
0 引言
CAN-bus(Controller Area Network)即控制" title="控制">控制器局域網(wǎng)是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。最初CAN-bus被設(shè)計作為汽車環(huán)境中的微控制器通訊工具,用于在車載各電子控制裝置ECU之間交換信息,從而形成汽車電子控制網(wǎng)絡(luò)。如今,CAN-bus作為一種技術(shù)先進、可靠性高、功能完善、成本合理的遠程網(wǎng)絡(luò)通訊控制方式,已被廣泛應(yīng)用到各個自動化控制系統(tǒng)中。而且CAN-bus總線在通信能力、可靠性、實時性、靈活性、易用性、傳輸距離等方面較RS-485總線有著明顯的優(yōu)勢。因而用CAN總線" title="CAN總線">CAN總線取代RS-485總線將是大勢所趨。
1 CAN總線的主要特性
CAN總線與其它通信網(wǎng)的不同之處有二:一是報文傳送中不包含目標地址,它是以全網(wǎng)廣播為基礎(chǔ),各接收站根據(jù)報文中反映數(shù)據(jù)性質(zhì)的標識符來過濾報文,該收的收下,不該收的棄而不用。其好處是可在線上網(wǎng)下網(wǎng)、即插即用和多站接收;二是特別強化數(shù)據(jù)安全,可滿足控制系統(tǒng)及其它較高數(shù)據(jù)要求的系統(tǒng)需求。CAN具有以下主要技術(shù)特性:
(1)CAN遵從ISO模型,采用了其中的物理層、數(shù)據(jù)鏈路層與應(yīng)用層。采用雙絞線,通信速率最高可達到1 Mbps/40 m,直接傳輸距離最遠可達10 kin/5 kbps。同一段總線內(nèi)最多可掛接110個設(shè)備。
(2)CAN的信號傳輸采用短幀結(jié)構(gòu),每一幀有效字節(jié)數(shù)為8個。因而傳輸時間短,受干擾的概率低。當(dāng)節(jié)點發(fā)生嚴重錯誤時,CAN可自動關(guān)閉該節(jié)點,同時切斷與總線的聯(lián)系,以使總線上其它節(jié)點不受影響,因此CAN總線具有很強的抗干擾能力。
(3)CAN可支持多主工作方式,網(wǎng)絡(luò)上任一節(jié)點在任何時候均可主動向其它節(jié)點發(fā)送信息,同時也支持點對點、一點對多點和全局廣播方式來接收/發(fā)送數(shù)據(jù)。處于優(yōu)先級低的節(jié)點會主動停止發(fā)送,以此來避免總線沖突。
2 CAN總線接口硬件電路的設(shè)計
硬件電路的設(shè)計主要是CAN通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設(shè)計。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議,而CAN總線收發(fā)器的主要功能是增大通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低射頻干擾(RFI),實現(xiàn)熱防護等。
2.1 CAN總線接口電路
SJA1000" title="SJA1000">SJA1000硬件接口原理圖如圖l所示。圖中,CAN總線控制器SJA1000的ADO-AD7連接到AT89C51的P0口。片選端CS取反后連接到AT89C51的P2.7,當(dāng)P2.7為1時,CPU片外存儲器地址可選中SJA1000。CPU通過這些地址可對SJA1000執(zhí)行相應(yīng)的讀/寫操作(即:SJA1000首地址為8000H)。SJA1000的RD、WR、ALE分別與AT89C51的對應(yīng)引腳相連。由于SJA1000是低電平復(fù)位,而AT89C51是高電平復(fù)位,所以兩者的復(fù)位端接法不同。另外,當(dāng)SJA1000的11腳MODE接高電平時,可選擇Intel二分頻模式。SJA1000的16腳(INT)是中斷信號輸出端,在中斷允許的情況下,有中斷發(fā)生時,16腳會輸出由高電平到低電平的跳變,因此將AT89C51的外部中斷輸入腳(INT0)與該腳相連接,即可通過中斷方式來訪問SJA1000。為了增強CAN總線節(jié)點的抗干擾能力,本設(shè)計采用SJA1000的具有光電隔離的CAN總線接口。SJA1000的發(fā)送輸出端TX0與接收輸入端RXO、RX1分別經(jīng)高速集成光電耦合器6N137隔離后,與CAN總線接口驅(qū)動芯片82C250的TXD和RXD相連,82C250直接與CAN物理總線相連。CAN總線驅(qū)動器PCA82C250是CAN控制器和物理總線之間的接口,具有可向總線的差動發(fā)送數(shù)據(jù)和CAN控制器的差動接收數(shù)據(jù)的功能。

2.2設(shè)計注意事項
在進行電路設(shè)計時應(yīng)注意以下幾點:
(1)總線兩端必須接兩個終端匹配電阻Rs,若忽略掉它們,會使數(shù)據(jù)通信的抗干擾性及可靠性大大降低。
(3)SJA1000的TX1腳懸空時,RX1引腳的電位必須維持在約0.5Vcc上,否則,將不能形成CAN協(xié)議所要求的電平邏輯。因本系統(tǒng)傳輸距離近,環(huán)境干擾小,可以不用電流隔離,這樣可以直接把82C250的Vref端(約為0.5 Vcc)與SJA1000的RX1相連,從而簡化了電路設(shè)計。
(4)設(shè)計時將SJA1000的CLOCKOUT的時鐘信號接至AT89C51的時鐘電路輸入端,來作為AT89C51的外部時鐘輸入,從而解決了時鐘同步問題:同時將SJA1000中斷輸出信號/INT接至AT89C51的/INT0端,通過中斷方式與AT89C51進行通信。
3系統(tǒng)軟件設(shè)計
系統(tǒng)上電后首先對82C250和SJA1000進行初始化。以確定工作主頻、波特率、輸出特性等,然后通過查詢方式獲取模數(shù)轉(zhuǎn)換采樣值,并把該值通過SJA1000傳送到CAN總線上由上位PC機來進行顯示控制。而對來自CAN總線上的信息則采用中斷方式處理,系統(tǒng)每接收到一幀信息,便產(chǎn)生一次中斷以觸發(fā)微處理器進入中斷模式,然后在中斷服務(wù)程序中讀取該幀信息并傳送到現(xiàn)場。SJA1000的初始化程序如下:
MOV DPTR,#CR:控制寄存器CR的地址送DPTR
MOVA,#01H
MOVX@DPTR,A:進入復(fù)位模式
MOV DPTR,#CDR
MOVA,#00H
MOVX@DPTR,A:選擇BASIC CAN模式、時鐘不輸出
MOV A,#NODECODE
MOVX @DPTR,A;節(jié)點號NODECODE寫入ACR
MOVX DPTR,#AMR
MOV A,#00H
MOV @DPTR,A;AMR置為0,當(dāng)且僅當(dāng)RXID0=ACR時接收數(shù)據(jù)
MOV DPTR,#BTR0;設(shè)定總線時序寄存器BTR0,系統(tǒng)采用12 MHz晶振
MOV A,#85H;分頻后總線時鐘頻率為2MHz
MOVX @DPTR,A;同步跳轉(zhuǎn)寬度為3tscl
MOV DPTR,#BTR1;設(shè)定總線時序寄存器BTR1
MOV A,#OB4H:位同步時間為1個tsc1,采樣開始位置TSEG1=5tsc1
MOVX @DPTR,A;TSEG2=4tsc1,每一位時間10tsc1(200 kHz),每位采樣3次
MOV DPTR,#OCR;設(shè)置輸出控制寄存器
MOV A,#1AH:數(shù)據(jù)從TX0按正常輸出模式同極性輸出
MOV @DPTR,A;TX1不用
MOV DPTR,#CR;初始化完成,使控制器退出復(fù)位模式,進入工作模式工作。
MOV A,#06H
MOV @DPTR,A
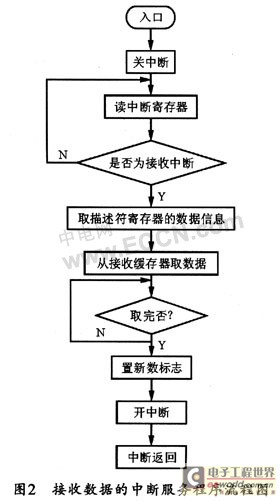
SJA1000在經(jīng)過初始化后便開始接收或發(fā)送數(shù)據(jù),其程序流程分別如圖2和圖3所示。

4結(jié)束語
該接口電路在經(jīng)DP-51H單片機通訊仿真實驗儀的調(diào)試后,結(jié)果表明它能模擬實現(xiàn)通信功能,且其抗干擾性能優(yōu)良,通信速率較高,電路也比較簡單,是開發(fā)與應(yīng)用其它CAN總線產(chǎn)品的基礎(chǔ)。