
概述
無(wú)位置傳感器的無(wú)刷直流電機(jī)(Brushless Direct Current Motor, BLDCM)由于其快速、可靠性高、體積小、重量輕等特點(diǎn),在航模領(lǐng)域得到了廣泛的應(yīng)用。但是與有刷電機(jī)和有位置傳感器的無(wú)刷直流電機(jī)相比,其控制算法要復(fù)雜得多。加上航模設(shè)計(jì)中對(duì)重量和體積的要求非常嚴(yán)格,因此要求硬件電路盡可能簡(jiǎn)單,更增加了軟件的難度。
本文提出了一種基于中穎8位單片機(jī)SH79F168的控制方案,借助于該芯片片內(nèi)集成的針對(duì)電機(jī)控制的功能模塊,只需很少的外圍電路即可搭建控制系統(tǒng),實(shí)現(xiàn)基于反電動(dòng)勢(shì)法的無(wú)位置傳感器BLDC控制,在保證穩(wěn)定性和可靠性的基礎(chǔ)上大大降低了系統(tǒng)成本。而且該芯片與傳統(tǒng)8051完全兼容,易于上手,從而也降低了研發(fā)成本。
系統(tǒng)硬件設(shè)計(jì)
本方案選用中穎的8位單片機(jī)SH79F168做為主控芯片。該芯片采用優(yōu)化的單機(jī)器周期8051核,內(nèi)置16K FLASH存儲(chǔ)器,兼容傳統(tǒng)8051所有硬件資源,采用JTAG仿真方式,內(nèi)置16.6M振蕩器,同時(shí)擴(kuò)展了如下功能:
·雙DPTR指針. 16位x8乘法器和16位/8除法器.
·3通道12位帶死區(qū)控制PWM,6路輸出,輸出極性可設(shè)為中心或邊沿對(duì)齊模式;同時(shí)集成故障檢測(cè)功能,可瞬時(shí)關(guān)閉PWM輸出;
·7通道10位ADC模塊;
·內(nèi)置放大器和比較器,可用作電流放大采樣和過(guò)流保護(hù);
·增強(qiáng)的外部中斷,提供4種觸發(fā)方式;
·提供硬件抗干擾措施;
·Flash自編程功能,方便存儲(chǔ)參數(shù);
主系統(tǒng)硬件架構(gòu)如圖1所示,從圖中可以看出該系統(tǒng)大部分功能都由片內(nèi)集成的模塊完成。外圍電路的簡(jiǎn)化一方面可以提高系統(tǒng)可靠性,另一方面也降低了成本。
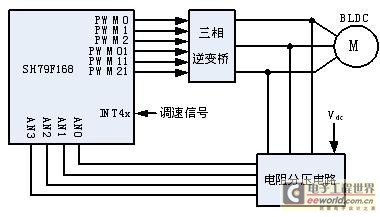
圖1:系統(tǒng)硬件架構(gòu)。
三相逆變橋采用上橋PMOS用三極管驅(qū)動(dòng),下橋NMOS用PWM端口直接驅(qū)動(dòng)的方式,如圖2所示。
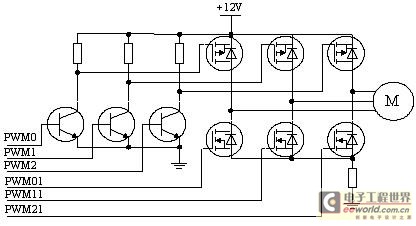
圖2:三相逆變橋。
SH79F169片內(nèi)集成了三通道6路PWM端口,可分別獨(dú)立配置為PWM輸出或者IO輸出。將PWM01~PWM21配置為PWM輸出,直接驅(qū)動(dòng)三相逆變橋的下橋;PWM0~PWM2配置為IO端口,經(jīng)過(guò)晶體管反相電路后驅(qū)動(dòng)三相逆變橋的上橋。
外部中斷輸入INT4x配置為雙沿觸發(fā),即輸入信號(hào)的上升沿和下降沿都能觸發(fā)中斷,可用于捕捉調(diào)速給定信號(hào)。