Texas Instruments Incorporated.TMS320C6000 Programmer’s?Guide, 2001.
[6] ?Texas Instruments Incorporated. TMS320C6000 optimizing?compiler user’s guide, 2001.
[7] ?徐盛. TMS320C6201數(shù)字信號處理器在圖像處理中的應(yīng)用.電子技術(shù)應(yīng)用,1999,25(1).
[8] ?WAMES P. Hunt Engineering Incorporated. Developing a?complex real time system with HERON and HEART Rev1.0.?2002.