
1熱釋電傳感器及其探測原理
1.1PIR(Pyroelectric infrared Sensor)簡介
熱釋電傳感器是一種新型被動紅外探測元件,由鐵電介質(zhì)材料制成,輻射加熱作用使材料自發(fā)極化強(qiáng)度變化。溫度升高,極化強(qiáng)度降低,相當(dāng)于釋放出一部分電荷。制備熱釋電傳感器的鐵電材料有:硫酸三甘肽(TGS)、鈮酸鍶鋇(SBN)和鈦酸鉛(PbTiO3)等。熱釋電傳感器內(nèi)有兩個關(guān)鍵性的元件:(1)熱釋電紅外感應(yīng)單元(PIR Unit),能將波長為8~12μm之間的紅外信號變化轉(zhuǎn)變?yōu)殡娦盘枺⒛軐ψ匀唤缰械陌坠庑盘柧哂幸种谱饔谩#?)菲涅爾透鏡組(Fresnel Lens Array),是由若干個Fresnel Lens組成。菲涅爾透鏡包括兩種形式,即折射式和反射式,有兩個作用:①聚焦作用,將熱釋的紅外信號折射(或反射)在PIR上;②通過區(qū)域性遮斷技術(shù)將警戒區(qū)內(nèi)分為若干個明區(qū)和暗區(qū),使進(jìn)入警戒區(qū)的移動物體能以溫度變化的形式在PIR上產(chǎn)生變化熱釋電紅外信號,這樣PIR就能產(chǎn)生變化的電信號。
1.2探測原理[1]
熱釋電傳感器是利用目標(biāo)物體所發(fā)出的紅外輻射信號實現(xiàn)被動探測的,目標(biāo)物體輻射能量的大小與物體絕對溫度有關(guān),其關(guān)系遵循普朗克定律,關(guān)系式為:
Wλ=2πhc2[λ5(ehc/kT-1)]-1(1)
式中 h為plank常數(shù)(6.626×10-34Js);c為光速(2.9979×108m/s);T為絕對黑體的溫度(K);λ為波長;K為Bolzman常數(shù)(1.38110-21J/K)。Wλ為絕對黑體的光譜輻射發(fā)射量,由(1)式,可知:
(1)目標(biāo)物體的輻射能量隨溫度的升高而增大;
(2)隨著溫度的升高,物體輻射能量的峰值向短波方向移動,其變化符合維恩定律,即:λpT=2897.8,λp為峰值時紅外線波長;
(3)相同溫度下,不同目標(biāo)物體的輻射能量是不同的。
1.3信號調(diào)理電路
由于熱釋電傳感器輸出信號頻率和幅度比較低,易受外界環(huán)境的影響產(chǎn)生干擾,除了設(shè)置抗干擾電路外,選用放大器時應(yīng)選低噪聲、低漂移、低功耗、具有溫度補(bǔ)償?shù)母咴鲆婢苓\(yùn)算放大器,實際電路見圖1。
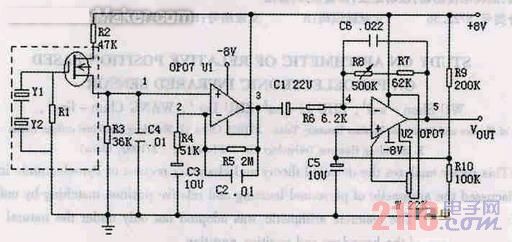
圖1熱釋電傳感器與信號調(diào)理電路實際連接圖
熱釋電傳感器的輸出信號直流電平為1V,幅度為1mV的交變信號,該信號通過熱釋電傳感器內(nèi)部場效應(yīng)管的源極輸出,即圖1中的節(jié)點1。第一級運(yùn)算放大器(U1)是低頻小信號放大電路,輸出節(jié)點為3。第二級運(yùn)算放大器(U2)為具有微分補(bǔ)償電路的直流放大電路,由元件C1、R6、R7、R8和U2組成,輸出電壓V3波形如圖2。
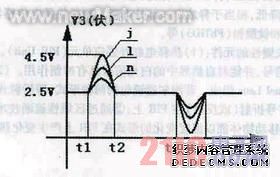
圖2信號調(diào)理電路輸出電壓波形
圖中t1~t2之間的曲線表示當(dāng)人員進(jìn)入傳感器時波形變化情況,t2~t3之間的曲線表示當(dāng)人員在傳感器內(nèi)部時波形變化情況,t3~t4之間的曲線表示當(dāng)人退出傳感器時的波形變化情況。從波形的變化可以看出:當(dāng)人員進(jìn)入傳感器時,在直流電平2.5V的基礎(chǔ)上迭加了一個正的電壓波形,而退出時,迭加了負(fù)的電壓波形,由此得出結(jié)論:人員進(jìn)入時信號幅度正向增大,而退出時信號幅度間反向增大,該結(jié)論作為人員定位與移動相對位置匹配算法的判定依據(jù)。
2位置相關(guān)算法
2.1算法的設(shè)計思想
定位軟件是指通過特定的算法確定人員具體位置的軟件,從而確定是否進(jìn)行預(yù)報警或者報警,若預(yù)報警,則單片機(jī)發(fā)送預(yù)報警指令,進(jìn)行聲光報警;如報警,除了啟動聲光報警裝置外,同時應(yīng)將大型機(jī)械停車,以確保人員安全。為此,算法設(shè)計的關(guān)鍵是將探測區(qū)域進(jìn)行合理的劃分。
2.2算法的具體實現(xiàn)
圖3是由三個熱釋電傳感器輻射區(qū)域交叉組成的平面結(jié)構(gòu)圖。三個傳感器輻射區(qū)域兩兩相交,共分為8個區(qū)域,將這些區(qū)域劃分為安全區(qū)、預(yù)報警區(qū)和報警區(qū)。其中1、2、3、4、6、7為預(yù)報警區(qū),5為危險區(qū),若有人進(jìn)入該區(qū)則報警并輸出閉鎖控制信號,使轉(zhuǎn)載機(jī)停車。
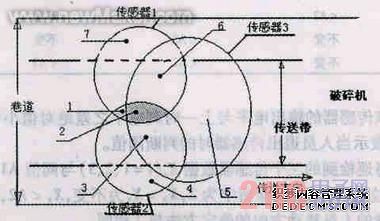
圖3三個傳感器輻射交叉平面結(jié)構(gòu)圖
2.2.1具體數(shù)據(jù)格式
前一時刻的位置表示人員上一時刻在探測范圍內(nèi)的具體位置,作為移動方向判定的基本依據(jù);傳感器1、傳感器2和傳感器3表示三個傳感器檢測信號經(jīng)A/D轉(zhuǎn)換后的數(shù)值;PLAST為上一時刻人員的位置(0~7),稱之為保留字,初值為0,表示人員在報警區(qū)以外的安全位置。②X=[ X1,X2,X3]。XK表示人進(jìn)入(或者退出)由K號傳感器所確定的平面區(qū)域時,傳感器的檢測信號經(jīng)過模數(shù)轉(zhuǎn)換后的值,它的范圍為00~FFH,對應(yīng)模擬量0~5V。設(shè)無人進(jìn)出時,信號調(diào)理電路的輸出直流電平為2.5V,但是由于環(huán)境噪聲的存在(如:氣流的變化、濕度的變化、大型機(jī)械的的開停等),信號調(diào)理電路的輸出信號迭加了一定的噪聲電平△A,總輸出為2.5+△A,△A可正可負(fù),它的值可通過單片機(jī)學(xué)習(xí)功能得到。
2.2.2函數(shù)關(guān)系
通過分析我們發(fā)現(xiàn):圖3中每個具體位置是由不同傳感器所包圍形成的,人員從不同位置移向另一位置時,相應(yīng)傳感器測得的數(shù)據(jù)會發(fā)生較大變化,而其它傳感器的數(shù)據(jù)變化小于某個值△k。即:人員的位置(Position)由上一時刻人員的位置PLAST和該時刻三個傳感器的電平經(jīng)A/D轉(zhuǎn)換后的數(shù)值X(X1、X2和X3)確定,并且給定PLAST和X(X1,X2,X3),可唯一確定Position,他們之間滿足下列函數(shù)關(guān)系式:
Position=f(PLAST,X)
2.2.3數(shù)據(jù)存儲
由函數(shù)關(guān)系的討論可知,人員的當(dāng)前位置與前時刻的位置及當(dāng)前傳感器測得的數(shù)據(jù)有關(guān)。為了描述方便,我們稱人員前時刻的位置為“保留字”,當(dāng)前傳感器檢測值與閾值的比較稱為“判斷條件”,人員前時刻的位置和當(dāng)前判斷條件存儲在外部的非遺失性存儲器中,數(shù)據(jù)存儲形式為鄰接表,表頭為0~7保留字,共計8個位置,表的其它內(nèi)容為從該位置移動到相應(yīng)位置的變化條件,即傳感器檢測信號的變化情況。以保留字2為例,與其相鄰的位置為1、3、4、5、6和7,具體確定方法見圖3。當(dāng)傳感器的輸出變化情況發(fā)生改變時,人員的移動方向和位置是不同的,與保留字2相鄰的位置和條件對應(yīng)關(guān)系見表2。與其它保留字相鄰的位置和條件的對應(yīng)關(guān)系確定方法與表2相同。
表2與保留字2相鄰的位置和條件對應(yīng)關(guān)系

表2中,“不變”是指該傳感器的輸出電平與上一時刻電平之差絕對值小于△K;A1表示當(dāng)人員進(jìn)入傳感器時的判斷閾值;A2表示當(dāng)人員退出傳感器時的判斷閾值。
2.2.4具體定位方法
將巡檢到的三個傳感器數(shù)據(jù)Xi(i=1、2、3)與閾值A(chǔ)1和A2比較,據(jù)保留字和比較結(jié)果可判斷人員的當(dāng)前位置。比如:設(shè)保留字為2,X2=X3為不變,X3
4結(jié)束語
利用三個熱釋電傳感器實現(xiàn)了人員定位算法,即位置相關(guān)算法,適當(dāng)增加檢測的傳感器數(shù)量,可提高檢測精度和準(zhǔn)確度,但算法會變得很復(fù)雜,該算法不僅適合于煤礦環(huán)境的人員定位,而且也適用于其它需要界位劃分的場合。算法的實現(xiàn)是推動被動定位技術(shù)發(fā)展的一個重要補(bǔ)充和探索。獨特的傳感器系統(tǒng)結(jié)構(gòu)設(shè)計,可任意調(diào)整探測距離和范圍,具有較大的靈活性。利用該算法實現(xiàn)的人員安全保護(hù)系統(tǒng)已在煤礦生產(chǎn)中得到了廣泛應(yīng)用。