
0 引言
微型無人偵察機(jī)的首要任務(wù)是實(shí)現(xiàn)圖像信息的實(shí)時(shí)獲取與無線傳輸。國外對此問題早有研究,但由于技術(shù)的封鎖,目前可供借鑒的資料較少。例如美國研制的“黑寡婦”圖像無線傳輸系統(tǒng),采用調(diào)頻體制,視頻發(fā)射器重1.4 g(占整機(jī)的12%),有效傳輸距離1.5 km。美國桑德斯公司的MicroStar微型飛行器也配備有圖像無線傳輸系統(tǒng),其中攜帶的偵察微型攝像機(jī)重4 g,每秒可拍攝30幀清晰的地面畫面。搭載的PRISM無線電通信信息傳送系統(tǒng),重6g,有效傳輸范圍達(dá)到了5 km。國內(nèi)在該方面的研究起步較晚,技術(shù)相對落后,主要采用模擬傳輸方式,頻率使用率低,系統(tǒng)易受干擾。而研究較成熟的無人機(jī)載圖像實(shí)時(shí)傳輸系統(tǒng),其圖像質(zhì)量指標(biāo)、信道編碼效率等均不高,且抗多徑干擾差。同時(shí),由于微小型飛行器的載重及能量供給非常有限,對機(jī)載部分的功耗、重量、安裝尺寸等都提出了更為嚴(yán)格的要求。因此,開發(fā)適用于微型飛行器的微小攝像與無線傳輸系統(tǒng)尤為重要。本文所研究的主要內(nèi)容以某微型無人偵察機(jī)的需求為背景,提出了一種視頻圖像的無線數(shù)字傳輸方式,該系統(tǒng)具有體積小、功耗低、實(shí)時(shí)性好及傳輸可靠等特點(diǎn)。
1 系統(tǒng)原理
微型無人機(jī)要求提供實(shí)時(shí)、高質(zhì)量的偵察圖像。本文所采用的攝像與無線傳輸系統(tǒng)組成框圖如圖1所示,主要由圖像傳感器、視頻壓縮編碼芯片、微處理芯片、FLASH芯片和SDRAM內(nèi)存以及無線網(wǎng)卡等組成。
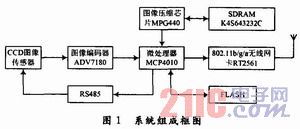
由于受微型無人機(jī)的載荷所限,該系統(tǒng)首先選用重量較輕的高分辨率模擬攝像機(jī)采集視頻信號,然后利用圖像編碼器將采集到的模擬圖像,轉(zhuǎn)化生成分辨率較高的數(shù)字圖像。編碼后的數(shù)字圖像數(shù)據(jù)量巨大,且無線通信信道的帶寬有限,難以保證視頻圖像的實(shí)時(shí)傳輸,因此需要對數(shù)字視頻圖像進(jìn)行編碼壓縮,在保證一定畫質(zhì)的前提下盡可能減少數(shù)據(jù)量。壓縮工作通常可以選用軟件或?qū)S糜布硗瓿伞H欢鴮S镁幋a壓縮軟件代碼規(guī)模較大,設(shè)備要求高,且機(jī)載微處理器功能有限,使其應(yīng)用受到限制。為保證系統(tǒng)最優(yōu)功能狀態(tài),選用MPEG-4專用編碼芯片對采集后得到的數(shù)字圖像進(jìn)行硬件編碼壓縮,生成MPEG-4碼流,實(shí)時(shí)性好,可靠性高。模塊工作和碼流流向由ARM微處理器調(diào)度管理,同時(shí),微處理器通過RS 485和攝像模塊相連,傳輸攝像機(jī)鏡頭的控制信號,如變倍、變焦等。機(jī)載云臺也通過RS485獲得用戶的遠(yuǎn)程控制信號,并通過水平和垂直方向的位置改變來響應(yīng)用戶的不同僨察需求。在完成數(shù)字視頻偵察系統(tǒng)的開發(fā)后,為系統(tǒng)加入了基于開放的802.11協(xié)議的無線加密傳輸模塊,為系統(tǒng)的安全工作帶來保證,避免了無線視頻系統(tǒng)的安全漏洞。
2 硬件設(shè)計(jì)
微型無人機(jī)視頻處理與傳輸系統(tǒng)主要包括視頻采集及處理模塊、無線數(shù)據(jù)傳輸模塊2個子系統(tǒng),是整個微型無人機(jī)視頻系統(tǒng)中的核心部分。
本文視頻編碼器采用的編碼器是ADI公司的ADV7180,它是ADI首次發(fā)表的低價(jià)格低消耗功率但提供高質(zhì)量影像輸出的影像編碼器。在它的輸入前端有階梯狀濾波器,不用為系統(tǒng)添加額外的濾波器。同時(shí),ADV7180還提供了DNR/CTI的影像強(qiáng)化輸出調(diào)整,ADLLT更獨(dú)步全球提供給系統(tǒng)在弱信號的處理上強(qiáng)有力的支持,使傳輸?shù)膱D像更加平穩(wěn)。擁有智能型影像處理器的ADV7180在控制上也更為簡化,只需設(shè)定少數(shù)的暫存器就可輸出高質(zhì)量影像,無需為影像編碼器設(shè)定繁瑣復(fù)雜的程序。
視頻壓縮芯片采用的是Imagia公司的MPG-440A,如圖2所示,它是針對網(wǎng)絡(luò)視頻傳輸所設(shè)計(jì)的MPEG-4專屬芯片。MPG-440A支持高階影像數(shù)字監(jiān)控功能,包含D1分辨率、防偽水印、動態(tài)調(diào)整IP幀比率與動態(tài)調(diào)整質(zhì)量,是特殊場合監(jiān)控用的最佳影像處理器,可產(chǎn)生最小比特率并符合長時(shí)間儲存要求。

主控芯片選取的是Imagia公司的MCP4010-32位RISC嵌入式微處理器,見圖3。它使用.ARM 922 T核,工作頻率高達(dá)200 MHz,內(nèi)部帶有存儲器管理單元(MMU),具有高性能、低功耗、接口豐富和體積小等優(yōu)良特性,是視頻采集和處理模塊的核心,可達(dá)到D1分辨率實(shí)時(shí)編碼壓縮的效能。
無線傳輸模塊采用Ralink公司提供的RT2561芯片方案的無線網(wǎng)卡,符合IEEE 802.11b/g/n標(biāo)準(zhǔn),傳輸速率高達(dá)128 Mb/s(自適應(yīng))。支持標(biāo)準(zhǔn)32位Mini-PCI接口;具有MIMO天線技術(shù),使傳輸更穩(wěn)定距離更廣;支持Windows/Linux/WinCE等操作系統(tǒng);工作頻率范圍為2.412~2.484 GHz;傳輸功率為18 dBm(典型值)。MCU4010和MCP440A如圖4所示,RT2561如圖5所示。
地面站采用便攜式設(shè)計(jì),主要用來接收無人機(jī)實(shí)時(shí)發(fā)送回的視頻信號,并將其顯示出來,包括接收天線、筆記本計(jì)算機(jī)或PDA。該系統(tǒng)采用的接收天線為TDJ-2400BKC-Y室外板狀定向天線,其具有增益高、前后輻射比大、三維尺寸小、結(jié)構(gòu)緊湊等優(yōu)點(diǎn),是一種高質(zhì)量的室外通信天線,非常符合無人機(jī)在野外條件下的戰(zhàn)術(shù)需求。其頻率范圍為2 400~2 483 MHz,增益為10 dBi,水平面波瓣寬度為110°。
3 軟件設(shè)計(jì)
該設(shè)計(jì)采用基于Web服務(wù)器的B/S(Browser/Server)服務(wù)機(jī)制,B/S服務(wù)機(jī)制是隨著Internet技術(shù)的興起,對C/S(Client/Server)服務(wù)機(jī)制的改進(jìn),由于其先進(jìn)的開發(fā)技術(shù)、優(yōu)越的可管理性和可維護(hù)性及簡單方便的應(yīng)用模式,正成為視頻監(jiān)控系統(tǒng)最流行的應(yīng)用方式。它能將地面站的視頻偵察系統(tǒng)控制、偵察視頻瀏覽、開關(guān)量的控制、攝像云臺控制等在IE瀏覽器中予以實(shí)現(xiàn),不用另行安裝軟件,使視頻偵察系統(tǒng)的操作、配制簡單化,實(shí)現(xiàn)了跨平臺性,客戶端在普通PC機(jī)、PDA等操作系統(tǒng)上均能運(yùn)行,非常適合戰(zhàn)術(shù)無人機(jī)的野外作業(yè)。下面分別介紹本系統(tǒng)服務(wù)器端和客戶端的主要功能:
(1)服務(wù)器端主要功能:響應(yīng)Web連接服務(wù),采集視頻數(shù)據(jù),通過網(wǎng)絡(luò)傳輸數(shù)據(jù)。
(2)機(jī)載微處理器作為服務(wù)器,響應(yīng)客戶端的連接請求,并提供ActiveX控件的下載,利用Linux視頻子系統(tǒng)提供的API函數(shù)編寫數(shù)據(jù)采集代碼,接收MPG-440A傳送的MPEG-4格式二進(jìn)制視頻數(shù)據(jù)。將接收到的數(shù)據(jù)整理后,通過Socket通訊以組播方式通過網(wǎng)絡(luò)發(fā)送到瀏覽器客戶端。
(3)客戶端部分的主要功能:連接機(jī)載Web服務(wù)器并下載ActiveX控件。
(4)為了減輕視頻服務(wù)器客戶端操作的負(fù)擔(dān),提高軟件升級和維護(hù)的方便性,設(shè)計(jì)中將地面站的視頻圖像接收和視頻圖像顯示部分封裝在ActiveX控件中,在運(yùn)行Linux的ARM串臺上移植嵌入式Web服務(wù)器Boa,響應(yīng)地面站的連接請求,并將ActiveX控件嵌入到網(wǎng)頁中發(fā)布。地面站通過瀏覽器訪問Web服務(wù)器時(shí),ActiveX控件就會經(jīng)過網(wǎng)頁傳輸?shù)娇蛻舳瞬⒆詣酉螺d安裝。一旦視頻偵察系統(tǒng)服務(wù)器端部分和ActiveX控件建立通信,就可通過Socket進(jìn)行視頻數(shù)據(jù)的組播傳輸,實(shí)現(xiàn)遠(yuǎn)程實(shí)時(shí)監(jiān)控。
4 飛行實(shí)驗(yàn)
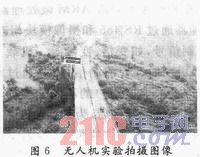
該系統(tǒng)在某戰(zhàn)術(shù)無人機(jī)上進(jìn)行了搭載飛行試驗(yàn),飛行高度約為200 m,攝像鏡頭的視角45°,平均飛行速度約為15 m/s。發(fā)射模塊將攝像頭拍攝到的數(shù)字視頻信號實(shí)時(shí)發(fā)送回地面,通過瀏覽器顯示的視頻截圖如圖6所示。機(jī)載飛行試驗(yàn)表明,在3 km范圍內(nèi),機(jī)載攝像與無線傳輸系統(tǒng)能較好地完成MAV攝像和傳輸任務(wù),該系統(tǒng)尺寸小、重量輕、功耗低、工作穩(wěn)定,滿足MAV有效載荷的基本要求。但由于無人機(jī)本身的重量輕,慣性很小,在低速飛行狀態(tài)時(shí),氣流擾動和機(jī)體本身的振動對攝像和傳輸?shù)馁|(zhì)量有影響,還需適當(dāng)采取減振措施,減少圖像在傳輸過程中產(chǎn)生的抖動。
5 結(jié)語
本文設(shè)計(jì)的基于ARM的嵌入式微小型無人機(jī)無線數(shù)字視頻傳輸系統(tǒng),包括硬件設(shè)計(jì)和Linux下的軟件設(shè)計(jì)。該系統(tǒng)在MCU4010嵌入式微處理器的協(xié)調(diào)和調(diào)度下統(tǒng)一工作,采甩專用MPEG-4音視頻編碼芯片MPG-440A將采集生成的數(shù)字視頻予以編碼壓縮處理,穩(wěn)定可靠,成本低,采用B/S結(jié)構(gòu)設(shè)計(jì),以組播方式傳輸,節(jié)省系統(tǒng)資源,易于維護(hù),升級方便,使用簡單。通過機(jī)載實(shí)驗(yàn)證明該系統(tǒng)基本滿足微小型無人機(jī)的要求,能夠做到實(shí)時(shí)傳輸回?zé)o人機(jī)偵察范圍內(nèi)的視頻圖像。