
1 引言
紅外遙控是目前常用的一種通信和遙控方法,紅外遙控裝置具有體積小、功耗低、功能強(qiáng)、成本低等特點(diǎn),因而其廣泛應(yīng)用于各種家電產(chǎn)品、金融和商用設(shè)施,以及工業(yè)設(shè)備中。但是各種產(chǎn)品的遙控并不能互相兼容,本文介紹一種利用單片機(jī)設(shè)計(jì)通用自學(xué)習(xí)型紅外遙控的方法,可以實(shí)現(xiàn)對(duì)多種產(chǎn)品紅外線遙控。本裝置采用了最小化模式設(shè)計(jì),電路簡(jiǎn)單,可靠性高,此技術(shù)應(yīng)用于我們開(kāi)發(fā)的多媒體中央控制器產(chǎn)品中,獲得了令人滿意的效果。該方案可以還可應(yīng)用于自學(xué)習(xí)萬(wàn)能遙控器和智能家庭集中控制器等設(shè)備。
2 紅外遙控原理
一般的紅外遙控系統(tǒng)由紅外遙控信號(hào)發(fā)射器、紅外遙控信號(hào)接收器、微處理器和外圍電路構(gòu)成的。當(dāng)遙控器的某個(gè)按鍵按下,其內(nèi)部的信號(hào)發(fā)射器產(chǎn)生遙控編碼脈沖,由紅外發(fā)射管串行輸出,遙控接收模塊型號(hào)1838 完成對(duì)遙控信號(hào)的接收、放大、檢波、整形、解調(diào)出遙控編碼脈沖,遙控編碼脈沖是一組串行二進(jìn)制編碼,對(duì)于一般的紅外遙控系統(tǒng),此串行輸入到微控制器,由其內(nèi)部完成遙控指令解碼,并執(zhí)行相應(yīng)的遙控功能。
3 一般紅外遙控信號(hào)編碼脈沖的波形
紅外遙控器發(fā)射的遙控編碼脈沖,由前導(dǎo)碼、系統(tǒng)碼、功能碼、功能碼的反碼組成
如圖1 所示
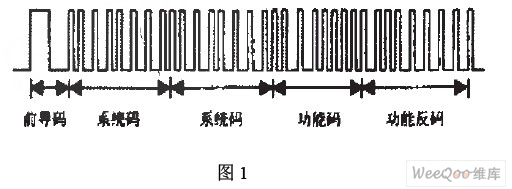
前導(dǎo)碼是一個(gè)遙控碼的起始部分,由一個(gè)高電平和一個(gè)低電平組成。作為接受數(shù)據(jù)的準(zhǔn)備脈沖,這些編碼是經(jīng)38 kHz 的載波脈寬調(diào)制后發(fā)射出去。
通過(guò)分析大量不同類型的紅外遙控碼波形,遙控碼的數(shù)據(jù)幀間歇寬度均為10ms以上,前導(dǎo)碼的高電平均為5ms以上,通常為9ms左右,編碼位在10us和5ms之間,在本設(shè)計(jì)中只考慮遙控器發(fā)射信號(hào)的高低電平寬度,不考慮其編碼方式,以簡(jiǎn)化設(shè)計(jì)。
4 系統(tǒng)硬件電路的設(shè)計(jì)
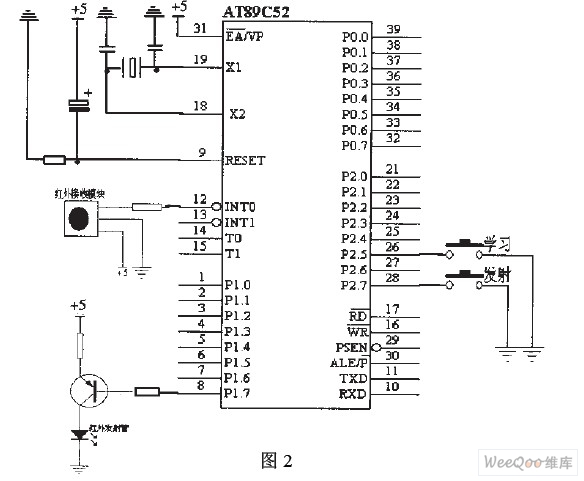
圖2 單鍵通用學(xué)習(xí)型遙控器原理圖
考慮到有的遙控器的編碼比較長(zhǎng),需要比較多的內(nèi)部RAM,單片機(jī)采用了 AT89C52 P2.5 口接學(xué)習(xí)按鍵,P2.7口接發(fā)射按鍵,P1.7 口用于作為遙控碼的輸出口,輸出38 kHz 的遙控碼,INT0口用于紅外線接收頭的輸出信號(hào)的輸入。
5 系統(tǒng)主要程序的設(shè)計(jì)
5.1 主程序如圖3
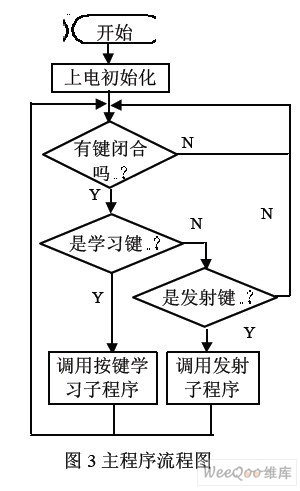
上電復(fù)位后,主程序掃描按鍵,當(dāng)確認(rèn)有按鍵按下時(shí),若是學(xué)習(xí)鍵,則進(jìn)入學(xué)習(xí)狀態(tài);若是發(fā)射鍵,則將已學(xué)習(xí)的遙控編碼脈沖發(fā)射出去。
5.2 遙控編碼學(xué)習(xí)子程序
該程序?qū)崿F(xiàn)遙控前導(dǎo)碼的識(shí)別,遙控編碼高低電平寬度計(jì)時(shí)和結(jié)束位識(shí)別功能,程序流程如圖4 所示。
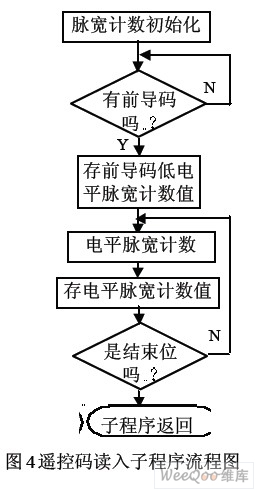
在設(shè)計(jì)中,采用了計(jì)數(shù)器對(duì)信號(hào)高低電平計(jì)時(shí)的方法來(lái)采集數(shù)據(jù)并保存。前導(dǎo)碼由一個(gè)9ms左右的高電平和一個(gè)低電平組成的,判斷是否是前導(dǎo)碼的方法是:判斷開(kāi)始的高電平是否大于5ms。如果大于5ms的話,就認(rèn)為是前導(dǎo)碼,并保存前導(dǎo)碼的低電平。然后依次保存采集到的編碼信號(hào),如果采集到編碼信號(hào)的高電平大于5ms的話,就認(rèn)為是編碼已經(jīng)結(jié)束,置0 作為標(biāo)志學(xué)習(xí)子程序結(jié)束。
5.3 遙控編碼發(fā)射子程序
由軟件實(shí)現(xiàn)遙控信號(hào)的載波合成,用定時(shí)中斷1產(chǎn)生38kHz的載波信號(hào)用,定時(shí)中斷0控制定時(shí)中斷1的開(kāi)關(guān),定時(shí)器0定時(shí)長(zhǎng)短由相應(yīng)的遙控信號(hào)電平寬度計(jì)數(shù)值確定。如果需發(fā)射的遙控信號(hào)為高電平時(shí),關(guān)定時(shí)中斷1;如果為低電平,則開(kāi)定時(shí)中斷1,輸出38kHz載波信號(hào)到紅外發(fā)射控制腳P1.7,從而實(shí)現(xiàn)遙控信號(hào)的脈寬調(diào)制發(fā)射。
6 結(jié)語(yǔ)
在本設(shè)計(jì)中,采用了不考慮紅外信號(hào)的編碼方式,只采集其高低電平寬度的方法,使得可采集各種編碼方式的信號(hào)發(fā)射時(shí),不是用硬件,而是采用以軟件方式產(chǎn)生載波的方法。節(jié)約了硬件設(shè)備,并使電路簡(jiǎn)化。本設(shè)計(jì)非常簡(jiǎn)單地實(shí)現(xiàn)了紅外遙控信號(hào)的接收和轉(zhuǎn)發(fā),本設(shè)計(jì)的裝置已用于多媒體中央控制器產(chǎn)品中對(duì)多媒體電子產(chǎn)品進(jìn)行紅外控制操作,在實(shí)際應(yīng)用過(guò)程中獲得了滿意的效果,該裝置還可應(yīng)用智能家居產(chǎn)品中對(duì)空調(diào)電動(dòng)窗簾燈光音響等電器設(shè)備進(jìn)行控制。