
引 言
無線傳感器網(wǎng)絡(luò)" title="無線傳感器網(wǎng)絡(luò)">無線傳感器網(wǎng)絡(luò)是目前國內(nèi)外研究的熱點之一,它是由大量廉價的傳感器節(jié)點" title="傳感器節(jié)點">傳感器節(jié)點組成,通過有線/無線通信方式自組織形成的網(wǎng)絡(luò)系統(tǒng),相互協(xié)作地感知周圍的數(shù)據(jù)。由于無線傳感器節(jié)點是一種典型的資源受限的嵌入式系統(tǒng),需要一個微型的操作系統(tǒng)來組織和管理硬件,實現(xiàn)應(yīng)用軟件的功能。TinyOS是美國加州大學(xué)伯克利分校針對無線傳感器網(wǎng)絡(luò)而設(shè)計的一個基于事件驅(qū)動的微型操作系統(tǒng),最初是用匯編和C語言實現(xiàn)的。由于C語言不能有效、方便地滿足面向傳感器網(wǎng)絡(luò)的應(yīng)用開發(fā),其目標(biāo)代碼比較長,經(jīng)進(jìn)一步研究設(shè)計出了支持組件化" title="組件化">組件化的新型編程語言——nesC。其最大的特點是,將組件化/模塊化思想和基于事件驅(qū)動的執(zhí)行模型相結(jié)合。現(xiàn)TinyOS操作系統(tǒng)和基于TinyOS的應(yīng)用程序都是用nesC語言編寫的,大大提高了應(yīng)用開發(fā)的方便性和應(yīng)用執(zhí)行的可靠性。本文以WSN為背景,通過一個基于TinyOS的燈閃爍實例——Blink,詳細(xì)介紹nesC語言的結(jié)構(gòu)以及用該語言如何實現(xiàn)組件化/模塊化的應(yīng)用程序,為深入研究TinyOS的應(yīng)用開發(fā)提供一種實現(xiàn)方法。
1 nosC語言結(jié)構(gòu)
nesC是C語言的擴展,精通C語言的程序員掌握這種語言相對比較快。與C語言的存儲格式不同,用nesC語言編寫的文件是以“.nc”為后綴。每個nc文件實現(xiàn)一個組件功能(組件化/模塊化)。在nesC程序中,主要定義兩種功能不同的組件——模塊(module)和配件(configuration)。
模塊主要用于描述組件的接口函數(shù)功能以及具體的實現(xiàn)過程,每個模塊的具體執(zhí)行都由4個相關(guān)部分組成:命令函數(shù)、事件函數(shù)、數(shù)據(jù)幀和一組執(zhí)行線程。其中,命令函數(shù)是可直接執(zhí)行,也可調(diào)用底層模塊的命令,但必須有返回值,來表示命令是否完成。返回值有3種可能:成功(見BlinkM.nc代碼部分)、失敗、分步執(zhí)行。事件函數(shù)是由硬件事件觸發(fā)執(zhí)行的,底層模塊的事件函數(shù)跟硬件中斷直接關(guān)聯(lián),包括外部事件、時鐘事件、計數(shù)器事件。一個事件函數(shù)將事件信息放置在自己的數(shù)據(jù)幀中,后通過產(chǎn)生線程、觸發(fā)上層模塊的事件函數(shù)、調(diào)用底層模塊的命令函數(shù)等方式進(jìn)行相應(yīng)處理,因此節(jié)點的硬件事件會觸發(fā)兩條可能的執(zhí)行方向——模塊間向上的事件函數(shù)調(diào)用和模塊間向下的命令函數(shù)調(diào)用。
配件主要是描述組件不同接口的關(guān)系,完成各個組件接口之間的相互連接和調(diào)用。相關(guān)執(zhí)行部分主要包含提供給其他組件的接口和配件要使用的接口的組件接口列表和如何將各個組件接口連接在一起的執(zhí)行連接列表。
模塊和配件的定義格式如下:
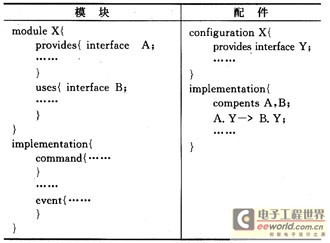
在模塊中,關(guān)鍵字“implementation”必須包含實現(xiàn)模塊提供和使用接口聲明的全部命令和事件。在配件中,關(guān)鍵字“implementation”定義執(zhí)行部分,連接用“->”、“=”、“<-”等符號表示,“->”表示位于左邊的組件接口要調(diào)用位于右邊的組件接口。
不管是模塊還是配件,每個組件都包含了定義和實現(xiàn)兩部分。被提供者和被使用者都是通過調(diào)用接口來實現(xiàn)各個接口的通信和函數(shù)的功能,不同的模塊也可以實現(xiàn)相同的接口。接口可以是命令和事件,也可以是單獨定義的一組命令。在應(yīng)用程序中存在多個配置文件,并且配件之間存在一個層次關(guān)系,最上面的為頂層配件文件(每個應(yīng)用程序必須有一個頂層配件),定義了Main組件接口與其他組件接口的連接方式以及各個接口間的調(diào)用關(guān)系。具體框架圖可參見文獻(xiàn)[6]中的關(guān)于nesC的一般結(jié)構(gòu)。
2 nesC應(yīng)用程序的分析
每一個nesC應(yīng)用程序都是由一個或多個組件通過接口鏈接起來,并通過ncc/gcc編譯生成一個完整的可執(zhí)行程序。下面以TinyOS軟件中的Blink應(yīng)用程序為例,具體介紹nesC應(yīng)用程序結(jié)構(gòu)。
Blink程序是一個簡單的nesC應(yīng)用程序。它的主要功能是每隔1 s的時間間隔亮一次,關(guān)閉系統(tǒng)時紅燈亮。其程序主要包括3個子文件Blink.nc、BlinkM.nc和SingleTimer.nc。
(1)Blink.nc文件
這個文件為整個程序的頂層配件文件,關(guān)鍵字為configuration,通過“->”連接各個對應(yīng)的接口。文件關(guān)鍵內(nèi)容如下:
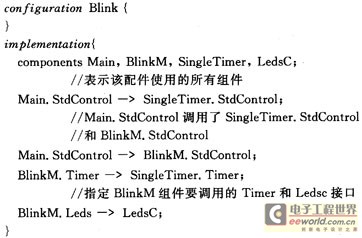
從上述代碼中可看出,該配件使用了Main組件,定義了Main接口和其他組件的調(diào)用關(guān)系,是整個程序的主文件,每個nesC應(yīng)用程序都必須包含一個頂層配置文件。
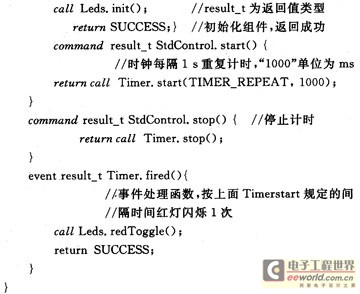
(2)BlinkM.nc文件
BlinkM.nc為模塊文件,關(guān)鍵字為module、command,通過其調(diào)用StdControl接口中的3個命令“init,start,stop”連接接口,是實現(xiàn)Blink程序的具體功能。內(nèi)容如下:

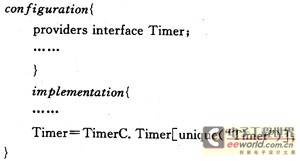
(3)SingleTimer.nc文件
SingleTimer.nc為一個配件文件,主要通過TimerC和StdControl組件接口實現(xiàn)與其他組件之間的調(diào)用關(guān)系,配件文件還定義了一個唯一時間參數(shù)化的接口Timer。下面給出部分偽代碼:
注:程序中斜體字表示nesC語法中所用到的關(guān)鍵字。
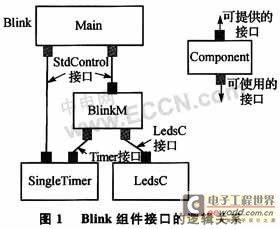
將nesC編寫的配件文件、模塊文件通過接口聯(lián)系起來就形成了圖1所示的Blink組件接口的邏輯關(guān)系。從圖中可清晰地看出在Blink程序中組件之間的調(diào)用關(guān)系,各配件文件(如SingleTimer和LedsC)以層次的形式連接,體現(xiàn)了nesC組件化/模塊化的思想。
3 nesC程序的仿真
關(guān)于nesC應(yīng)用程序的執(zhí)行,在TinyOS上提供了一個可視化圖形仿真器’Tinyviz,觀測TinyOS應(yīng)用程序具體功能的執(zhí)行過程。以TinyOS系統(tǒng)自帶的app應(yīng)用文件Blink程序執(zhí)行過程為例,其他基于TinyOS開發(fā)的應(yīng)用程序軟件調(diào)試、仿真均可用以下執(zhí)行方法。
(1)運行環(huán)境
在PC機上安裝TinyOS的運行平臺,具體安裝過程和安裝Windows系統(tǒng)一樣。
為了避免與pc機自身系統(tǒng)的沖突,可將安裝包tinyos-1.1.0.exe(軟件版本以實際仿真的版本為主,現(xiàn)升級到TinyOS-2.1)安裝到指定路徑(本仿真軟件" title="仿真軟件">仿真軟件環(huán)境是安裝在D:/盤下)。這個安裝包已經(jīng)包含了JAVA、Cygwin,TinyOS相關(guān)軟件和相關(guān)的編譯器,同時提供像mica、micaz等硬件驅(qū)動,針對不同硬件編譯生成可執(zhí)行文件下載。
(2)執(zhí)行步驟
①打開生成的cygwin圖標(biāo)(Linux建立在Windows下的軟件平臺),在光標(biāo)下進(jìn)入仿真環(huán)境路徑(安裝在D盤下):
cygdrive/d/tinyos/cygwin/opt/…/tinyos/sim—尋找軟件仿真路徑。
②輸入make,之后將生成一個執(zhí)行腳本文件Tinyviz.jar。
③進(jìn)入應(yīng)用程序路徑。在相同的路徑下進(jìn)入blink目錄下。
④輸入make pc—在PC機上對Blink程序進(jìn)行編譯、仿真,若有相關(guān)硬件,則輸入硬件名稱,如make micaz,在blink文件下會生成一個pc文件夾,里面包含了在pc機上blink主程序main.exe。
⑤打開blink/pc路徑,輸入:tinyviz - run main.exe10(10為傳感器節(jié)點的仿真?zhèn)€數(shù))。
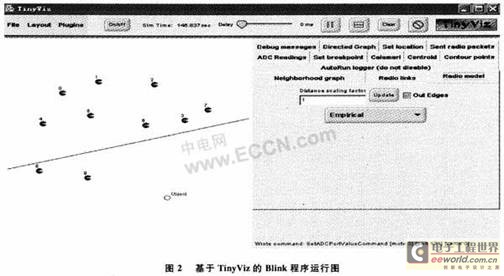
利用可視化Tinyviz將調(diào)用接口使Blink程序執(zhí)行的仿真結(jié)果通過圖形顯示出來,仿真結(jié)果如圖2所示。最上面一層顯示了整個程序仿真時間長度和仿真終止按鍵。圖中每個節(jié)點的位置可以任意布置,仿真間隔時間也能自行設(shè)定。Blink程序的主要功能是每經(jīng)過1 s的時間間隔,每個仿真節(jié)點上紅燈會閃爍1次,如圖中節(jié)點0紅燈是滅的,節(jié)點6紅燈是亮的。該圖很清晰地將NesC編寫的應(yīng)用程序功能仿真出來,對具體代碼的硬件化執(zhí)行提供了實現(xiàn)方法。
4 總 結(jié)
通過對Blink程序的詳細(xì)分析可以看出,用nesC編寫的程序能很好地將組件化/模塊化的思想應(yīng)用到程序中,對于其他nesC應(yīng)用程序編寫也能調(diào)用各組件接口,代碼量少,能快速建立程序中模塊間的鏈接,減少執(zhí)行任務(wù)和事件驅(qū)動時線程間不必要的資源消耗,其具體功能可通過仿真軟件反映出來。掌握nesC的語法,可以大大地降低實現(xiàn)無線傳感器網(wǎng)絡(luò)操作系統(tǒng)和上層的應(yīng)用程序的復(fù)雜度,為深入學(xué)習(xí)與研究TinyOS系統(tǒng)以及其上應(yīng)用程序的設(shè)計提供了參考方法。