
摘 要: 介紹一種能在無人情況下自主工作,并具有自動避障等功能的新型智能吸塵器的開發(fā)及設(shè)計(jì),它自帶電源,由單片機(jī)控制。
關(guān)鍵詞: 超聲波 避障功能 MC51單片機(jī) 步進(jìn)電機(jī)" title="步進(jìn)電機(jī)">步進(jìn)電機(jī) 智能吸塵器
隨著社會的進(jìn)步和發(fā)展,人們的學(xué)習(xí)、工作越來越繁忙,于是怎樣更大程度地將人們從煩瑣的日常事物中解脫出來,就成了新一代家電所追求的目標(biāo)。而智能化正是這一目標(biāo)的集中體現(xiàn)。本文介紹的智能吸塵器初步實(shí)現(xiàn)了無人情況下的自主工作方式" title="工作方式">工作方式,很大程度地提高了產(chǎn)品的自動化水平。
1 總體原理
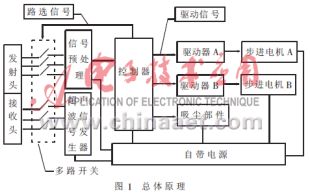
該智能吸塵器利用了超聲波測距" title="超聲波測距">超聲波測距的原理,通過向前進(jìn)方向發(fā)射超聲波脈沖,并接收相應(yīng)的返回聲波脈沖,對障礙物進(jìn)行判斷;通過以單片機(jī)為核心的控制器實(shí)現(xiàn)對超聲發(fā)射和接收的選通控制,并在處理返回脈沖信號" title="脈沖信號">脈沖信號的基礎(chǔ)上加以判斷,選定相應(yīng)的控制策略;通過驅(qū)動器驅(qū)動兩步進(jìn)電機(jī),帶動驅(qū)動輪,從而實(shí)現(xiàn)避障功能。與此同時,由其自身攜帶的小型吸塵部件,對經(jīng)過的地面進(jìn)行必要的吸塵清掃。
2 功能實(shí)能
整個吸塵器原理上可以分為五個主要部分(如圖1):傳感器部分、控制器部分、驅(qū)動部分、吸塵部分和電源部分。各部分的原理及具體功能實(shí)現(xiàn)如下:
2.1 傳感器部分
2.1.1 超聲波測距原理
超聲波是一種一定頻率范圍的聲波。它具有在同種媒質(zhì)中以恒定速率傳播的特性,而在不同媒質(zhì)的界面處,會產(chǎn)生反射現(xiàn)象。利用這一特性,就可以根據(jù)測量發(fā)射波與反射波之間的時間間隔,從而達(dá)到測量距離的作用。其具體的計(jì)算公式如下:
S=v×t/2
其中,S為障礙物與吸塵器之間的距離;t為發(fā)射到接收經(jīng)歷的時間;v為聲波在空氣中傳播的速度。由于v的值受溫度的影響會波動,因此,在實(shí)際的應(yīng)用中可以用以下公式來加以補(bǔ)償,其中T表示空氣的絕對溫度,m/s為速度單位。

在智能吸塵器中,避障功能的實(shí)現(xiàn)正是利用了這一超聲波測距的原理。它的傳感器部分由三對(每對包括一個發(fā)射探頭和一個接收探頭)共六個超聲波傳感頭組成。由單獨(dú)的振蕩電路產(chǎn)生頻率固定為40kHz,幅值為5V的超聲波信號。在控制器送來的路選信號(如圖1)的作用下,40kHz的振蕩信號被加在超聲發(fā)射探頭的兩端,從而產(chǎn)生超聲信號向外發(fā)射;該信號遇到障礙物時,產(chǎn)生反射波,當(dāng)這一反射波被接收探頭接收后,根據(jù)前述測距的原理,就可以精確地判斷障礙物的遠(yuǎn)近;同時,根據(jù)信號的幅值大小,也可以初步確定障礙物的大小。
2.1.2 探測范圍的確定
由于每一個超聲波探頭都有一定的指向性(即發(fā)射或接受的空間范圍),所以在測量時必然存在盲區(qū)(如圖2)。因此,三對傳感器必然以一定的尺寸分布在吸塵器的前端,從而使傳感器測量的范圍包含整個吸塵器所必須經(jīng)過的空間,同時又避免探測死角(既使盲區(qū)落在須測量的范圍之外)。

2.1.3 防止干擾
由于三對超聲波傳感探頭之間的安裝距離比較近,因而存在相互干擾的問題。為了解決這一問題,在設(shè)計(jì)中引進(jìn)了循環(huán)掃描的方式。既循環(huán)地對每組探頭施加發(fā)射和接收,當(dāng)一組工作時,其余兩組停止。循環(huán)周期由路選信號來控制,只有15ms(即在15ms的時間里完成一次對三組探頭的掃描),因而在實(shí)際應(yīng)用中很可靠。
2.2 控制部分
控制部分的核心是MC51單片機(jī),它主要完成三個部分的任務(wù):
·向傳感器部分(三路" title="三路">三路)分別送路選信號:當(dāng)路選信號是高電頻時,該路導(dǎo)通;反之,就截止。這樣,通過路選信號,就可以完成三路信號的順序掃描以及對發(fā)射和接收的計(jì)時功能。
·作為控制器的核心,它要根據(jù)接收的信號(左、中、右三路)的幅值,以及從發(fā)射到接收的時間間隔,計(jì)算并判斷障礙物的相對位置,大致大小。在此基礎(chǔ)上,根據(jù)事先設(shè)定的規(guī)則,選定相應(yīng)的避障措施(前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、調(diào)頭)。
·最后,在確定了避障措施后,要向步進(jìn)電機(jī)的控制器輸出相應(yīng)的控制脈沖,以具體實(shí)現(xiàn)避障。
2.3 驅(qū)動部分
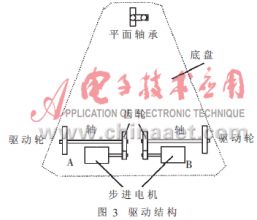
驅(qū)動部分是由兩個四相步進(jìn)電機(jī)以及相應(yīng)的驅(qū)動機(jī)構(gòu)組成的。步進(jìn)電機(jī)帶動兩驅(qū)動輪(后輪),從而推動吸塵器運(yùn)動。前輪不再采用傳統(tǒng)的雙輪結(jié)構(gòu),而采用了應(yīng)用非常廣泛的平面軸承,這既減小了結(jié)構(gòu)復(fù)雜度,又提高了轉(zhuǎn)彎的靈活性(如圖3)。通過改變作用于步進(jìn)電機(jī)的脈沖信號的頻率,可以對步進(jìn)電機(jī)實(shí)現(xiàn)較高精度的調(diào)速。同時在對兩電機(jī)分別施加相同或不同脈沖信號時,通過差速方式,可以方便的實(shí)現(xiàn)吸塵器前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、調(diào)頭等功能。這一設(shè)計(jì)的最大優(yōu)點(diǎn)是吸塵器能夠在任意半徑下,以任意速度實(shí)現(xiàn)轉(zhuǎn)彎,甚至當(dāng)兩后輪相互反向運(yùn)動時,實(shí)現(xiàn)零轉(zhuǎn)彎半徑(即繞軸中點(diǎn)原地施轉(zhuǎn))。同時轉(zhuǎn)彎的速度可通過改變單片機(jī)的程序來調(diào)節(jié)。
由于智能吸塵器是邊行走邊工作的,所以要求速度很低,一般要求5m/min左右,而步進(jìn)電機(jī)為避免低速爬行,其轉(zhuǎn)速又不能太低,為此,在電機(jī)軸與輪軸之間采用了一級齒輪傳動,設(shè)計(jì)傳動比為3.7。設(shè)電機(jī)的轉(zhuǎn)速為n(轉(zhuǎn)/秒),驅(qū)動輪的半徑為r(米),則驅(qū)動輪的前進(jìn)速度為:

式中,vk、k=1、2,代表左右驅(qū)動輪的線速度;i——齒輪傳動比。通過調(diào)節(jié)n的大小和正反,可以實(shí)現(xiàn)vk的連續(xù)變化,從而實(shí)現(xiàn)任意半徑的轉(zhuǎn)彎。電機(jī)轉(zhuǎn)向與吸塵器的運(yùn)動方式的關(guān)系如表1。
2.4 吸塵器部分
吸塵功能是由封閉在殼體中的小型吸塵器完成的。包括氣泵、吸室、吸道和吸嘴。在吸塵器爬行的過程中,通過底盤上開的吸嘴將掃過的地面上的灰塵吸入吸室。
2.5 電源部分
由于智能吸塵器是以自主方式工作的,因而所用的電源不是一般拖線方式,而是采用隨身攜帶的蓄電池(3A/20hour)。這樣不但可實(shí)現(xiàn)無人控制,而且工作時較靈活。一次充電可以連續(xù)工作幾個小時。
3 部分電路說明
3.1 超聲信號發(fā)生
40kHz的超聲波信號是由555芯片構(gòu)成的多諧振蕩電路產(chǎn)生的(如圖4)。由R1、R11、R12和C1構(gòu)成外圍的充放電電路;當(dāng)參數(shù)漂移時,通過調(diào)節(jié)R12的阻值,可微調(diào)信號的中心頻率。
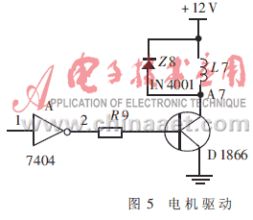
3.2 步進(jìn)電機(jī)驅(qū)動
由控制器輸出的驅(qū)動脈沖信號經(jīng)7404反向后,驅(qū)動功率三極管從而帶動步進(jìn)電機(jī)。圖5列出了一相的驅(qū)動電路。由于有兩個步進(jìn)電機(jī),每一電機(jī)按四相八拍制工作,因而共有八組驅(qū)動電路。
3.3 控制器
控制器是由MC51單片機(jī)構(gòu)成的。與前述控制器所完成的三相主要任務(wù)相對應(yīng)的硬件結(jié)構(gòu)分別介紹如下:路選信號由單片機(jī)的P1口輸出,占用了P1.0~P1.5共6腳。它們直接控制6個模擬開關(guān);步進(jìn)電機(jī)的驅(qū)動信號由P2口輸出,P2.0~P2.3控制步進(jìn)電機(jī)A,P2.4~P2.7控制步進(jìn)電機(jī)B;超聲返回信號經(jīng)放大、濾波、檢波后,引入單片機(jī)的中斷口,激勵相應(yīng)的中斷處理程序。
4 系統(tǒng)性能及特點(diǎn)
從以上介紹可以看出,新一代的智能吸塵器通過將MC51單片微機(jī)與自身相結(jié)合,極大地提高了產(chǎn)品的可塑性,適應(yīng)于高層次的開發(fā)與應(yīng)用。它在完成超聲避障的基礎(chǔ)上,初步實(shí)現(xiàn)了無人干預(yù)下的自主工作方式,同時由于特殊的驅(qū)動結(jié)構(gòu)的設(shè)計(jì),實(shí)現(xiàn)零半徑的轉(zhuǎn)彎,因而具有智能化、高效性、輕便、靈巧等特點(diǎn),是較新的發(fā)展方向。
參考文獻(xiàn)
1 李廣弟.單片機(jī)基礎(chǔ).北京:航空航天大學(xué)出版社
2 郭景蘭.控制微電機(jī).北京:冶金工業(yè)出版社
3 S.C.Pomeroy、H.J.Dixon.Ultrasonic Distance measuring and imaging system for industrial Robot.Proc.of 6th Int.Conf.Robot Vision and Sensory Controls、1985